
端侧AI芯片的胜负正在转向整机化凭证
核心观点 端侧 AI 芯片竞争正在从“单颗 SoC 能提供多少 TOPS”,转向“这颗芯片能否被验证为一个可交付、可维护、可认证的整机系统”。Qualcomm Dragonwing IQ10 RRD、NVIDIA Jetson T4000、后
核心观点 端侧 AI 芯片竞争正在从“单颗 SoC 能提供多少 TOPS”,转向“这颗芯片能否被验证为一个可交付、可维护、可认证的整机系统”。Qualcomm Dragonwing IQ10 RRD、NVIDIA Jetson T4000、后
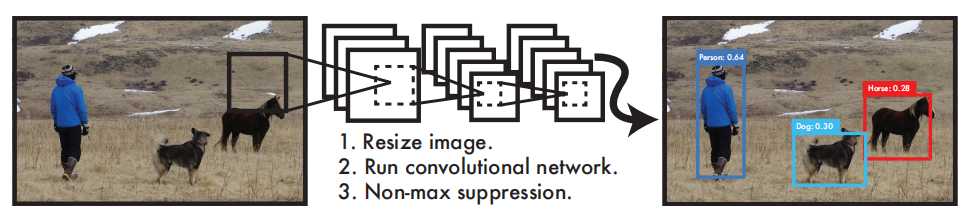
介绍 YOLO在目标视觉检测应用广泛,You Only Look Once的简称。作者期望YOLO能像人一样只需要看一眼就能够立即识别其中的物体、位置及交互关系。能够达到快速、实时检测的效果。 YOLO
环境准备 本文通过采集USB摄像头来示例说明 export LD_LIBRARY_PATH=/mnt/extsd/usr/lib:$LD_LIBRARY_PATH #指定库的路径 cat /sys/devices/platform/soc/usbc0/usb_host #激活USB host 摄像头采集 摄像头相关的主要使用的是VideoCapture类。 …
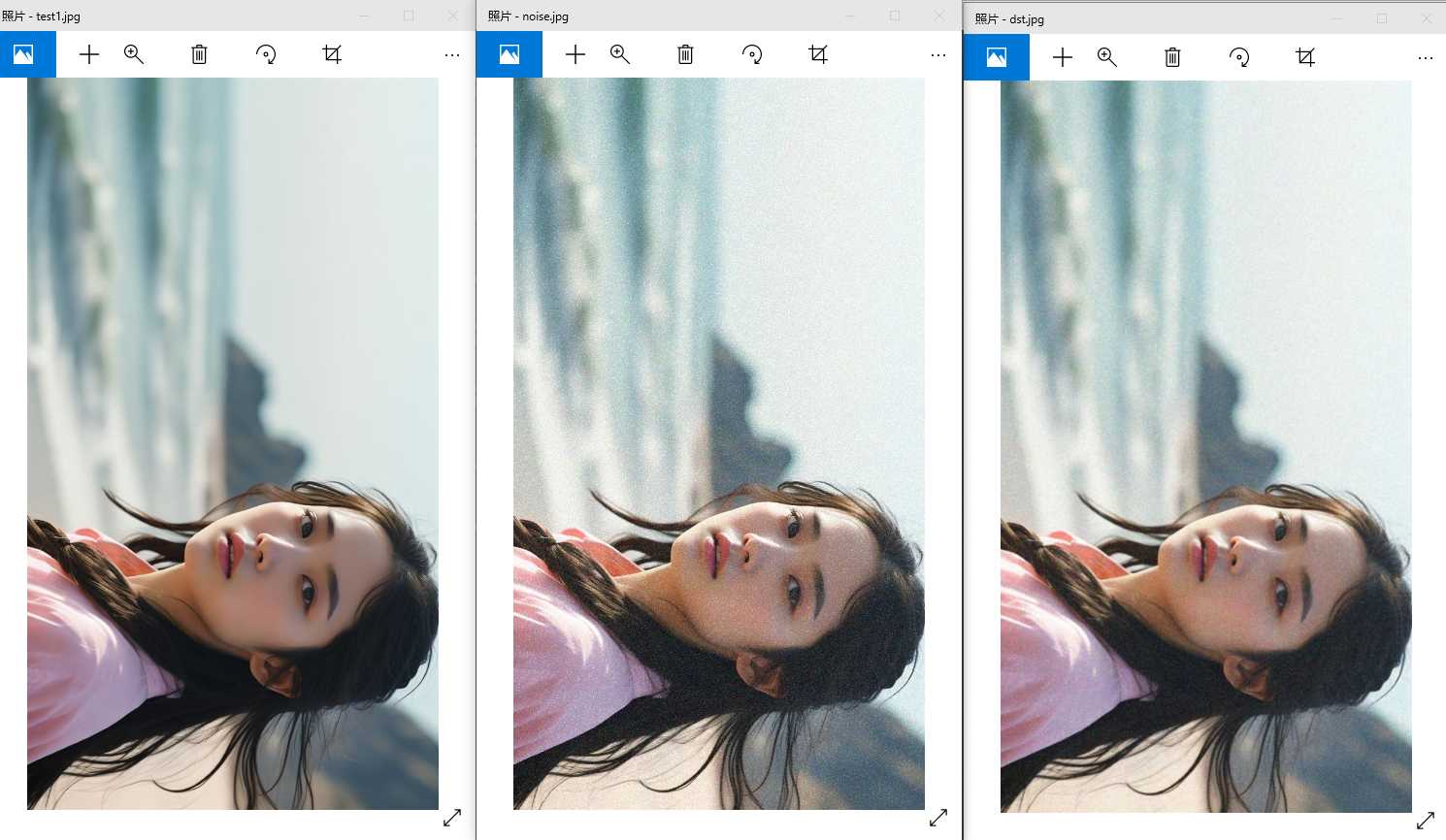
图像滤波 图像的滤波核心是使用一个小的矩阵(滤波器或卷积核)在图像上进行滑动卷积,将计算得到的结果作为目标像素的值。 均值滤波 cv::blur(InputArray src, OutputArray dst, Size ksize, Point anchor = Point(-1,-1), int borderType = BORDER_DEFAULT); …
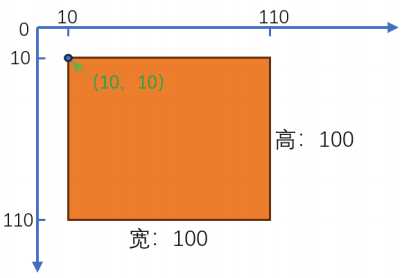
图像的读取和显示 读写图像 cv::Mat image = cv::imread("image.jpg", cv::IMREAD_COLOR); 使用imread函数读取图像,第一个参数是图像文件的路径,第二个参数是解释图像的颜色和格式(如彩色图像、灰度图像等)。第二个参数可省略,默认是cv
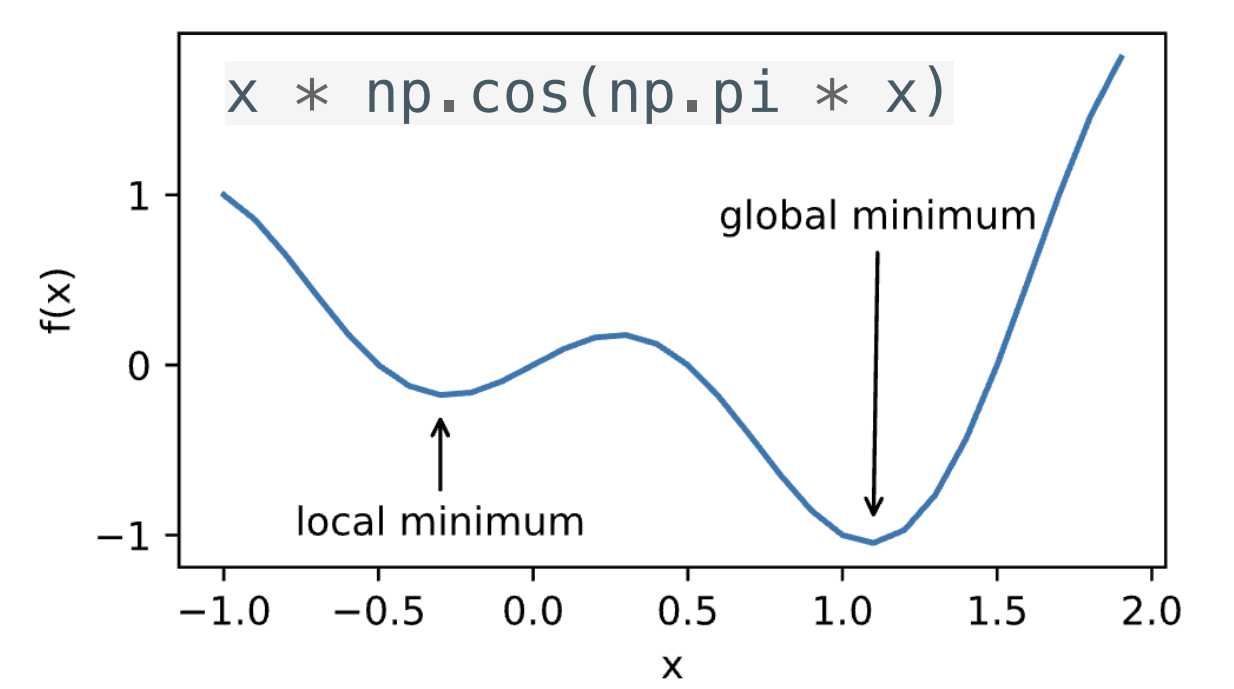
局部最小与全局最小 对应任何目标函数f(x),当然这里的目标函数可以是损失函数。如果在x处对应的f(x)小于x附近任意点的f(x),那么f(x)是局部最小的。如果f(x)在x处的值是
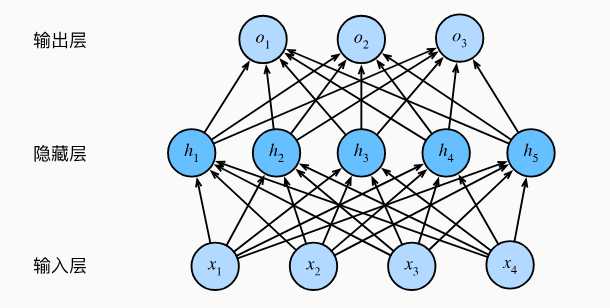
层的概念 在前面http://www.laumy.tech/2013.html有说明"层与块"概念,为了加深影响,本章再简要概括一下深度学习中常见的层。 在深度学习
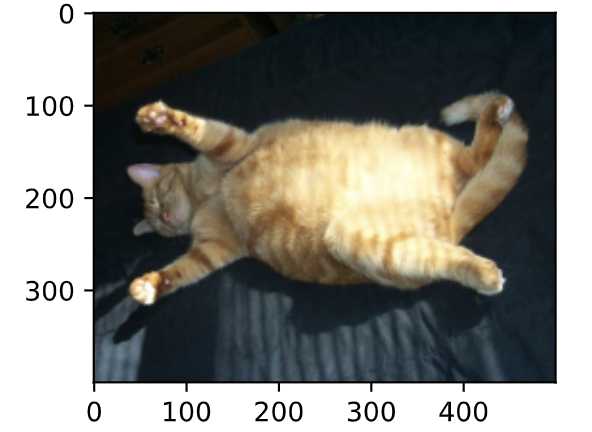
图像增广 什么是图像增广?图像增广(Image Augmentation)是通过对原始图像进行一系列随机变换(如旋转、裁剪、颜色调整等)生成多样化样本的数据增强技术,旨在扩充训练数据集
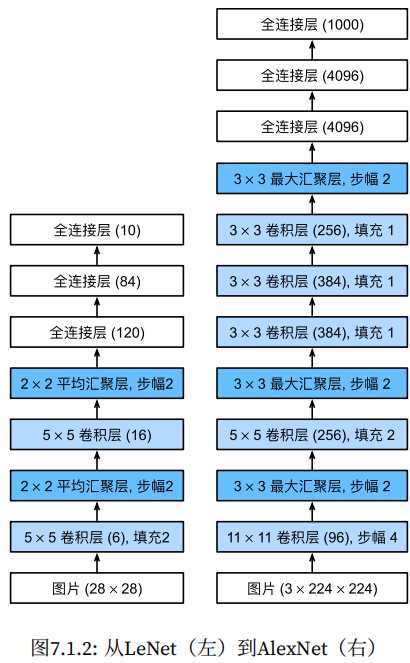
深度卷积神经网络AlexNet AlexNet相对LeNet的特点就是层数变得更深了,参数变得更多了。AlexNet由八层组成:五个卷积层、两个全连接隐藏层和一个全连接输出层。Ale
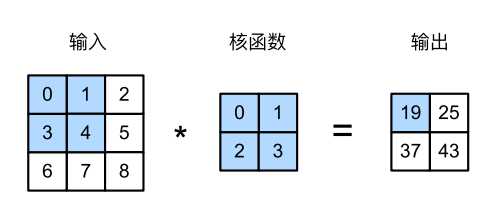
图像卷积 图像卷积是有一个卷积核,这个卷积核对输入做相关运算。卷积核从输入的张量左上角开始、从左到右、从上到下进行滑动,每到一个位置时,在该窗口的部分张量与卷积核做点积得到一个输出。
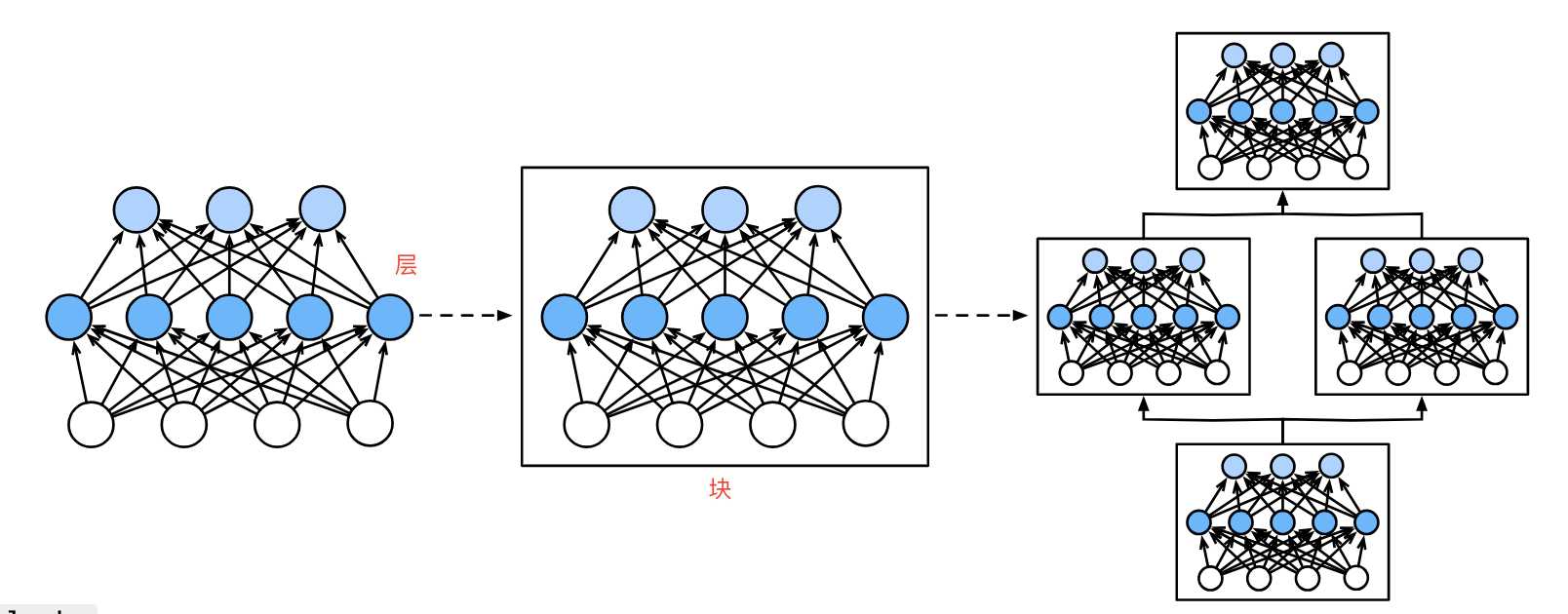
简单来说,如下图,第一个图中间5个神经元组成了一个层。第二图3个层组成了块。第三个图中3个块组成了整个模型。 层 层是神经网络的基本计算单元,负责对输入数据进行特定形式的变换,如线性映