
本地智能竞争正在转向可治理闭环
核心观点 本周更值得连起来看的不是某一颗芯片、某一个模型或某一个 Agent 产品,而是端侧 AI、机器人世界模型、运行时和企业 Agent 权限开始同时向“可执行、可复用、可审计”的闭环收敛。一个可辩论的判
核心观点 本周更值得连起来看的不是某一颗芯片、某一个模型或某一个 Agent 产品,而是端侧 AI、机器人世界模型、运行时和企业 Agent 权限开始同时向“可执行、可复用、可审计”的闭环收敛。一个可辩论的判
概述 JSON-RPC是一种无状态、轻量的远程调用(RPC)协议,其有一套规范,定义了若干数据结构及其处理规则。它对传输层是无关的,可以在同一进程中传递使用,也可以跨进程、跨环境如s
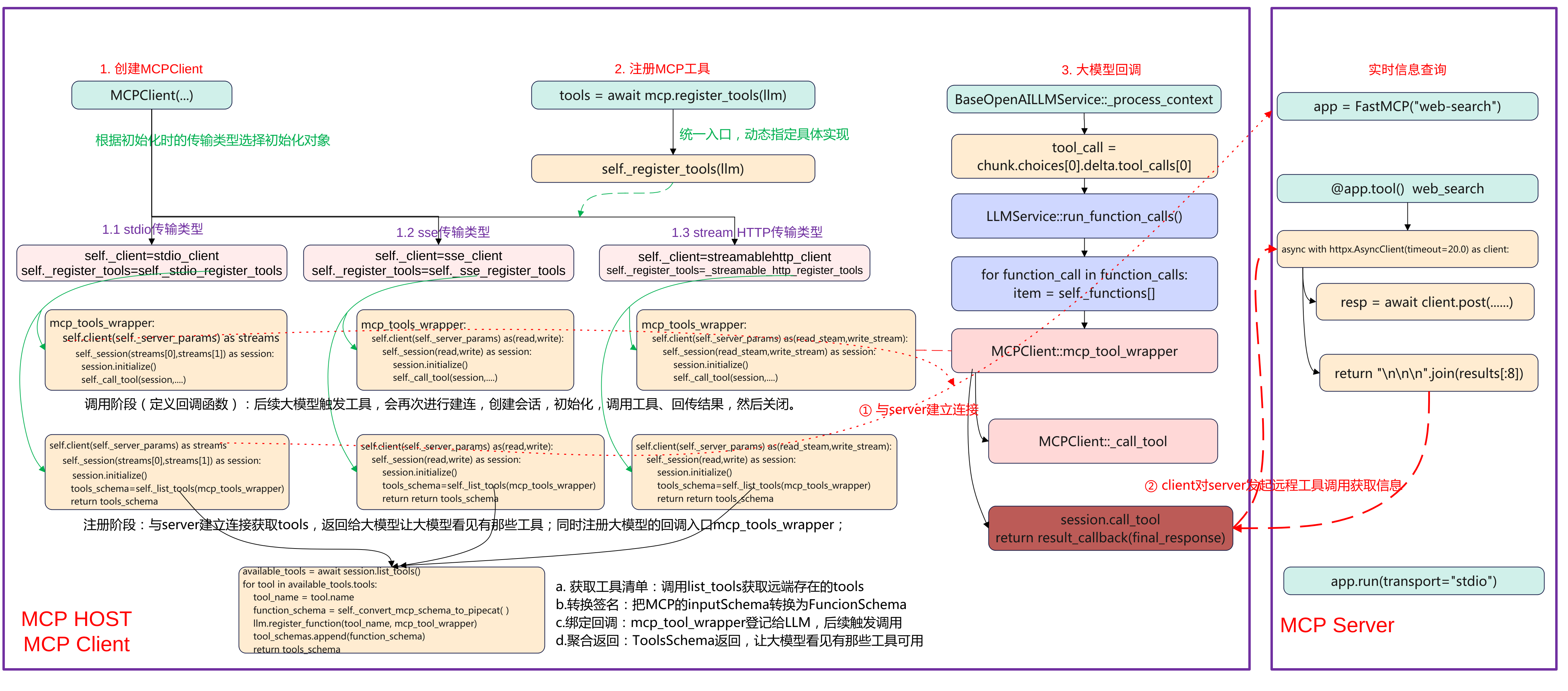
简介 本文主要基于Pipecat实现一个MCP stdio传输方式调用的示例。基于智谱Web-Search-Pro实现一个MCP Server,然后在Pipecat应用基础上实现MCP C
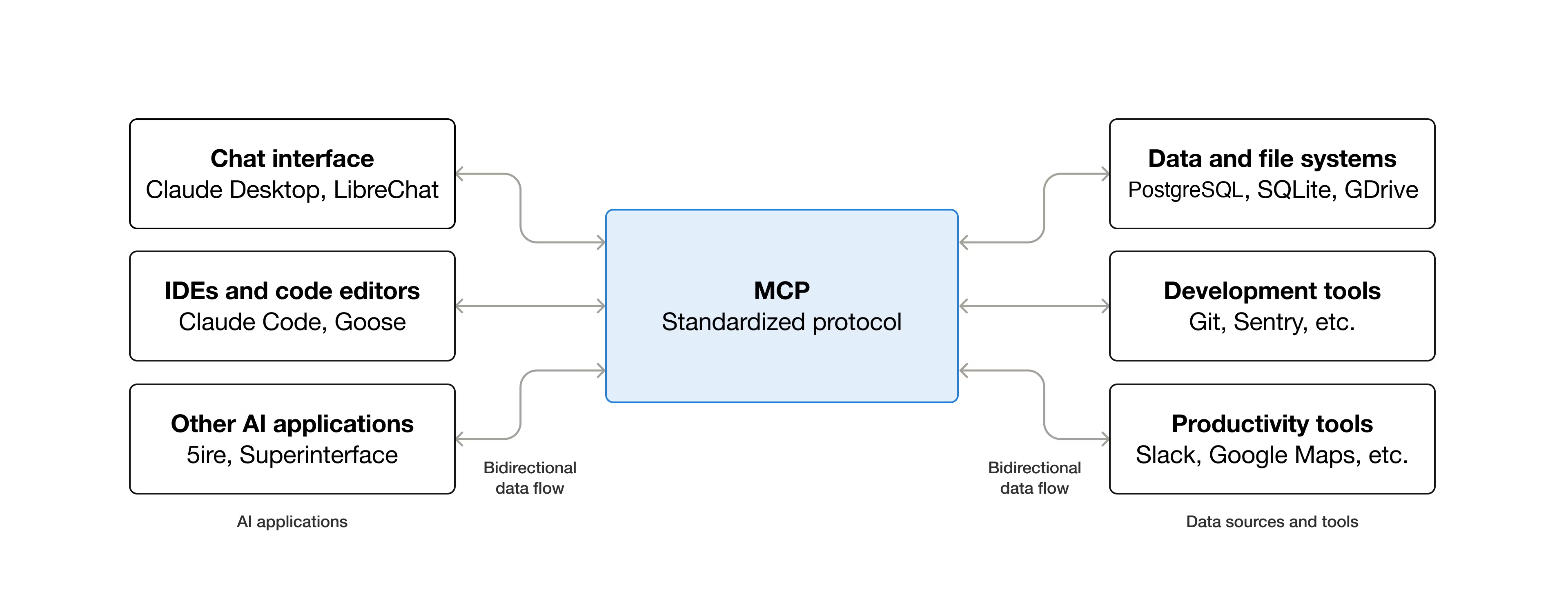
简介 什么是MCP MCP是Model Context Protocol模型上下文的一个开源标准,用于连接人工智能应用程序到外部系统。使用MCP,让Claude、ChatGPT这样的AI applica
录制 设备端 先确定一下相机编号 cd ~/lerobot/ lerobot-find-cameras 生成路径:outputs/captured_images 然后修改uart的权限 sudo chmod 666 /dev/ttyACM0 启动等待连接 python -m lerobot.robots.lekiwi.lekiwi_host \ …
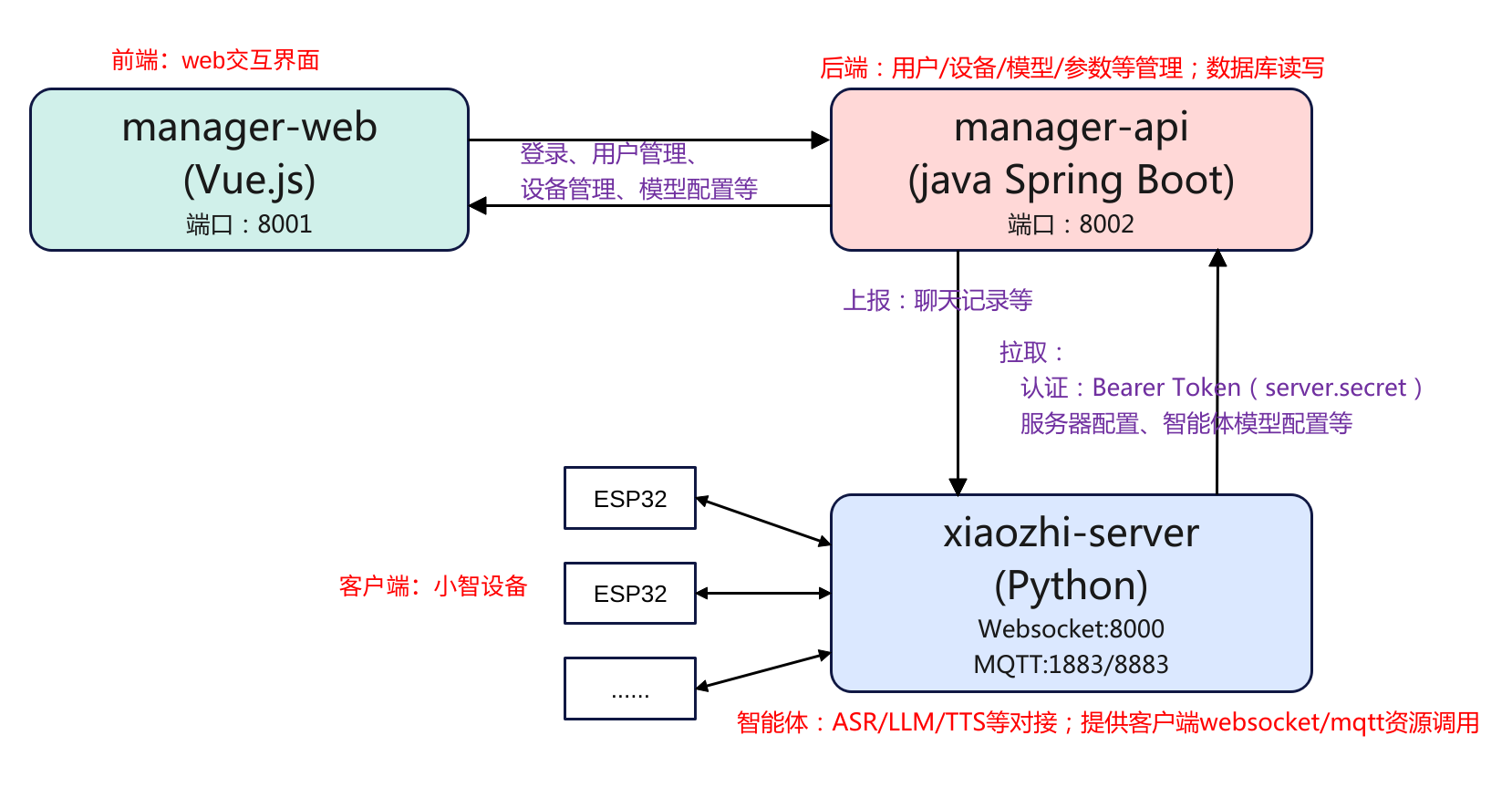
简介 本文主要是记录在ubuntu系统从零源码的方式本地部署小智Ai服务端的过程,项目的地址为:xiaozhi-server。在部署之前简单了解一下其项目框架,这里总结可以分为3部分
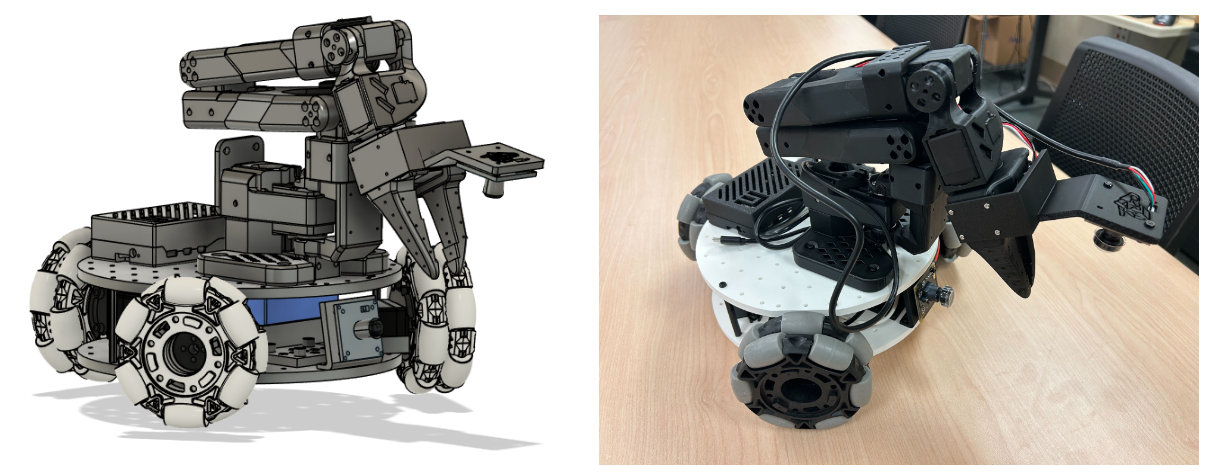
系统架构 硬件组成 Lekiwi是一个底盘+机械臂的结构。 机械臂: 6个自由度(shoulder_pan, shoulder_lift, elbow_flex, wrist_flex, wrist_roll, gripper) 移动底盘:3个全向轮,三轮全向移动(left_wheel

环境准备 简要记录在Orin nano平台搭建lekiwi环境,可以远程遥控底盘移动和机械臂示教的过程,需要的硬件如下: - NVIDIA Jetson Orin Nano开发板 - Lekiwi套件(底盘、主从机械臂) - P
安装浏览器 sudo apt update sudo apt install chromium-browser -y 安装后发现点击浏览器会没反应。按照下面方法配置。 snap download snapd --revision=24724 sudo snap ack snapd_24724.assert sudo snap install …
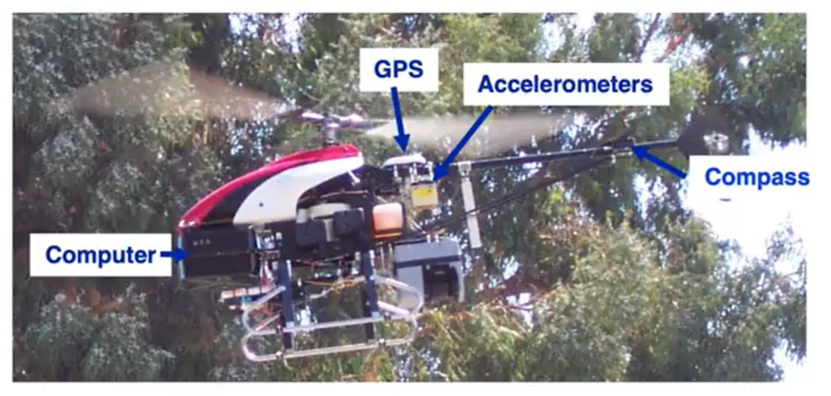
强化学习简介 什么是强化学习 以直升机控制飞行的程序来举例。 自动驾驶的直升机配备了机载计算机、GPS、加速度计、陀螺仪和磁罗盘,我们可以实时确定的知道直升机的位置。如何使用强化学习来让
概念 WBC(Whole-Body Control,全身控制)是什么?机器人是由“各关节”组成的,其不是“各关节各玩各的”而是一个耦合的整体。在某个时刻可能要做很多事情,比如保持平衡(