
本地智能竞争正在转向可治理闭环
核心观点 本周更值得连起来看的不是某一颗芯片、某一个模型或某一个 Agent 产品,而是端侧 AI、机器人世界模型、运行时和企业 Agent 权限开始同时向“可执行、可复用、可审计”的闭环收敛。一个可辩论的判
核心观点 本周更值得连起来看的不是某一颗芯片、某一个模型或某一个 Agent 产品,而是端侧 AI、机器人世界模型、运行时和企业 Agent 权限开始同时向“可执行、可复用、可审计”的闭环收敛。一个可辩论的判
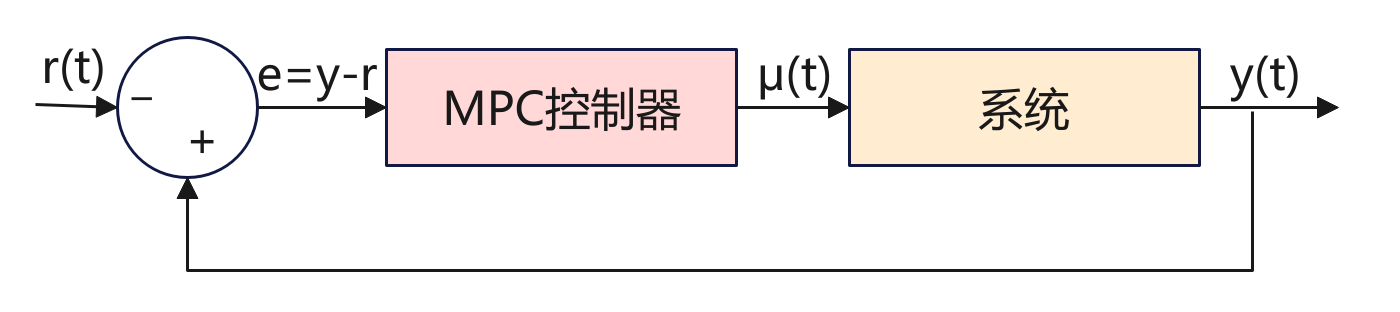
背景 MPC(Model Predictive Control)模型预测控制,是一种控制方法,广泛应用在机器人、无人驾驶、过程控制、能源系统等领域。它的核心思想用一句话来总结:利用系统模型预测未来,并通过
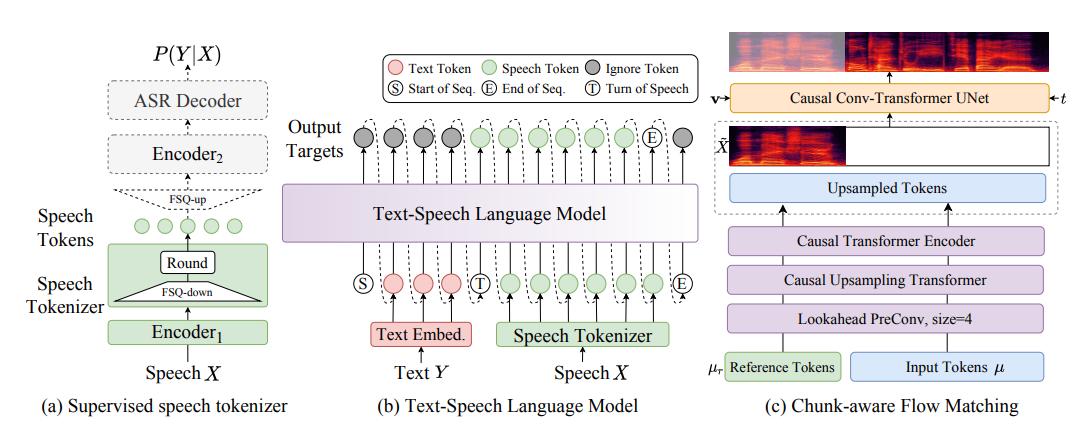
是什么 CosyVoice是阿里开源的一款文字转语音的开源模型,可以支持音色复刻。 怎么用 环境安装 (1)代码下载 git clone --recursive https://github.com/FunAudioLLM/CosyVoice.git cd CosyVoice git submodule update --init --recursive 因 …
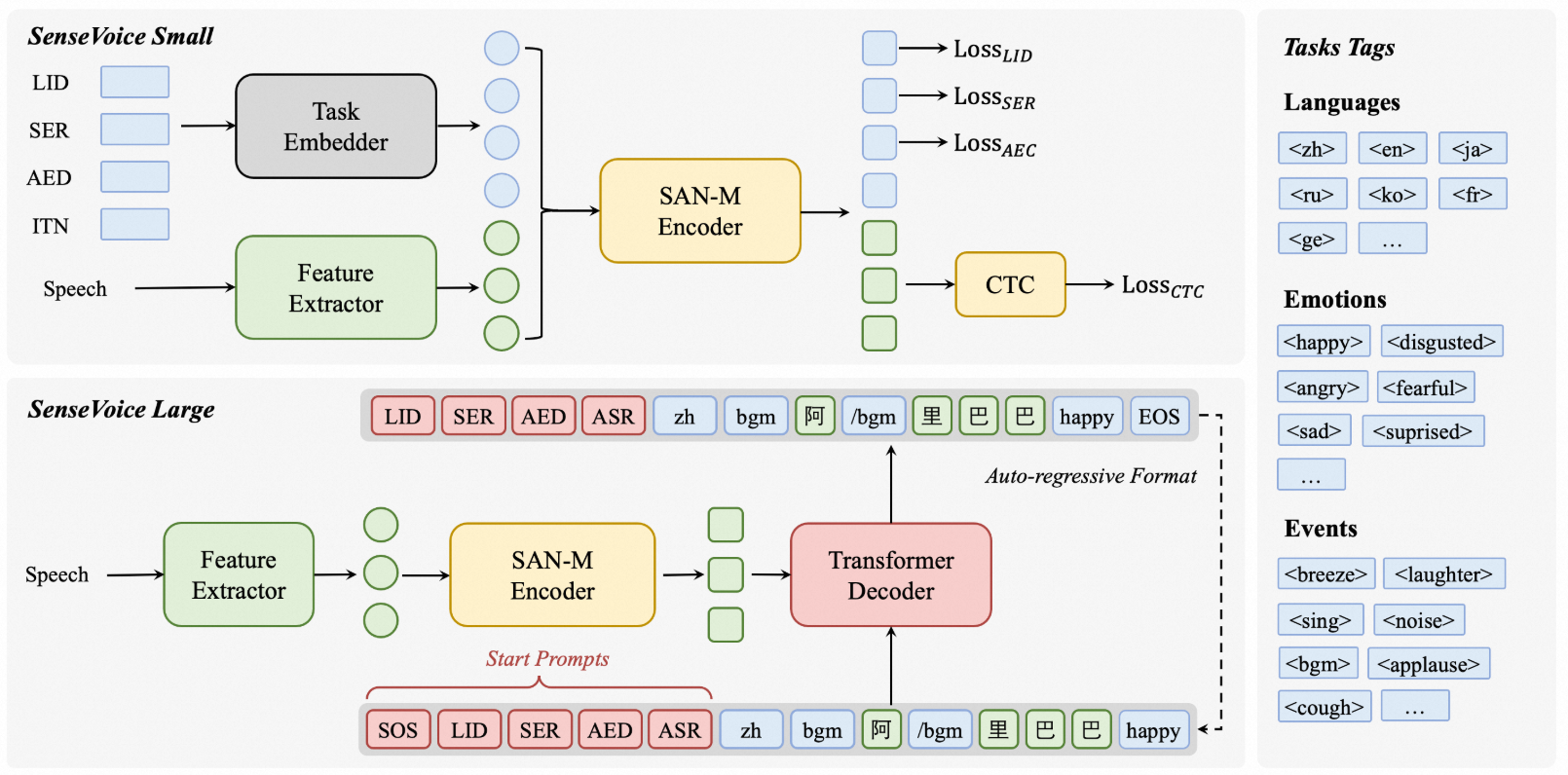
是什么 SenseVoice是多语言识别的模型,支持语音转文字(ASR, Automatic Speech Recognition,自动语音识别),语种识别(LID, Language Identification),语音情感识别(
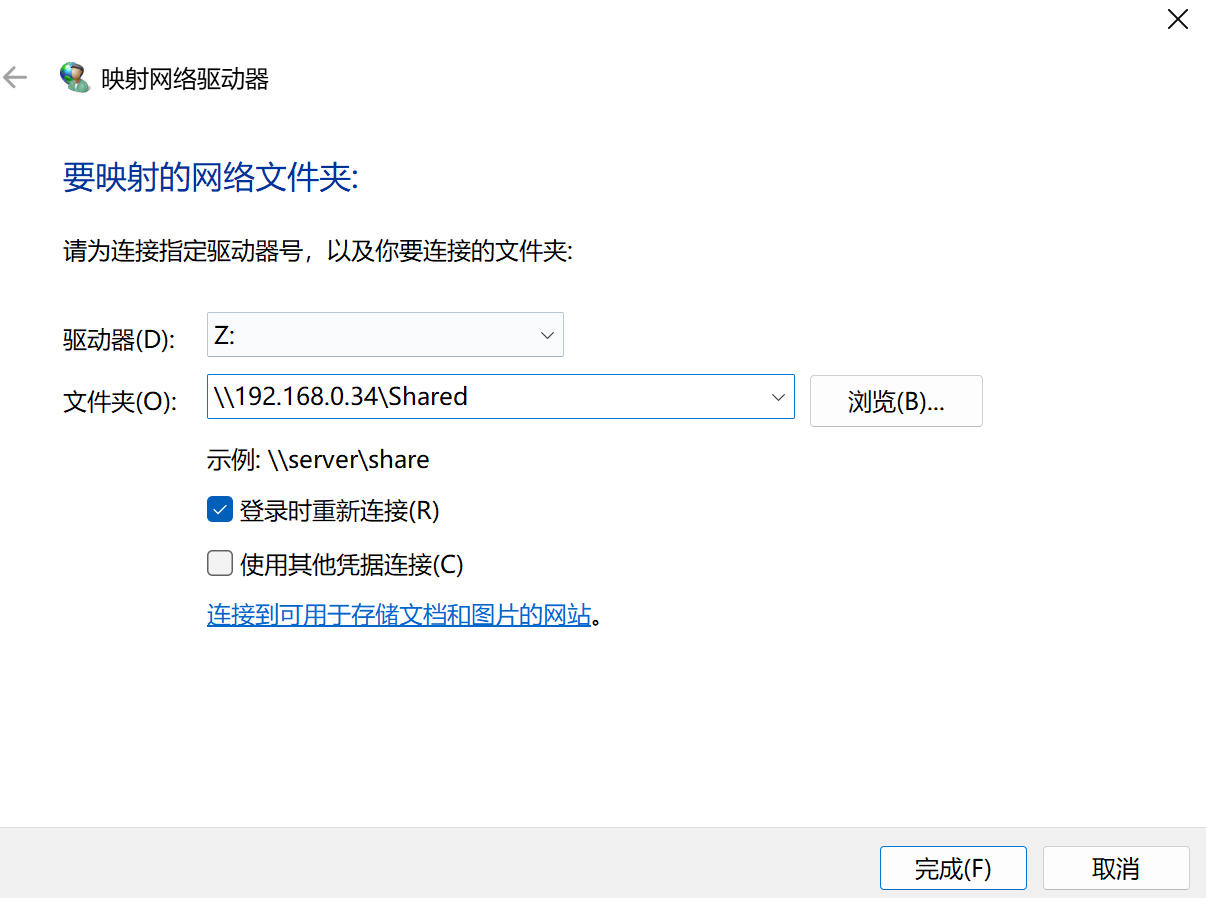
Linux 服务 安装 Samba 是Linux上实现SMB/CIFS 协议的服务,可以让 Windows、Linux、macOS 之间互相访问文件夹。 安装samba sudo apt update sudo apt install samba -y 配置 (1)配置文件 sudo vim /etc/samba/smb.conf [share] path
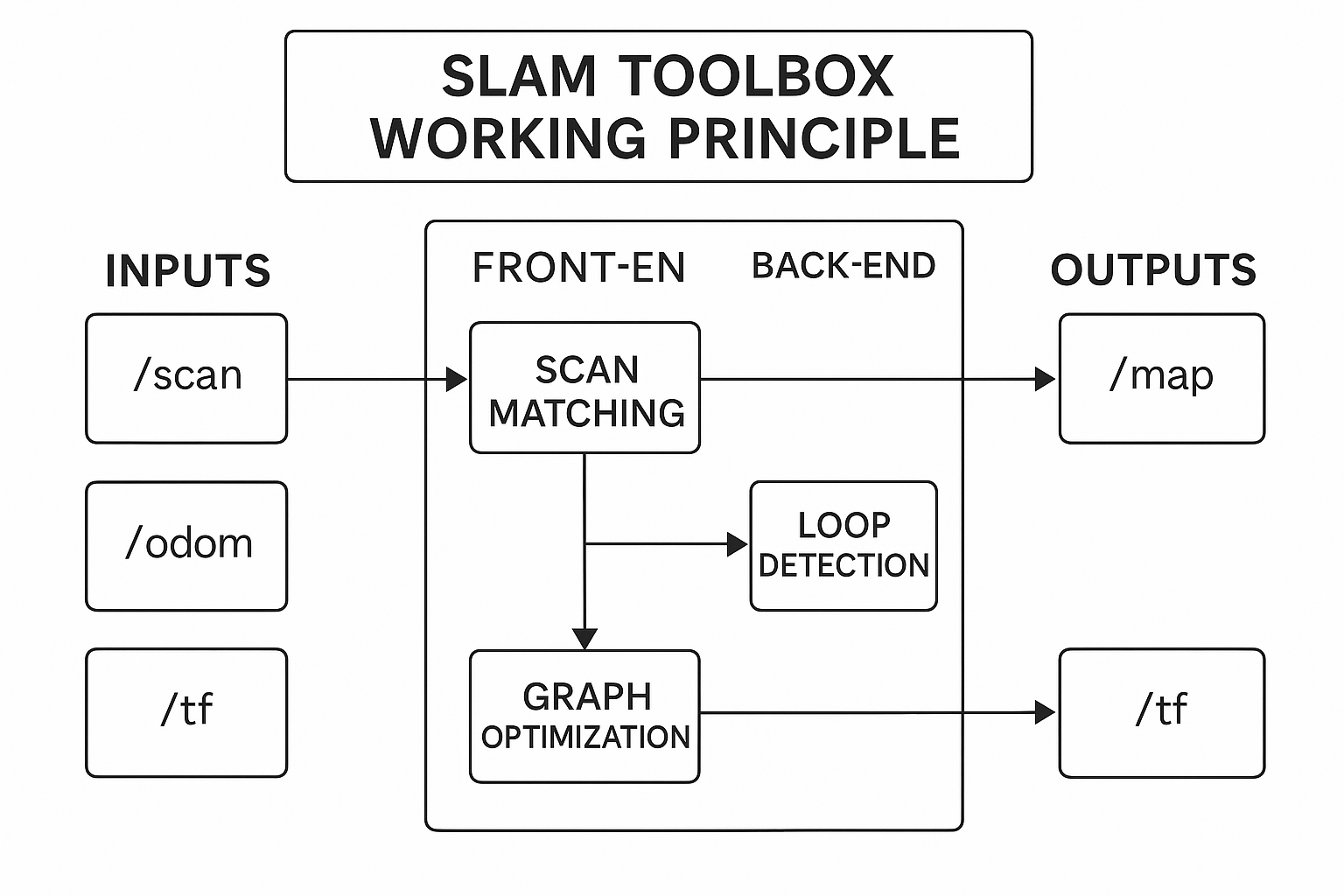
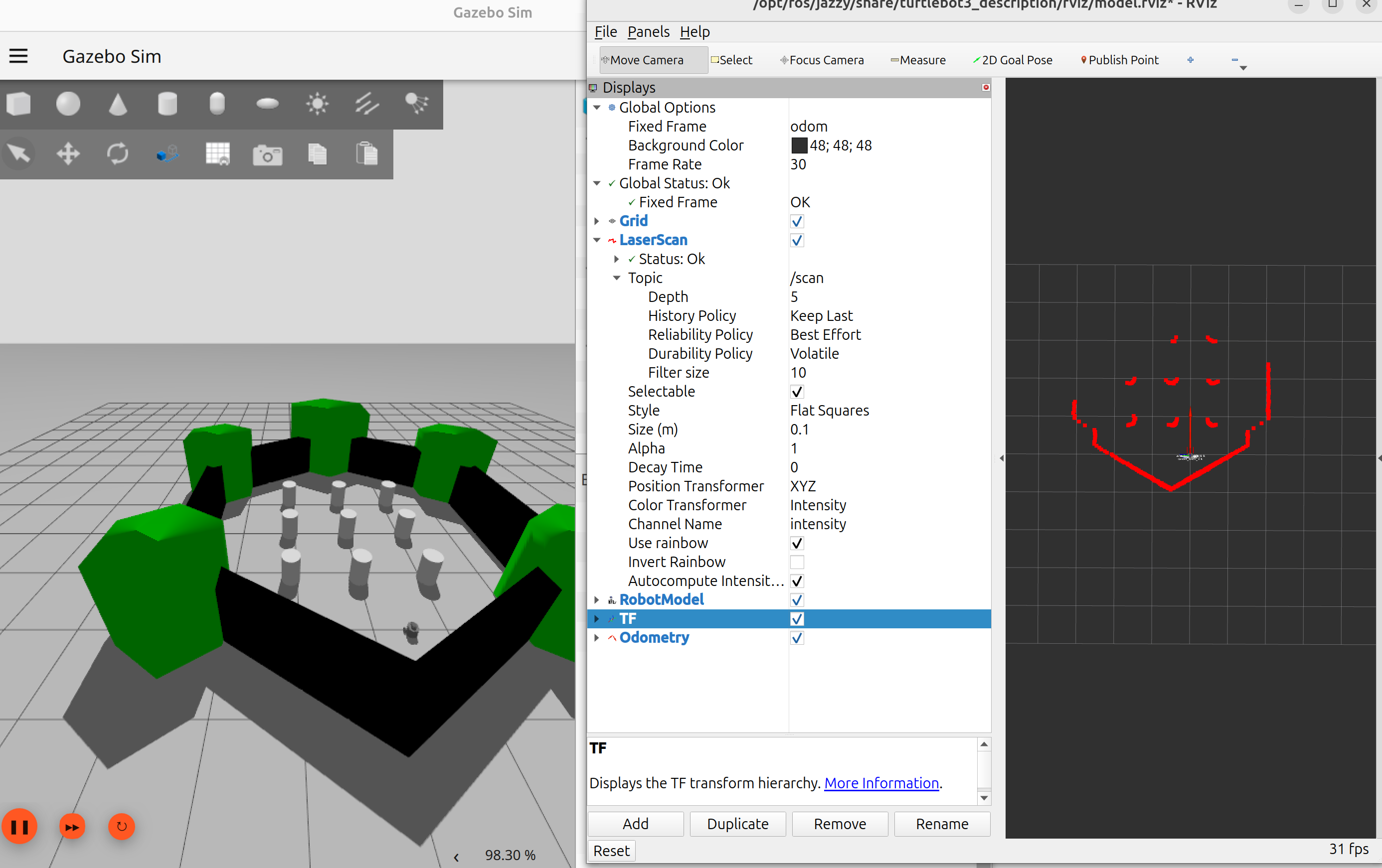
地图构建 在 ROS2 中,地图构建常用 SLAM(Simultaneous Localization and Mapping) 技术。其大概流程是: 传感器采集数据:可使用激光雷达(2D/3D LiDAR)或相机(VSLAM) 里程
相机 相机安装 sudo apt install ros-jazzy-usb-cam 可视化 run usb_cam usb_cam_node_exe --ros-args -p video_device:=/dev/video2 ros2 run rqt_image_vew rqt_image_view 上面的-p指定具体的摄像头,可以用v4l2-ctl …
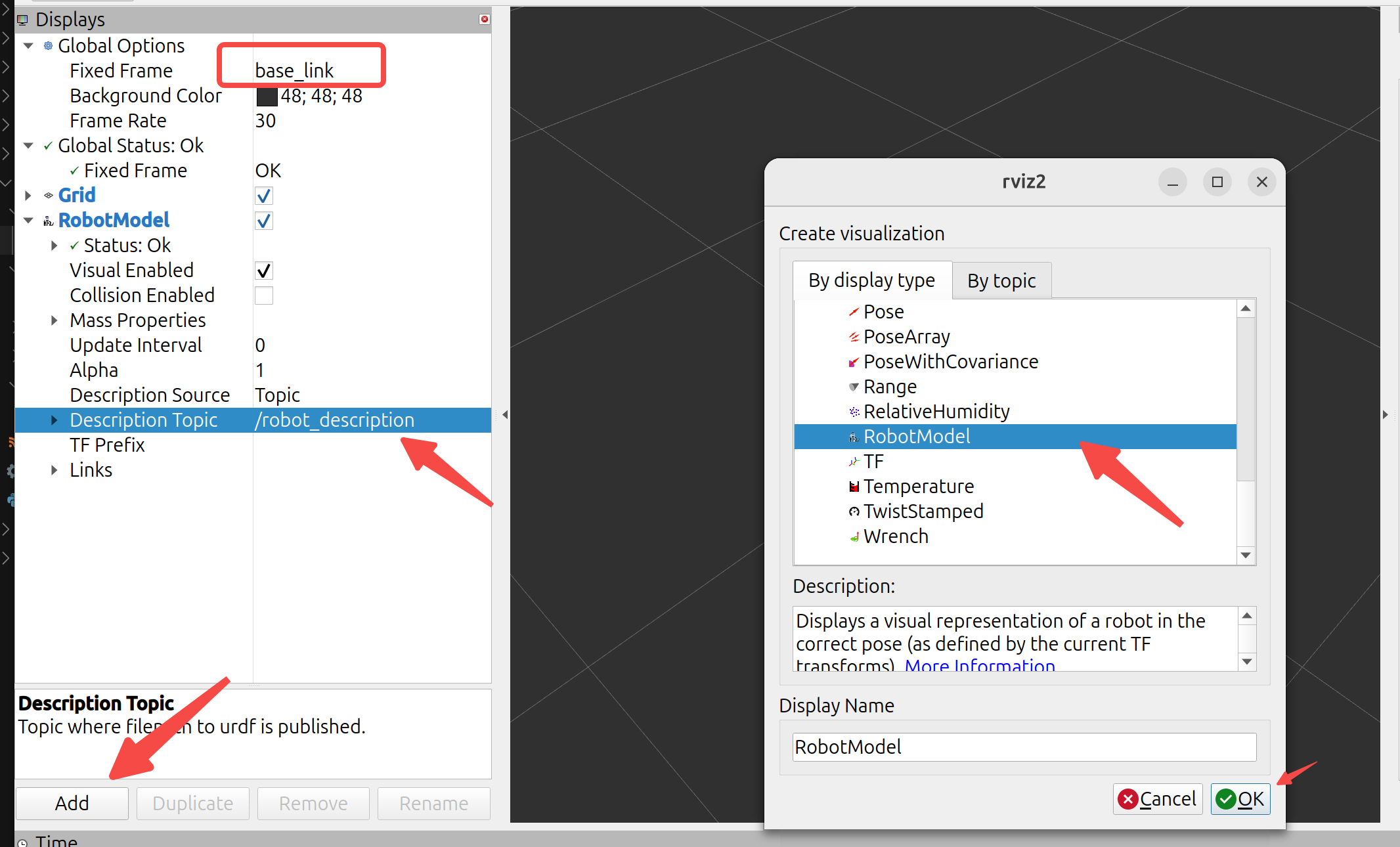
机器URDF模型 URDF 的全称是 Unified Robot Description Format(统一机器人描述格式)。它是 ROS / ROS2 系统里专门用来描述机器人结构和属性的一种 XML 格式文件。简单来说,URDF 就是“机器人说明书”,告诉 ROS
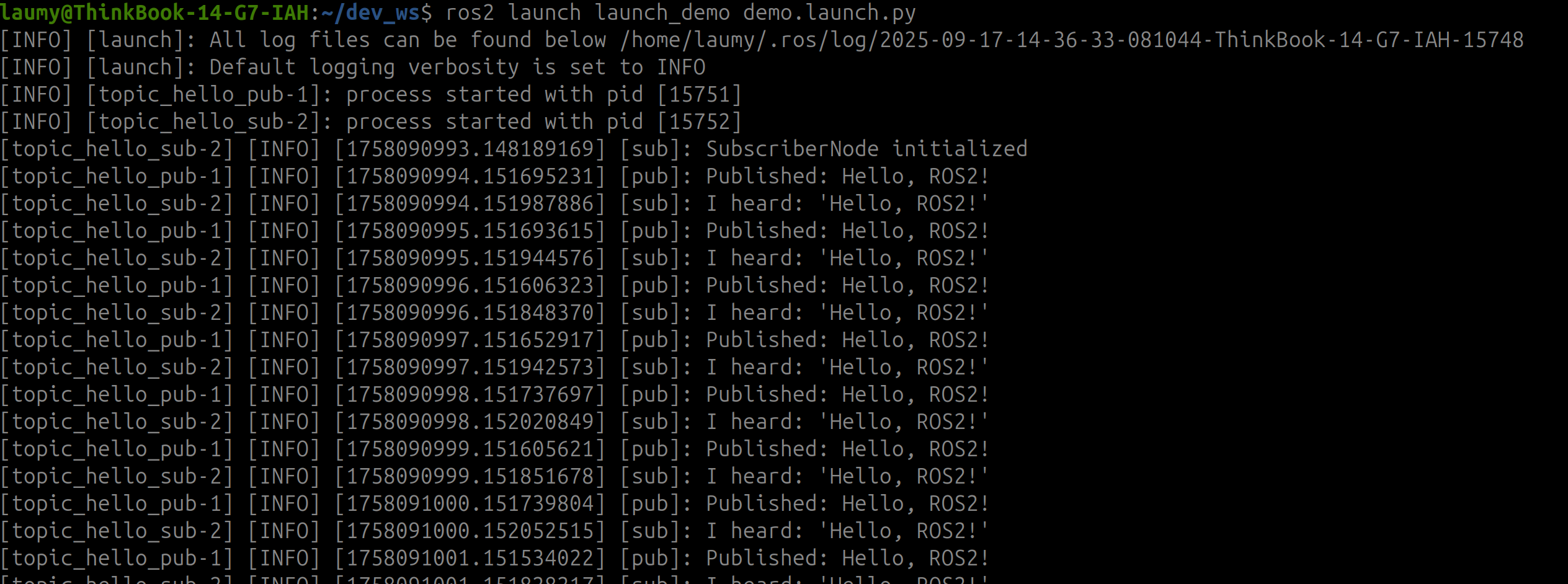
launch 在ROS2中,lauch是一个程序启动器,它的作用是一条命令可以启动多个节点,加载参数文件(YAML),重映射话题/服务/动作名称,条件启动(仿真/真机切换),嵌套调用其他lau
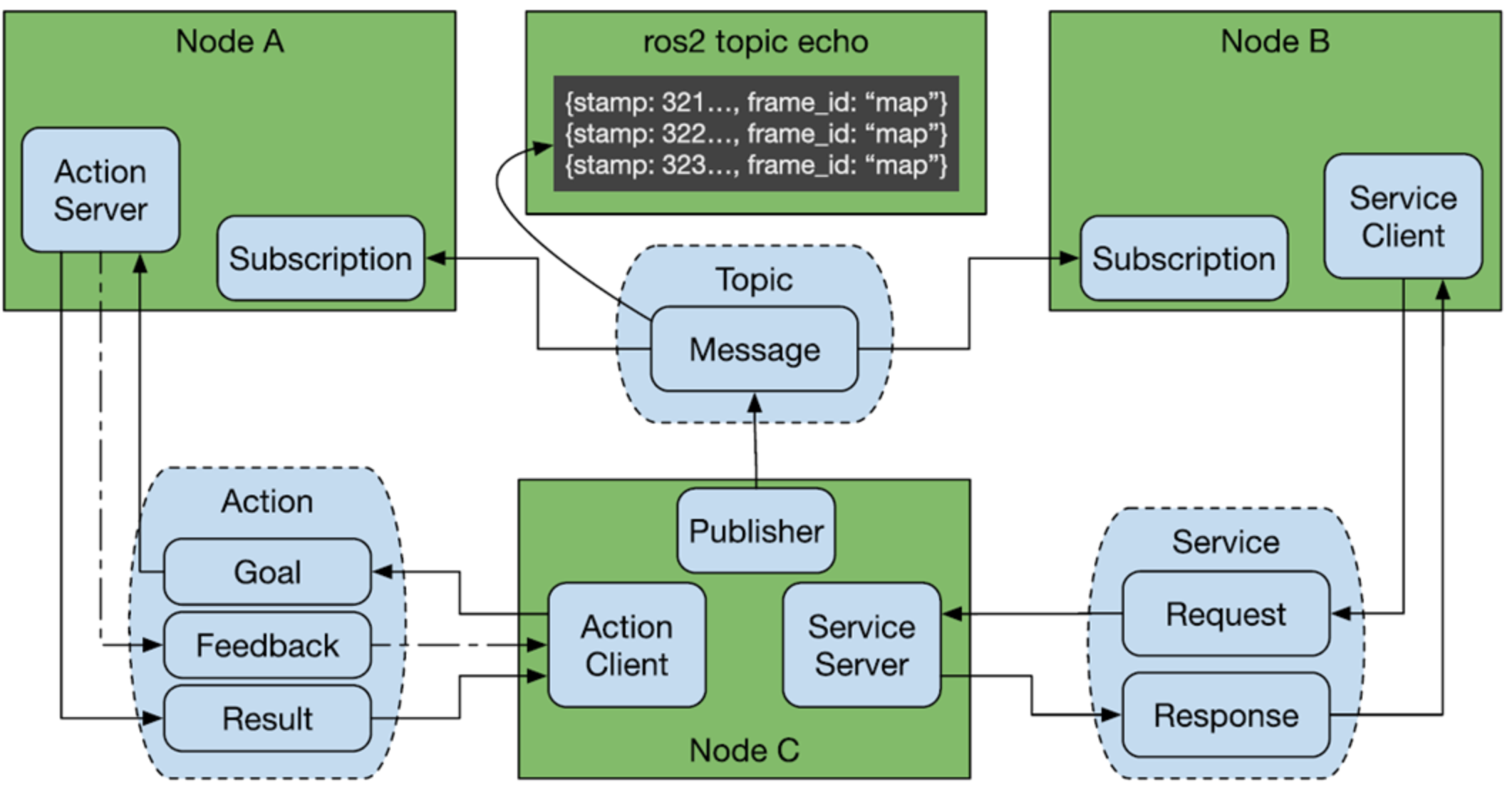
简介 在ROS系统每个节点可以理解为一个进程,更准确的说法它是一个包含了特定功能的独立执行单元。节点在ROS2中通常是一个可执行文件,负责执行特定的任务,如控制机器人、传感器数据处理
概述 最近发现ubuntu系统24.04.2的版本用着用着休眠熄屏后,突然登录不了,然后重启也进入不了桌面,显示如下: 按Ctrl + Alt + F3也进入不了tty控制台。 解决办法 重启系统进入