
本地智能竞争正在转向可治理闭环
核心观点 本周更值得连起来看的不是某一颗芯片、某一个模型或某一个 Agent 产品,而是端侧 AI、机器人世界模型、运行时和企业 Agent 权限开始同时向“可执行、可复用、可审计”的闭环收敛。一个可辩论的判
核心观点 本周更值得连起来看的不是某一颗芯片、某一个模型或某一个 Agent 产品,而是端侧 AI、机器人世界模型、运行时和企业 Agent 权限开始同时向“可执行、可复用、可审计”的闭环收敛。一个可辩论的判

准备 在ROS2中什么是包,什么是节点? 包(Package) 是 ROS 2 的基本构建单元,包含了代码、资源、配置和依赖,组织着机器人的各个功能模块。这个packge可以理解为openwrt的
前言 本文在unbuntu 24.04.2系统上搭建ROS2系统。 No LSB modules are available. Distributor ID: Ubuntu Description: Ubuntu 24.04.2 LTS Release: 24.04 Codename: noble 设置编码格式 locale # check for …
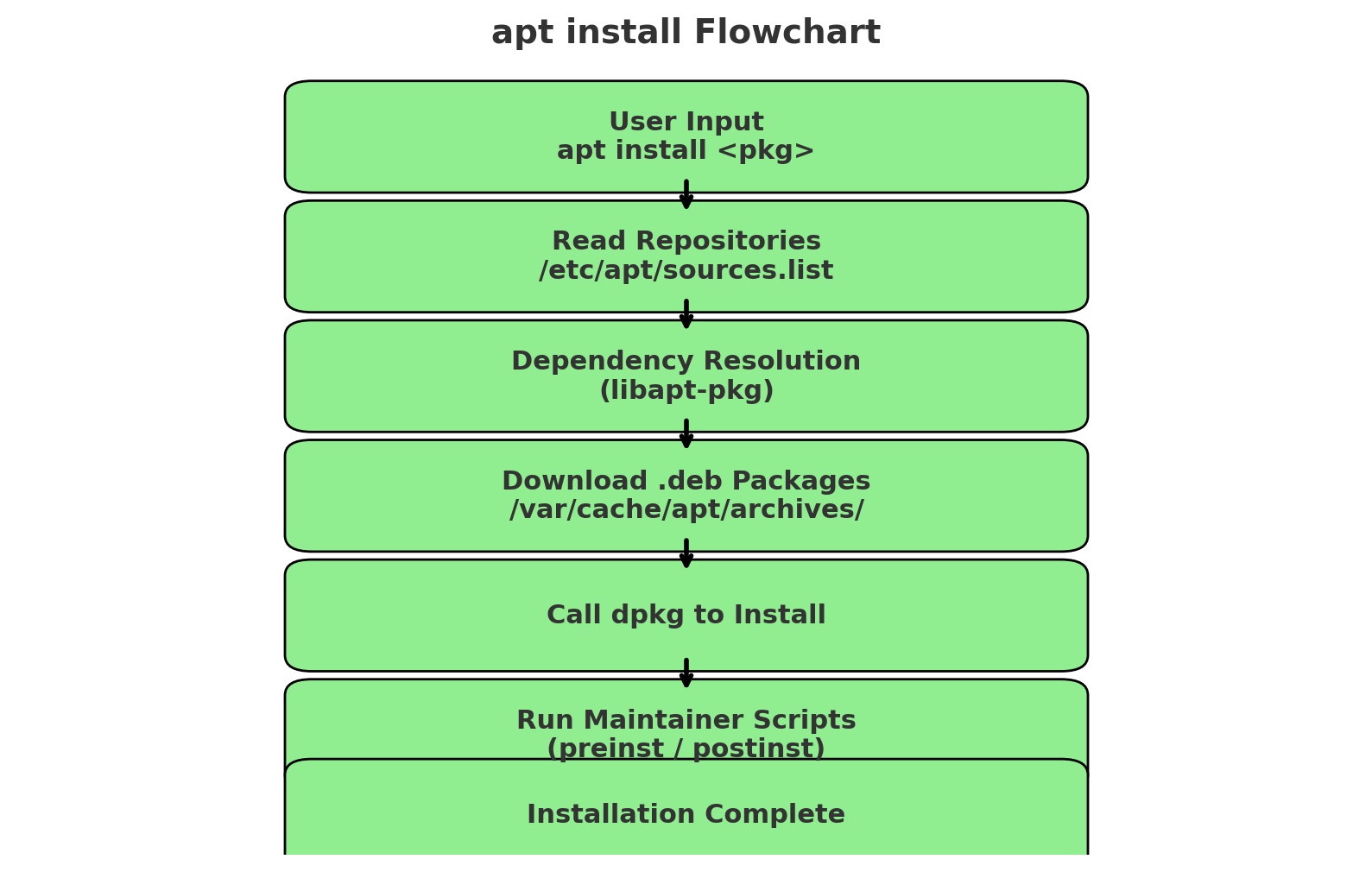
介绍 apt是ubuntu/debian的包管理工具,主要用于安装、更新、卸载和管理系统软件,他是对apt-get和apt-cache的简化整合,输出更直观。 常用的apt命令 sudo apt up
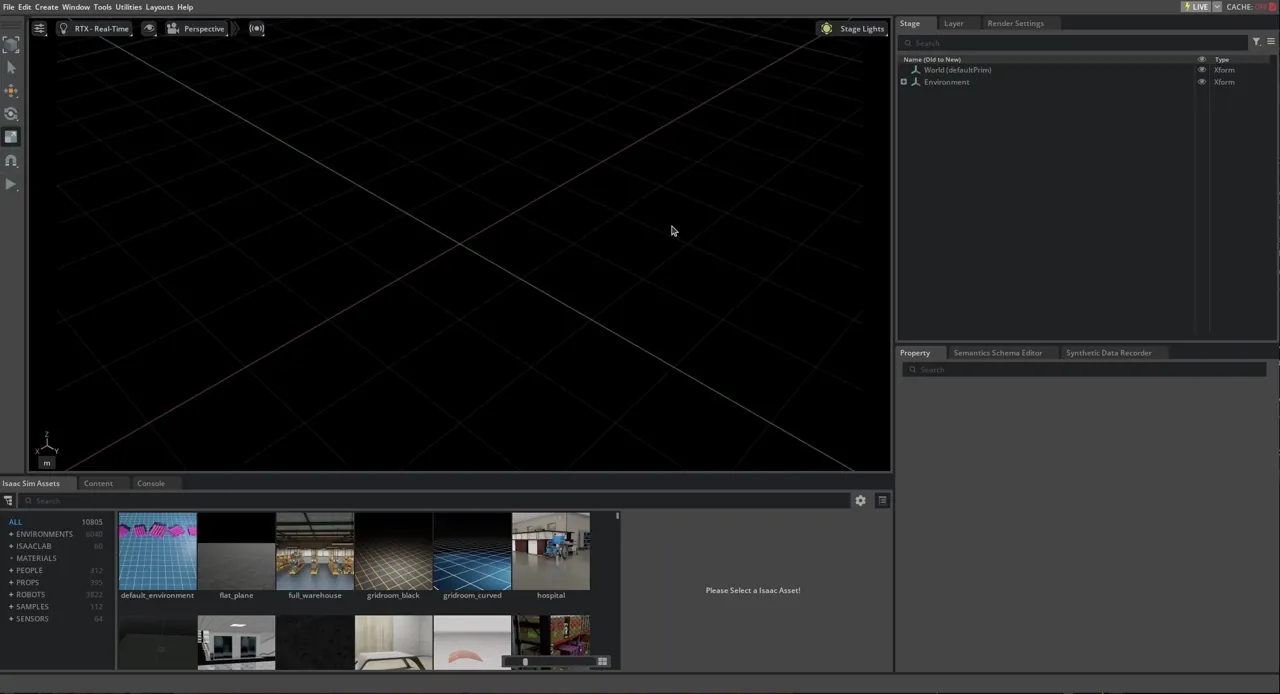
简介 如果是NVIDIA Isaac Sim的新用户,可以按照本文的两个示例来体验Isaac Sim。本文主要提供Isaac Sim基础使用教程、机器人基础教程。 在快速入门教程中,所有可通过 GUI 执行的
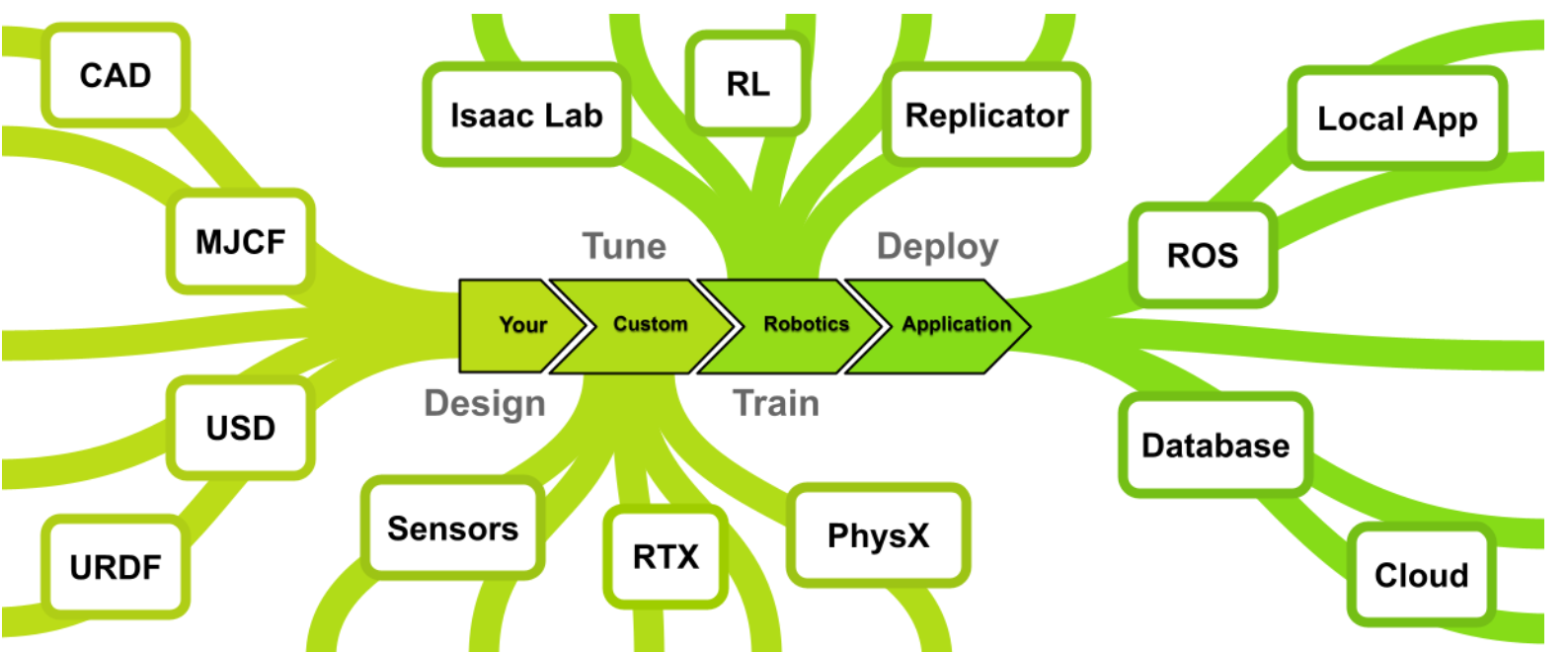
什么是isaac sim NVIDIA Issac Sim是一款基于NVIDIA omniverse构建的参考应用应用程序,使开发人员能够在基于物理的虚拟环境开发、模拟和测试AI机器人。 设计 Isaac Sim提供了一系列工
切换使用Xorg显示 之所以要切换Xorg显示是因为搜狗输入如果使用wayland显示,切到中文会一直闪烁,因此需要使用Xorg显示。 echo $XDG_SESSION_TYPE 先检查当前是那种图像绘画,如果打印是x11则
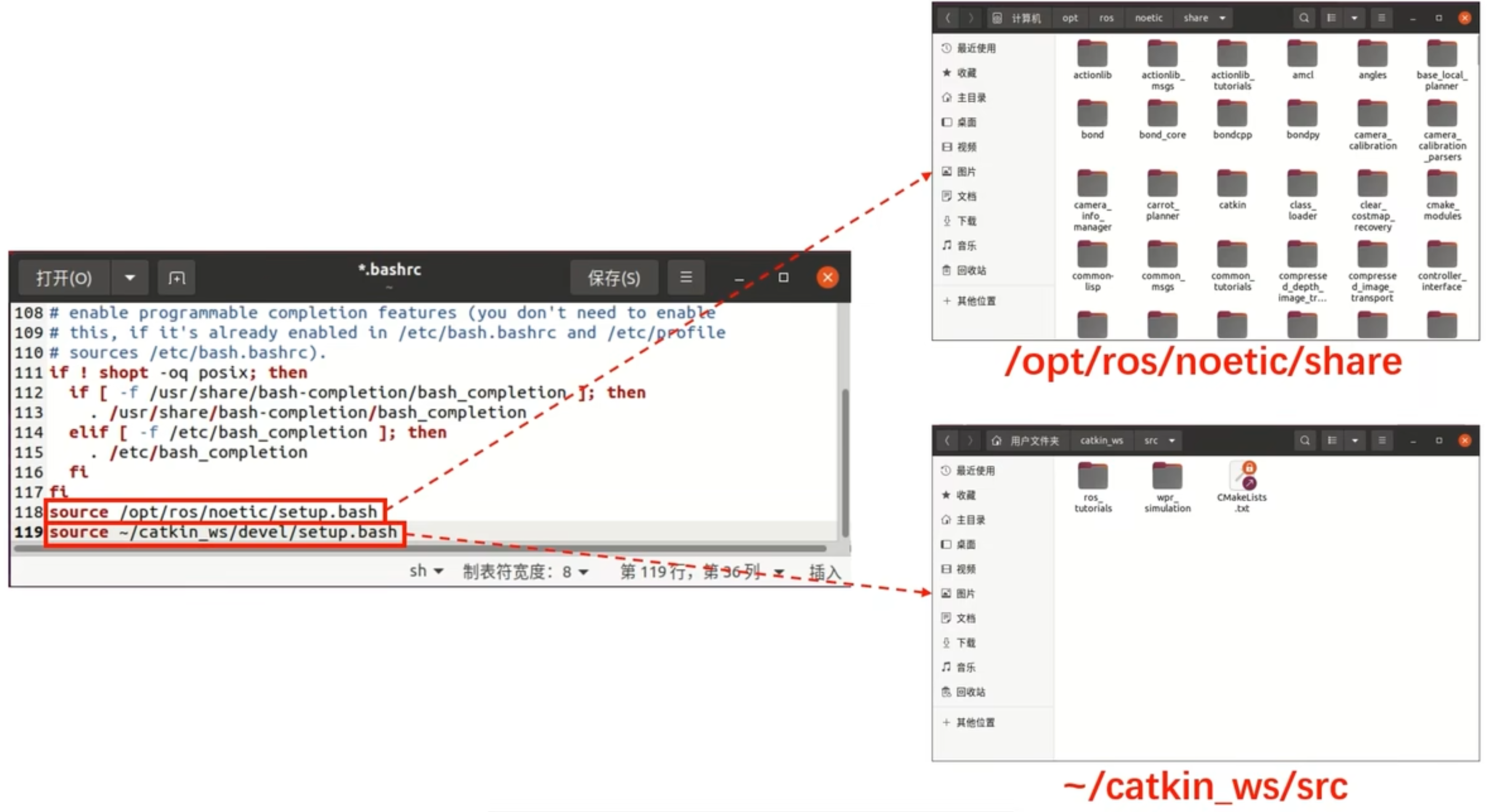
ROS的秘诀 梳理出有什么节点,每个节点的输入和输出是什么? 环境搭建 catkin vscode ROS插件、bracket pair colorizer 2 terminator sudo apt install terminator CRTL+ALT+T启动 CRTL+SHIFT+E左右分屏 CRTL+S
环境准备 sudo apt update sudo apt install build-essential dkms linux-headers-$(uname -r) sudo apt autoremove 卸载原驱动 sudo apt-get remove --purge '^nvidia-.*' sudo apt-get autoremove #重新生 …
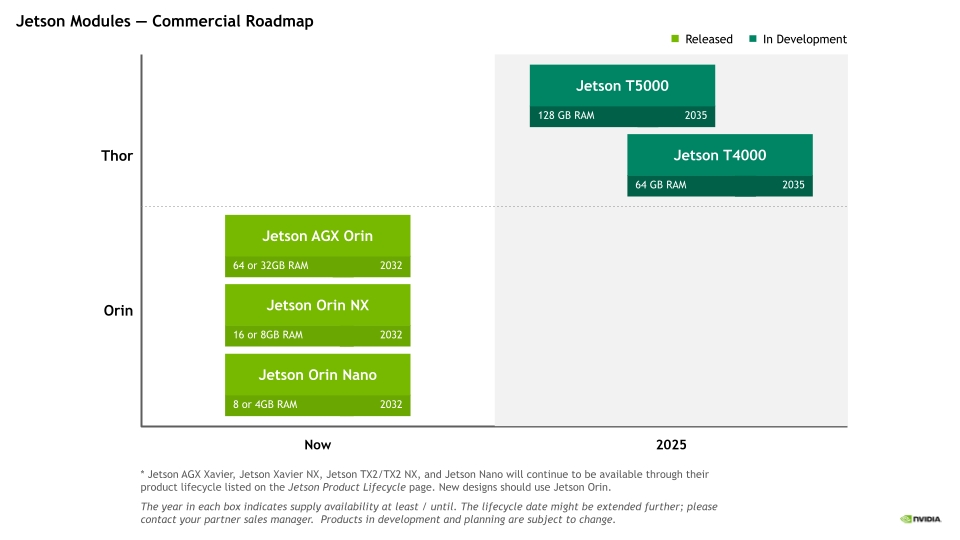
简介 NVIDIA Jetson平台提供用于开发和部署AI赋能机器人、无人机、IVA(Intelligent Video Analytics,智能视频)应用和自主机器的工具。在边缘生成式AI、NVIDIA M
环境准备 烧录镜像 下载NVIDIA jetson nano镜像,其镜像是基于ubuntu18.04修改。使用开源的balenaEtcher烧录器写到SD卡上,然后插卡启动 网络准备 买一个无线网卡然后