
本地智能竞争正在转向可治理闭环
核心观点 本周更值得连起来看的不是某一颗芯片、某一个模型或某一个 Agent 产品,而是端侧 AI、机器人世界模型、运行时和企业 Agent 权限开始同时向“可执行、可复用、可审计”的闭环收敛。一个可辩论的判
核心观点 本周更值得连起来看的不是某一颗芯片、某一个模型或某一个 Agent 产品,而是端侧 AI、机器人世界模型、运行时和企业 Agent 权限开始同时向“可执行、可复用、可审计”的闭环收敛。一个可辩论的判
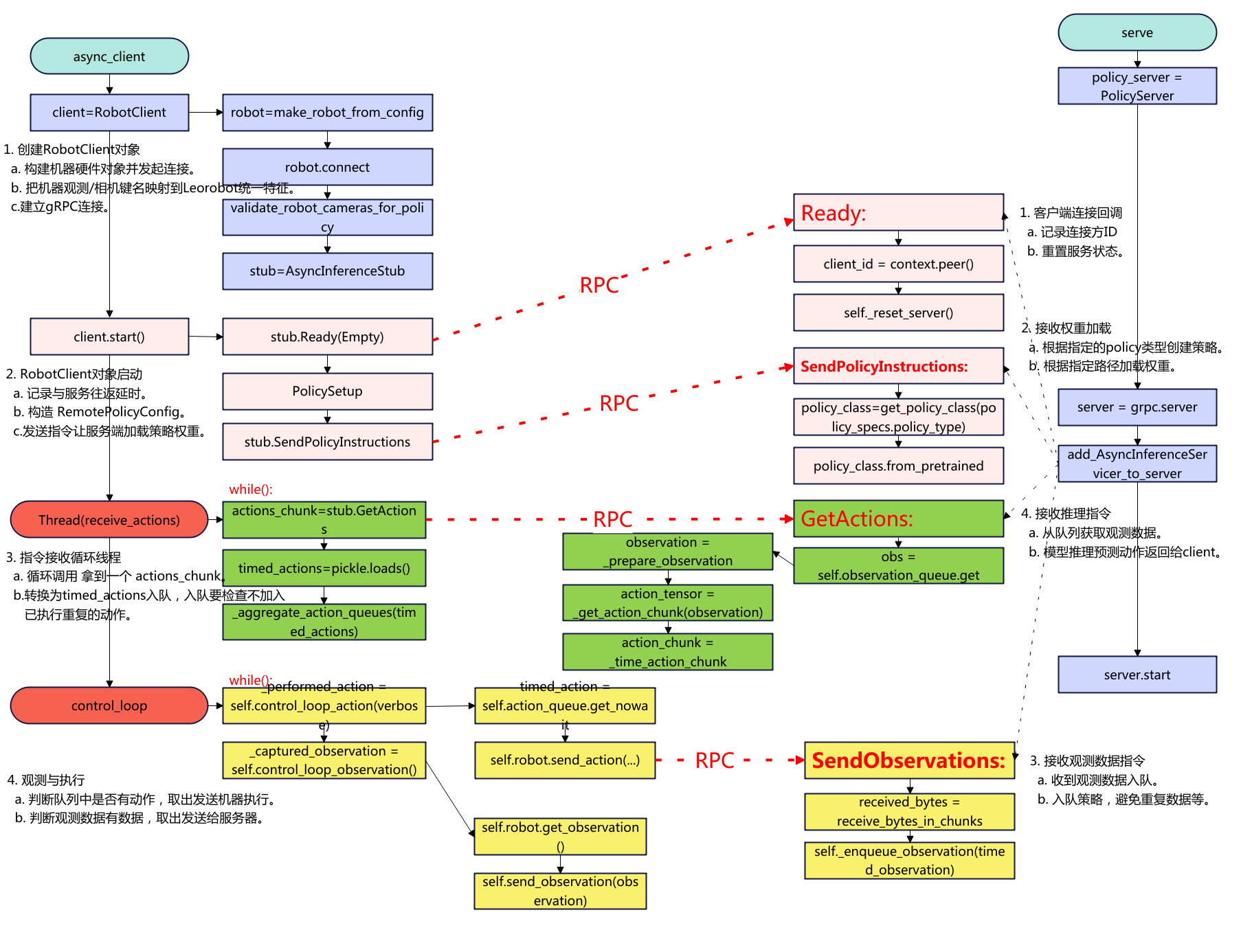
概述 本文记录lerobot smolvla异步推理实践,将SmolVLA的策略server部署到AutoDL上,真机client在本地笔记本上运行。 下面是代码的流程图: 环境准备 先登录
准备 下载同步的仓库 mkdir blog git clone git@github.com:laumy0929/wordpress-export-to-markdown.git git clone git@github.com:laumy0929/notes.git git clone …
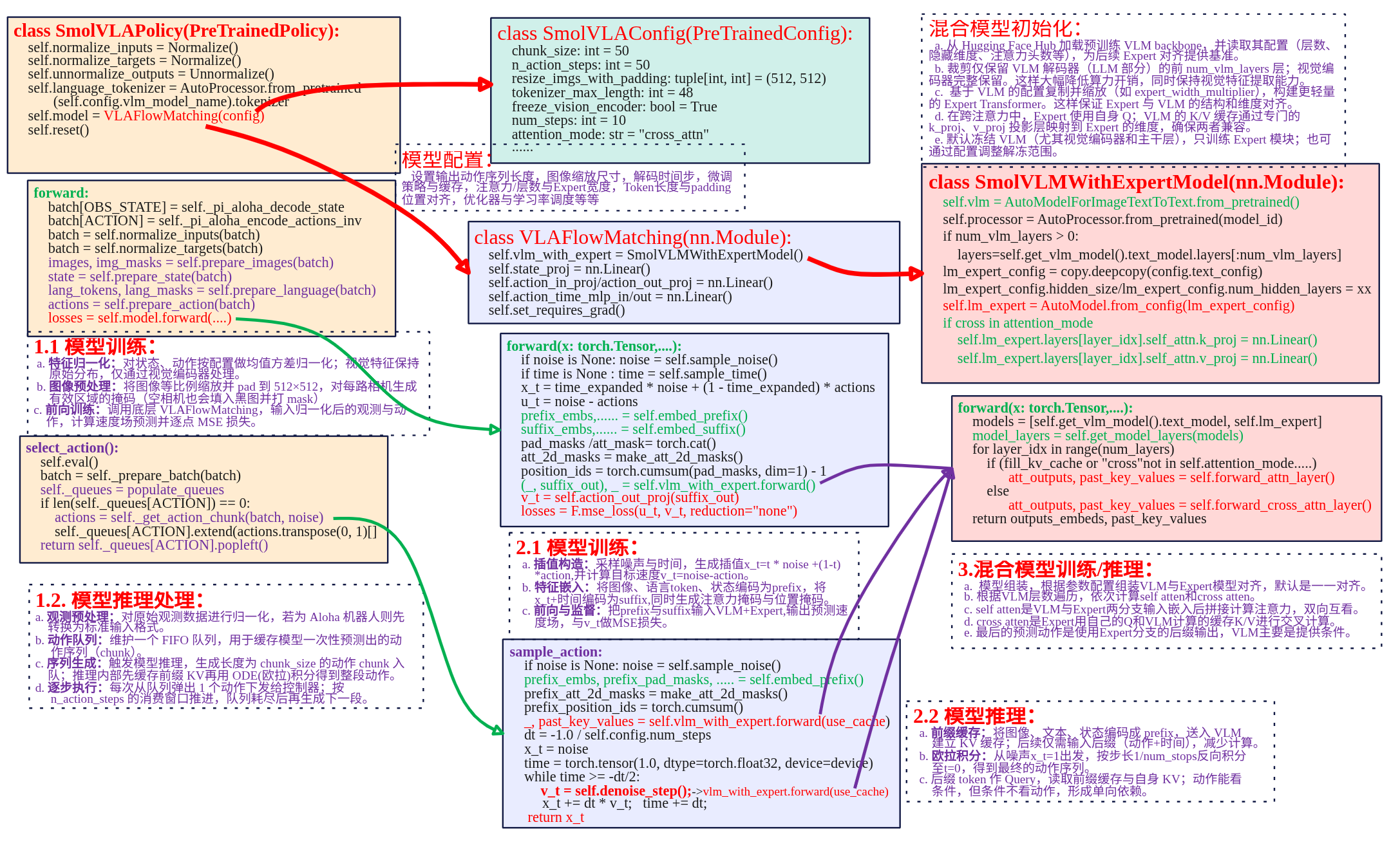
框架 本文主要对lerobot SmolVLA策略代码进行分析,下面是策略实现关键部分框图。 SmolVLAPolicay类封装向上提供策略的调用。SmolVLAConfig是对Smol
什么是插值 插值的核心问题是:在已知两个点的情况下,如何找到它们之间的中间点。 举个人走路的例子,起点在家门口(A点),终点在公司(B点),总的路程为1000米,假设人是匀速移动,如果
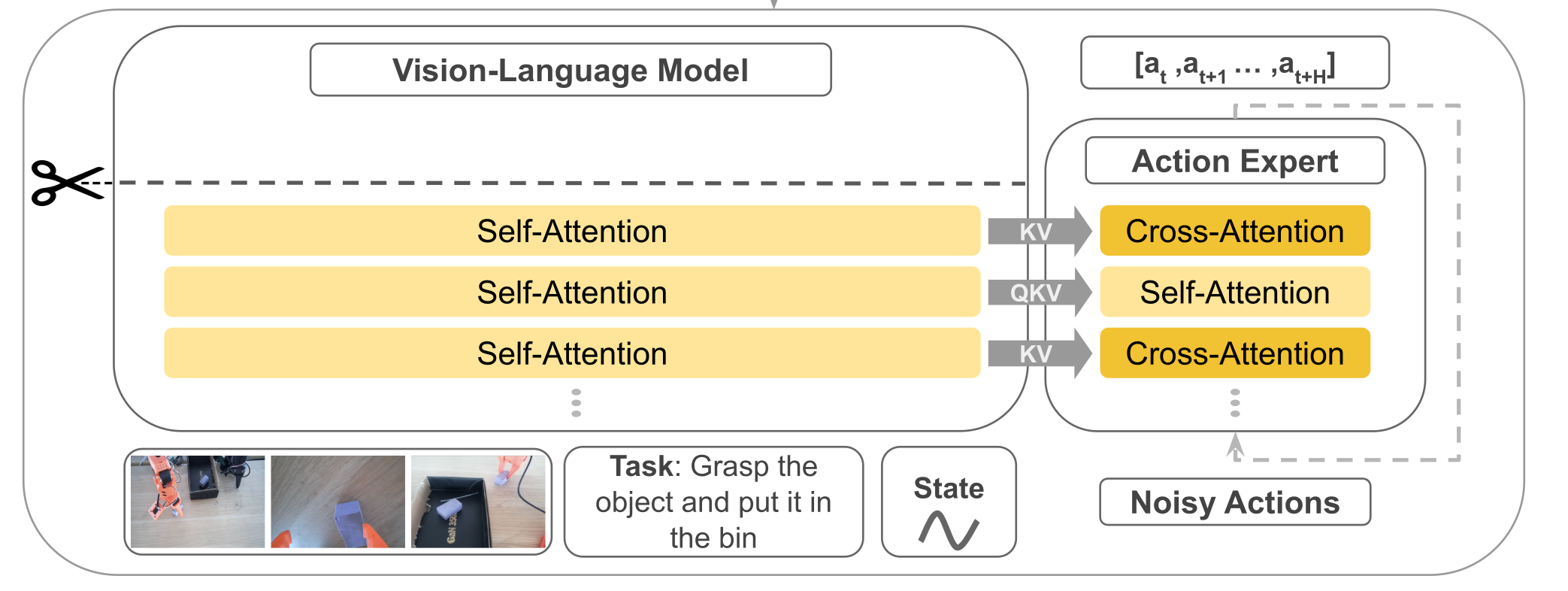
概述 SmolVLA 是一套轻量级视觉-语言-行动(VLA)策略:前端用小型 VLM(视觉 SigLIP + 语言 SmolLM2)做感知与理解;后端用一个“动作专家”专门预测一段连续的低层控制。它与Pi0相比,参数
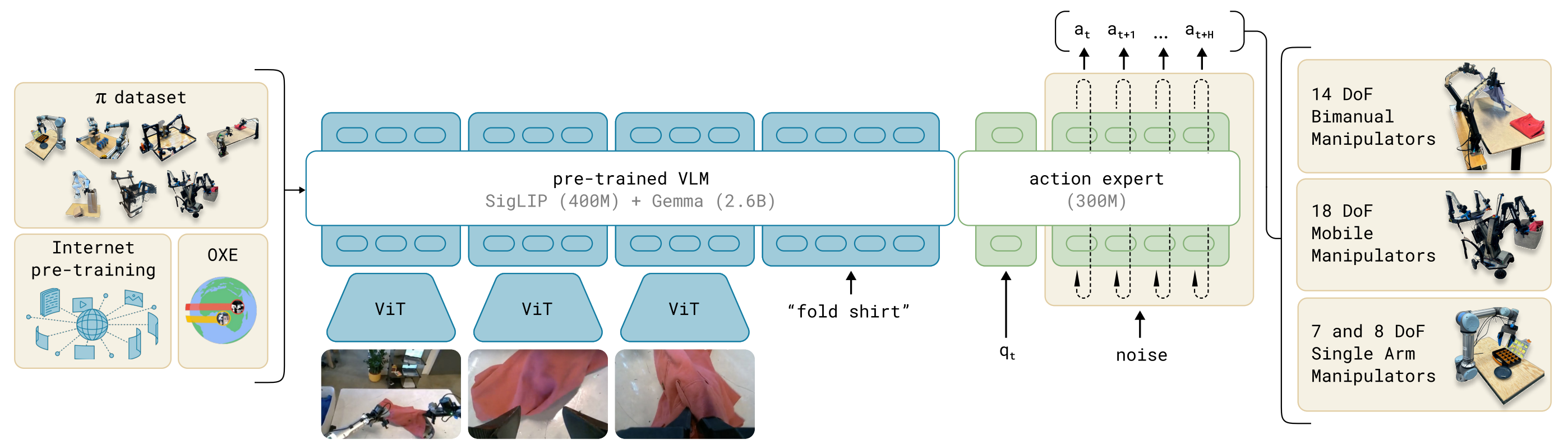
概述 传统机器人策略模型往往局限在单一任务或平台,难以跨场景泛化。与此同时,大规模 视觉-语言模型(VLM) 已展现出卓越的语义理解与任务指令解析能力。如果能将 VLM 的语义理解能力 与 Flow Matching 的连
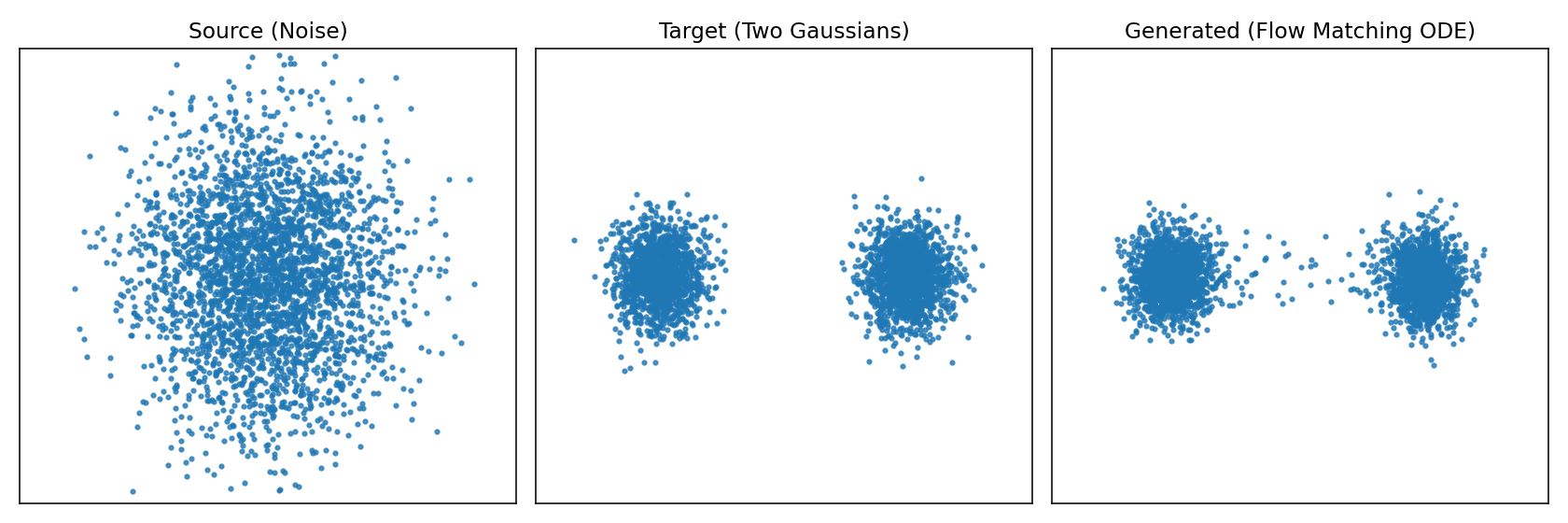
背景 上一篇文章分析了diffusion扩散模型。diffusion扩散模型做法是加噪声、再一步步去噪,训练过程复杂,还需要 carefully 设计噪声调度。 Flow Matching提出了更直接的方式:与其

概述 图像生成是当下研究的热点,diffusion是一种人工智能领域图像生成的基础模型,当下Stable diffusion、DALL·E、MidJourney文生图模型的基座都使用了
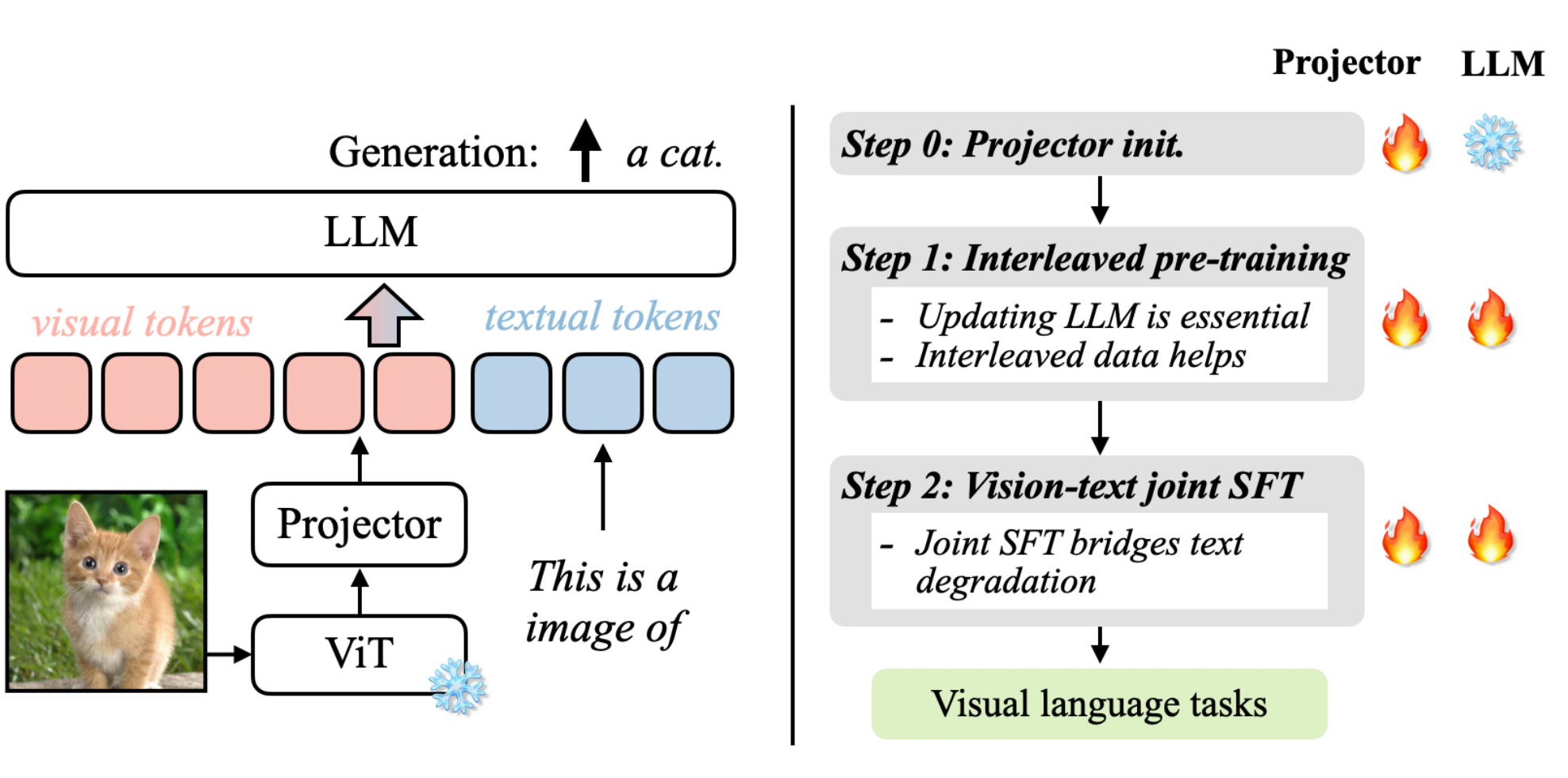
VLM与LLM 如果说我们有一张图片、一个图表想让大模型来帮忙理解那应该要怎么实现了? 标准的LLM语言大模型只能处理文本序列,是不能够读取图像的,如果没有办法将视觉的数据转换为LLM
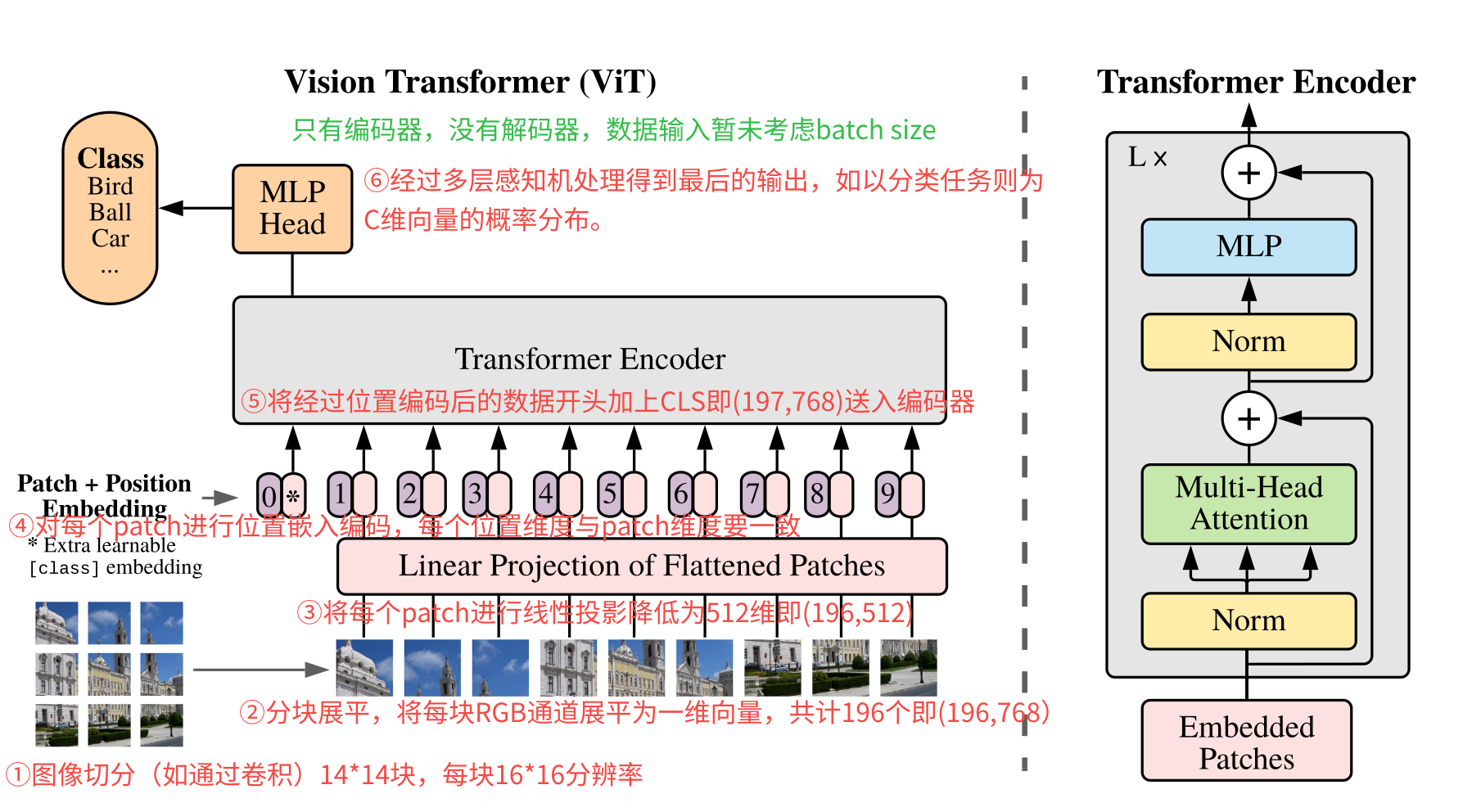
背景 计算机视觉领域,一直都是卷积天下。传统的卷积神经网络(CNN)依赖于卷积核提取局部特征,效果很好,但是也有一些不足,如需要人工设计卷积结构包括卷积核大小和层数,另外就是难以捕捉