
端侧AI芯片的胜负正在转向整机化凭证
核心观点 端侧 AI 芯片竞争正在从“单颗 SoC 能提供多少 TOPS”,转向“这颗芯片能否被验证为一个可交付、可维护、可认证的整机系统”。Qualcomm Dragonwing IQ10 RRD、NVIDIA Jetson T4000、后
核心观点 端侧 AI 芯片竞争正在从“单颗 SoC 能提供多少 TOPS”,转向“这颗芯片能否被验证为一个可交付、可维护、可认证的整机系统”。Qualcomm Dragonwing IQ10 RRD、NVIDIA Jetson T4000、后
环境安装 pip install -e ".[smolvla]" 在原来lerobot的环境基础上。 启动训练 本文主要是记录复现lerobot smolvla策略的效果,为了快速看到效果,这里不进行采集数据了,直接用此前ACT采集的数
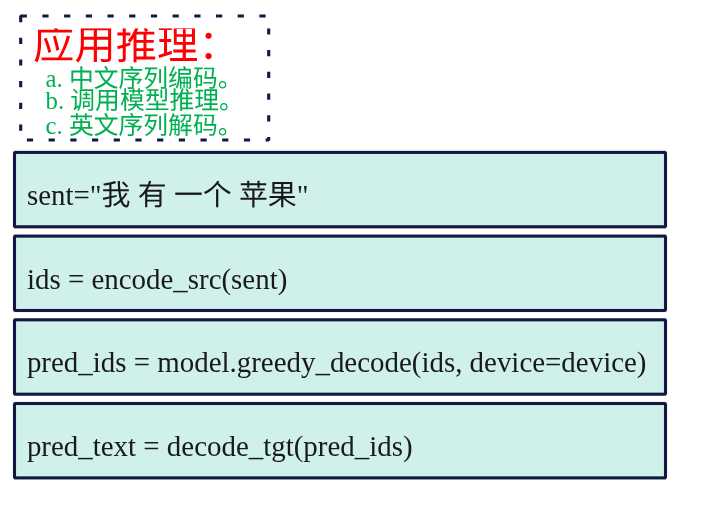
概述 在http://www.laumy.tech/2458.html#h37章节中,介绍了transformer的原理,本章用pytorch来实现一个将"我有一个苹果&q
简介 Dataset和DataLoader在pytorch中主要用于数据的组织。这两个类通常一起搭配处理深度学习中的数据流。 Dataset 用于产出“单个样本”:定义怎么按索引取到一个样本,以及总
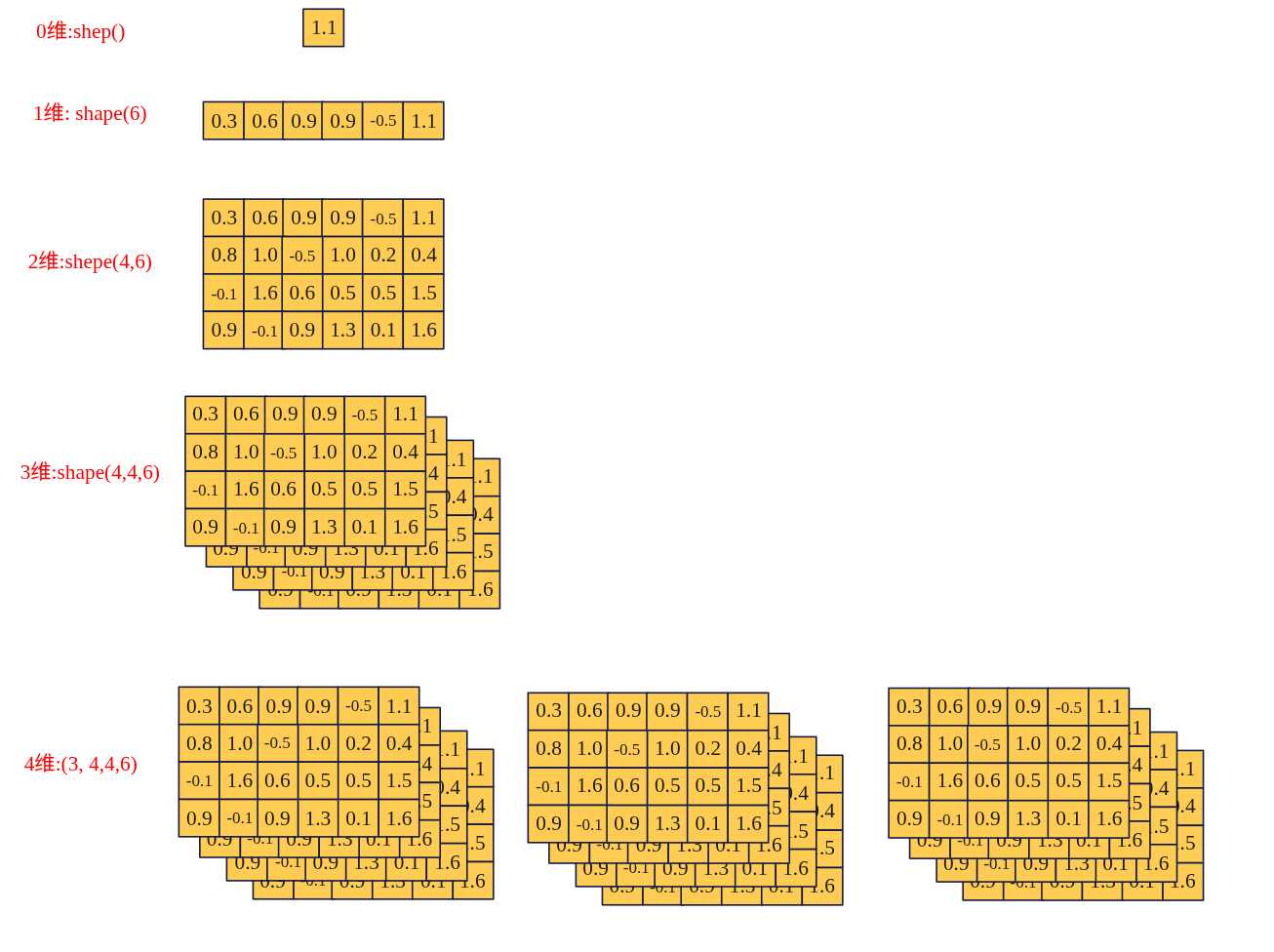
维度是什么 维度=数据需要“几个”索引才能定位到一个元素,也叫做轴数(axis)或阶(rank)。 可以看成"套盒子"的层数,盒子里面装盒子,再装数字。每多一层外括

概述 框架 以翻译作为例子,从宏观角度理解大模型,可以把大模型视为一个黑匣子,它可以输入一种语言然后输出另外一种翻译语言,如下图所示。 如果将模型稍微展开一下,模型分为encoders和
SLAM 2D 激光:slam_toolbox (1)安装启动 sudo apt update sudo apt install ros-jazzy-slam-toolbox ros2 launch slam_toolbox online_async_launch.py (2)输入输出 ros2 node info /slam_toolbox …
配置类ACTConfig @PreTrainedConfig.register_subclass("act") @dataclass class ACTConfig(PreTrainedConfig): # 输入/输出结构 chunk_size: int = 100 # 动作块长度(每次预测的动作序列长度) n_action_steps: int = 100 …
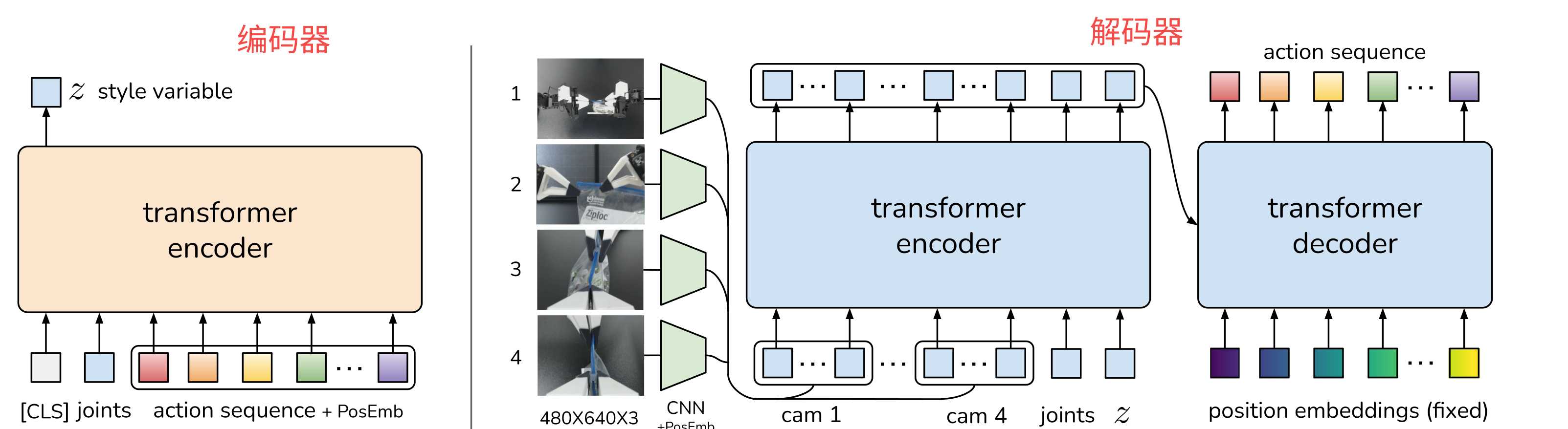
基本原理 简单总结一下什么是ACT算法。传统的机器算法过程是观测关节位置J1经过模型预测动作A2然后执行,观测到J2预测数A3,观测到J3遇到A4依次类推,这样就有一个问题,假设预测
学习率调度器简介 是什么 学习率调度器(Learning Rate Scheduler)是深度学习训练中动态调整优化器学习率的工具(注意是在优化器的基础上动态调整学习率),通过优化收敛过程提升模
torch.optim简介 在学校lerobot的策略优化器前,我们先再复习一下什么是优化器。 什么优化器 优化器官方解释就是在深度学习中让损失函数通过梯度下降思想逐步调整参数以达到最小