
端侧AI芯片的胜负正在转向整机化凭证
核心观点 端侧 AI 芯片竞争正在从“单颗 SoC 能提供多少 TOPS”,转向“这颗芯片能否被验证为一个可交付、可维护、可认证的整机系统”。Qualcomm Dragonwing IQ10 RRD、NVIDIA Jetson T4000、后
核心观点 端侧 AI 芯片竞争正在从“单颗 SoC 能提供多少 TOPS”,转向“这颗芯片能否被验证为一个可交付、可维护、可认证的整机系统”。Qualcomm Dragonwing IQ10 RRD、NVIDIA Jetson T4000、后
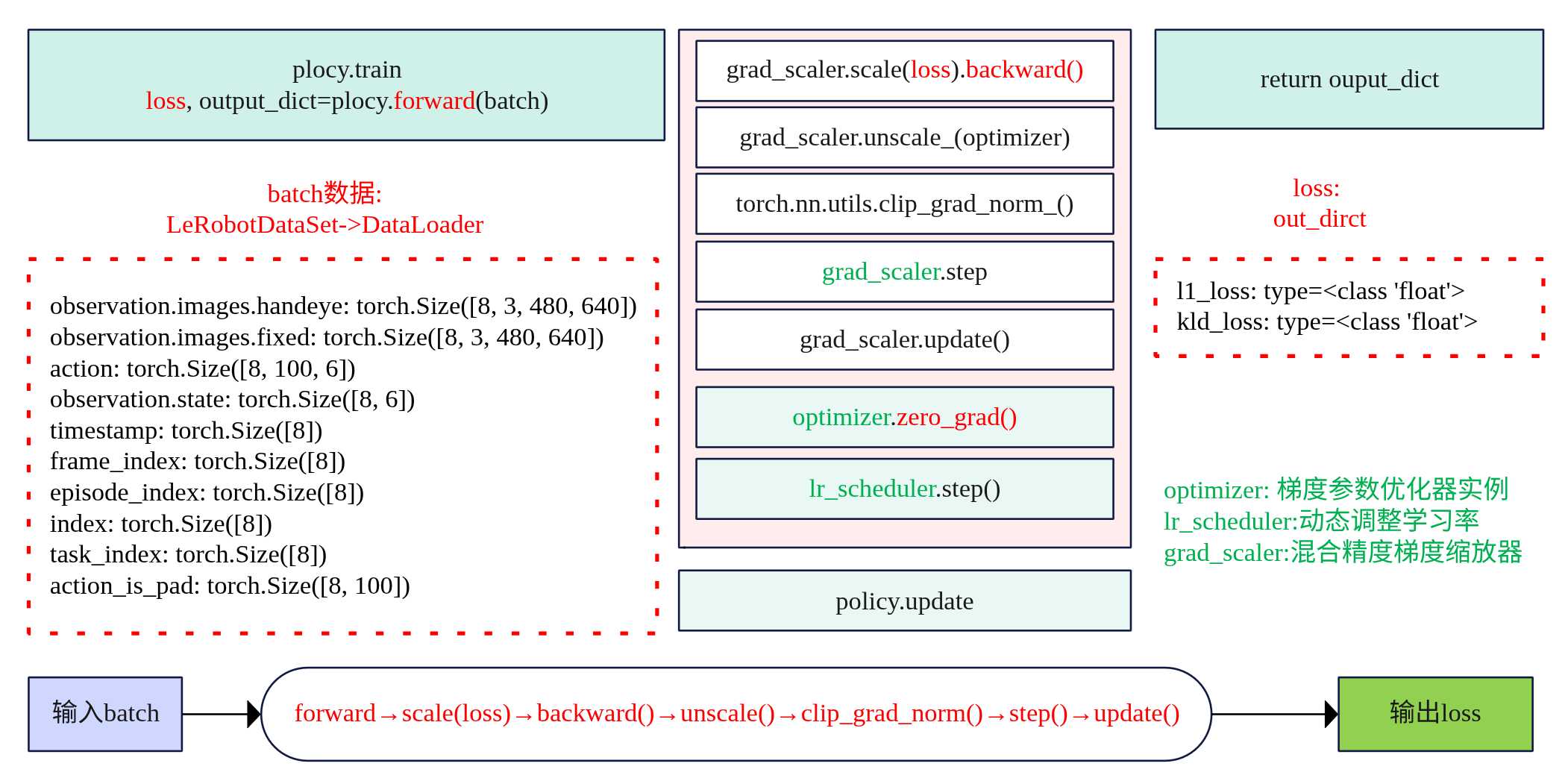
初始化 @parser.wrap() def train(cfg: TrainPipelineConfig): cfg.validate() # 验证配置合法性(如路径、超参数范围) init_logging() # 初始化日志系统(本地文件+控制台输出) if cfg.seed is not None: set_seed(cfg.seed) # 固定随机种 …
简介 lerobot record是关键核心流程,其包括了数据的采集和模型推理两部分。 如果是数据采集模式,命令启动如下 python -m lerobot.record \ --robot.disable_torque_on_disconnect=true \ --robot.type=so101_follower \ …
装饰器 函数装饰器 什么是装饰器 装饰器是python的一种高级语法,本质上是函数包装器,可以在不修改函数代码的前提下为函数添加额外功能如日志记录、性能计时、权限校验,也可以修改函数的输
启动 示教的功能主要是主臂控制,从臂跟随,在数据采集是非常的一环。下面是模块启动的执行命令: python -m lerobot.teleoperate \ --robot.type=so101_follower \ --robot.port=/dev/ttyACM0 \ --robot.id=R12252801 \ …

手机给电脑配置 手机设置 打开设置 设置IP地址,启用共享,注意这个ip地址设置跟电脑同一个局域网。 通过上面的步骤,手机的就启动的代理设置了代理服务为:192.168.0.29:1082
why calibrate 先来看看标定后的数据 { "shoulder_pan": { #肩部旋转关节 "id": 1, "drive_mode": 0, "homing_offset": -1620, "range_min": 1142, "range_max": 2931 }, "shoulder_lift": { #肩部升降关节 "id": 2, …
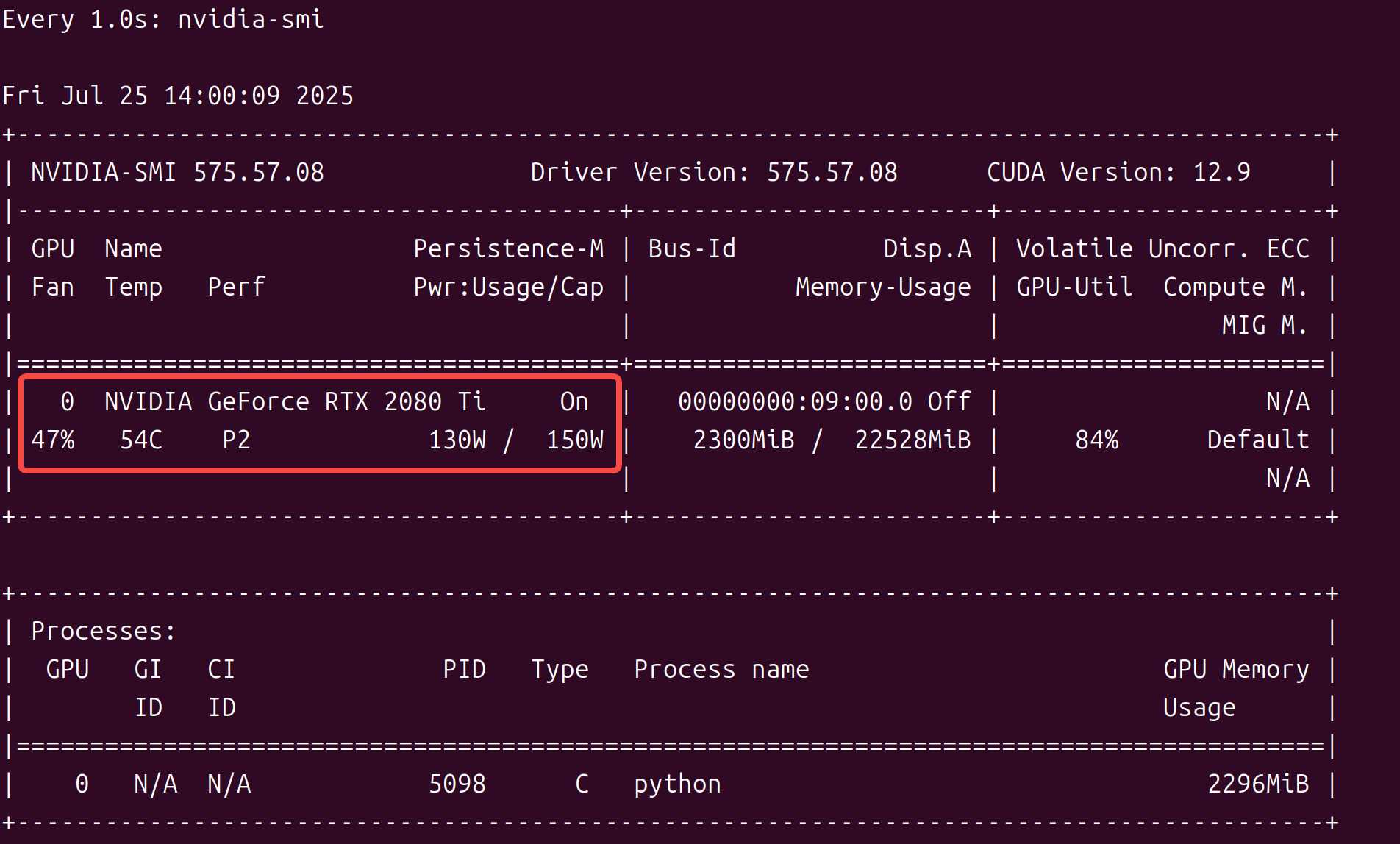
问题 当前使用的是魔改版的NVIDIA 2080 Ti 22G显卡,发现在模型训练过程中,跑着跑着就报错了,具体如下: raceback (most recent call last): File "/home/laumy/lerobot/./src/lerobot/scripts/train.py", line 291, in <module> …
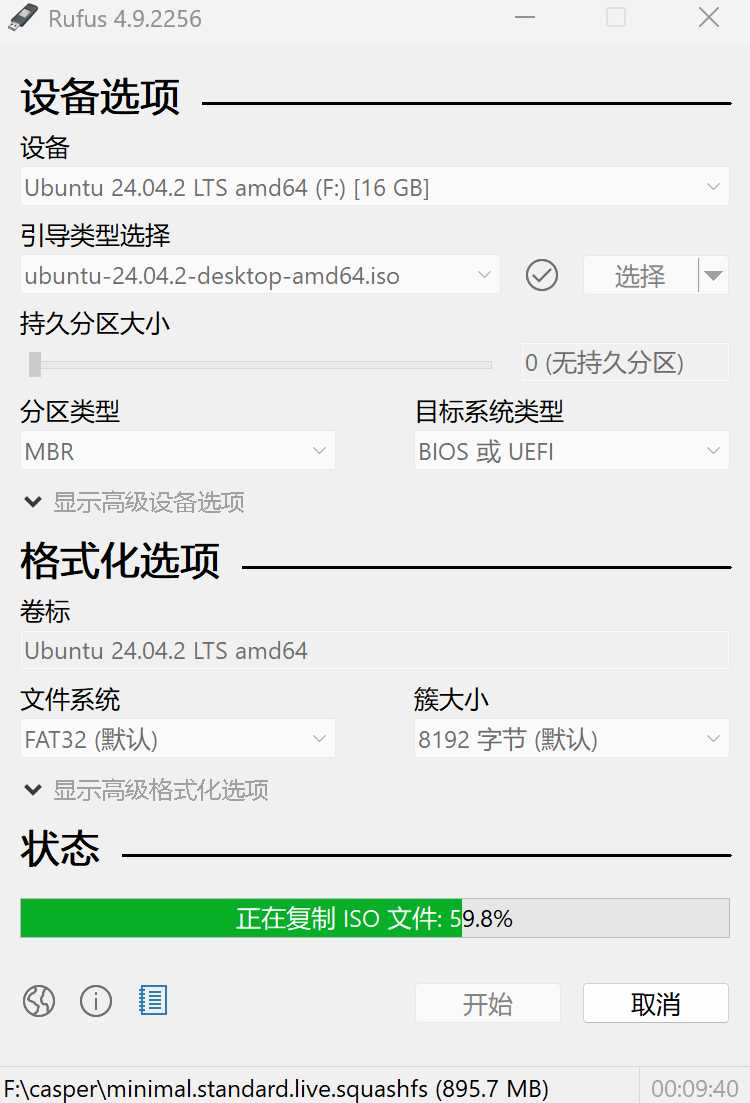
准备 本文只作为个人安装简单记录,不做详细过程,如果是新手,可不必花时间再往下阅读。 准备一个16G以上的U盘,安装过程中跟实际的笔记本硬件会差异比较大。 下载ubuntu镜像 先下载ub
设备查询 本文是记录ubuntu系统lerobot试验的快捷命令,方便开始负责执行设备,不会介绍为什么? python -m lerobot.find_port sudo chmod +666 /dev/ttyACM0 /dev/ttyACM1 python -m lerobot.find_cameras 机器标定 从臂标定 python -m …
加载准备 初始化ONNXRuntime环境 Ort::Env env(ORT_LOGGING_LEVEL_WARNING, "YOLOv5Inference"); Ort::Env 是 ONNX Runtime C++ API 中用于初始化运行环境的类,有多个重载的构造函数,下面是一个构造函数原型及参数作用如下。 Ort::Env( …