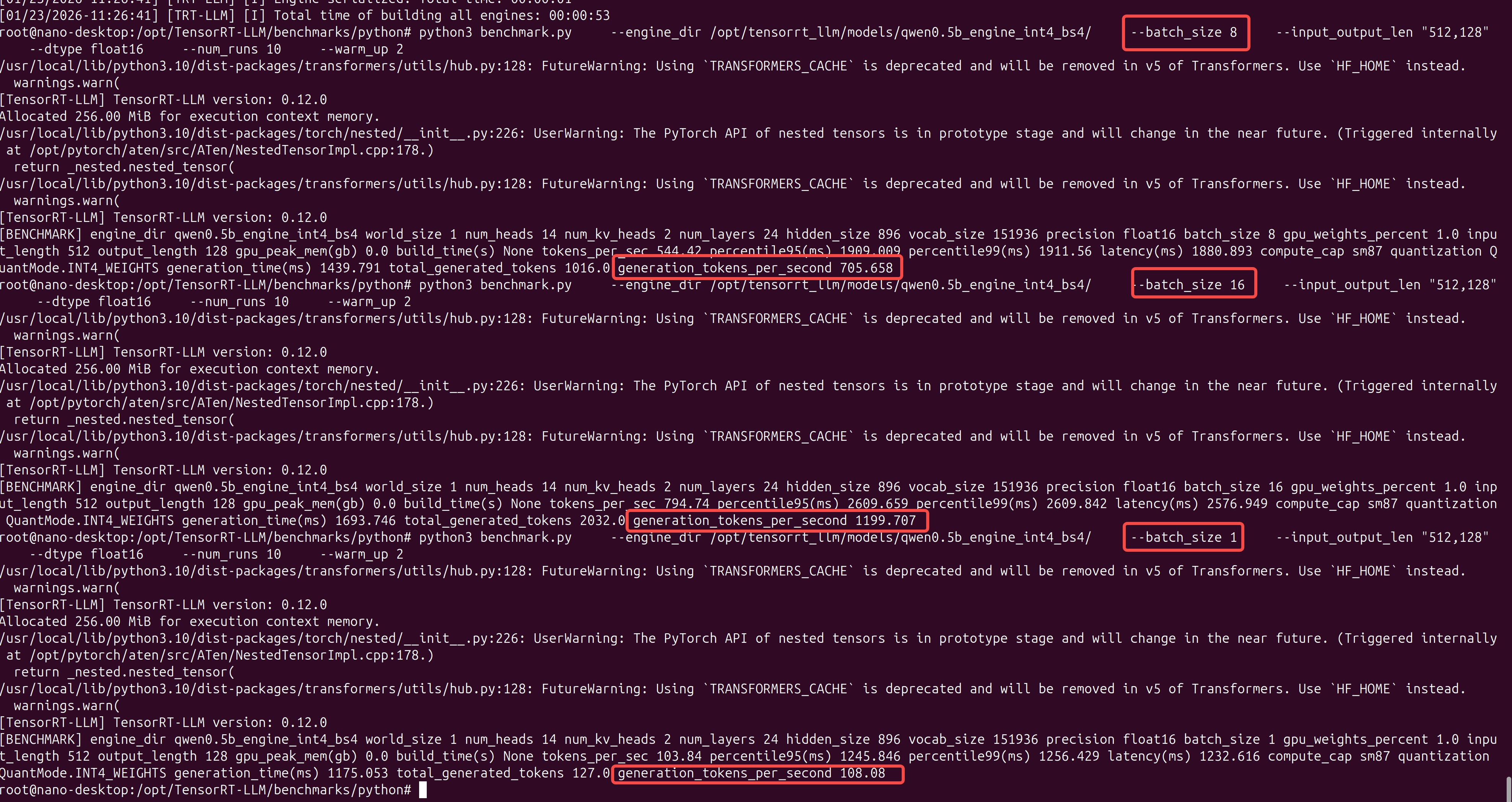
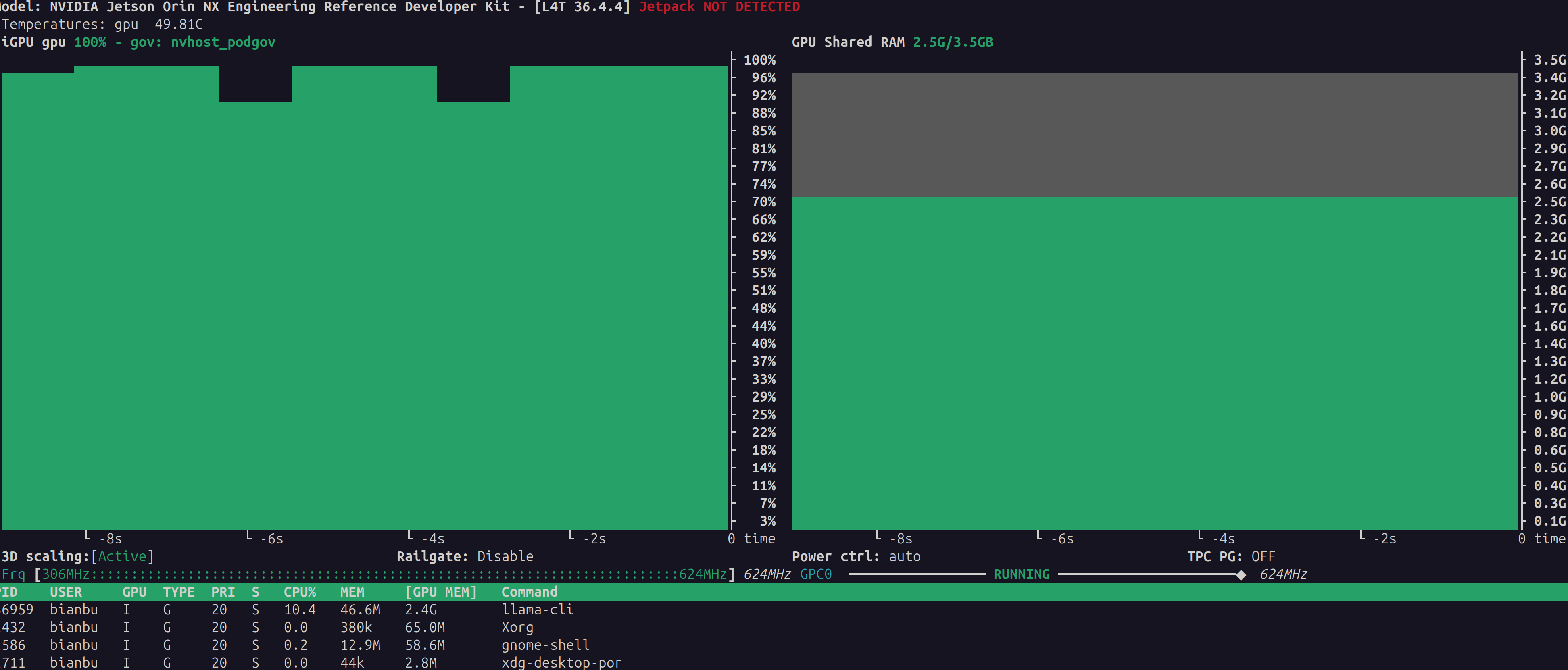
jetson orin nano使用TensorRT-LLM跑大模型
准备 硬件信息 硬件信息如下: sudo cat /proc/device-tree/model NVIDIA Jetson Orin NX Enginejetson_releasee Developer Kit(base) nano@nano-desktop:~$ jetson_release Software part of jetson-stats …
准备 硬件信息 硬件信息如下: sudo cat /proc/device-tree/model NVIDIA Jetson Orin NX Enginejetson_releasee Developer Kit(base) nano@nano-desktop:~$ jetson_release Software part of jetson-stats …
安全说明:本文是本地 AI 推理开发笔记,只记录 Jetson Orin Nano 上的 CUDA 环境检查、llama.cpp 官方源码编译、开源 GGUF 模型测试和性能观察。页面不提供可执行安装包,不要求输入账号、密码、支付信息或任
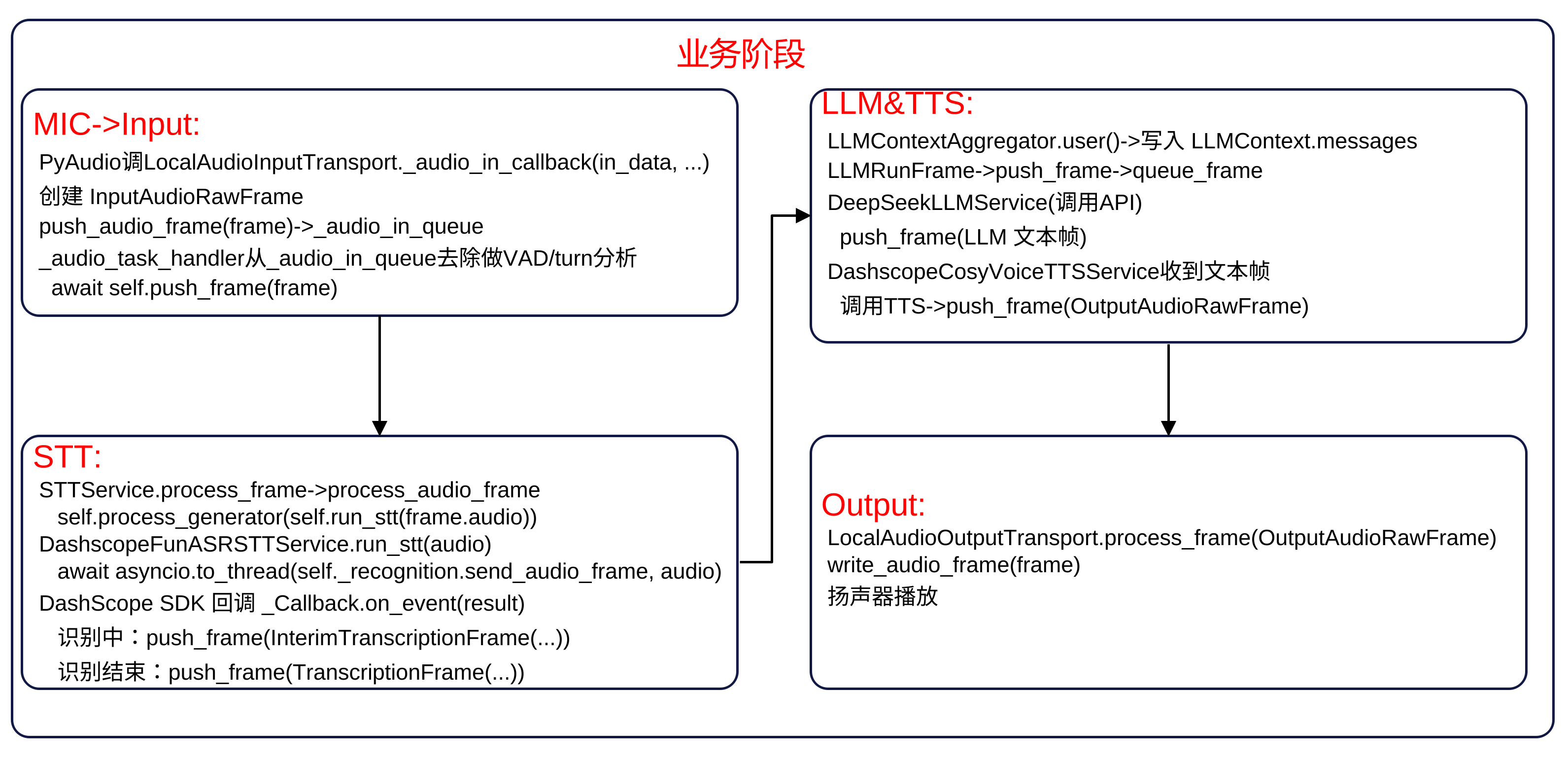
业务流 启动阶段 帧处理
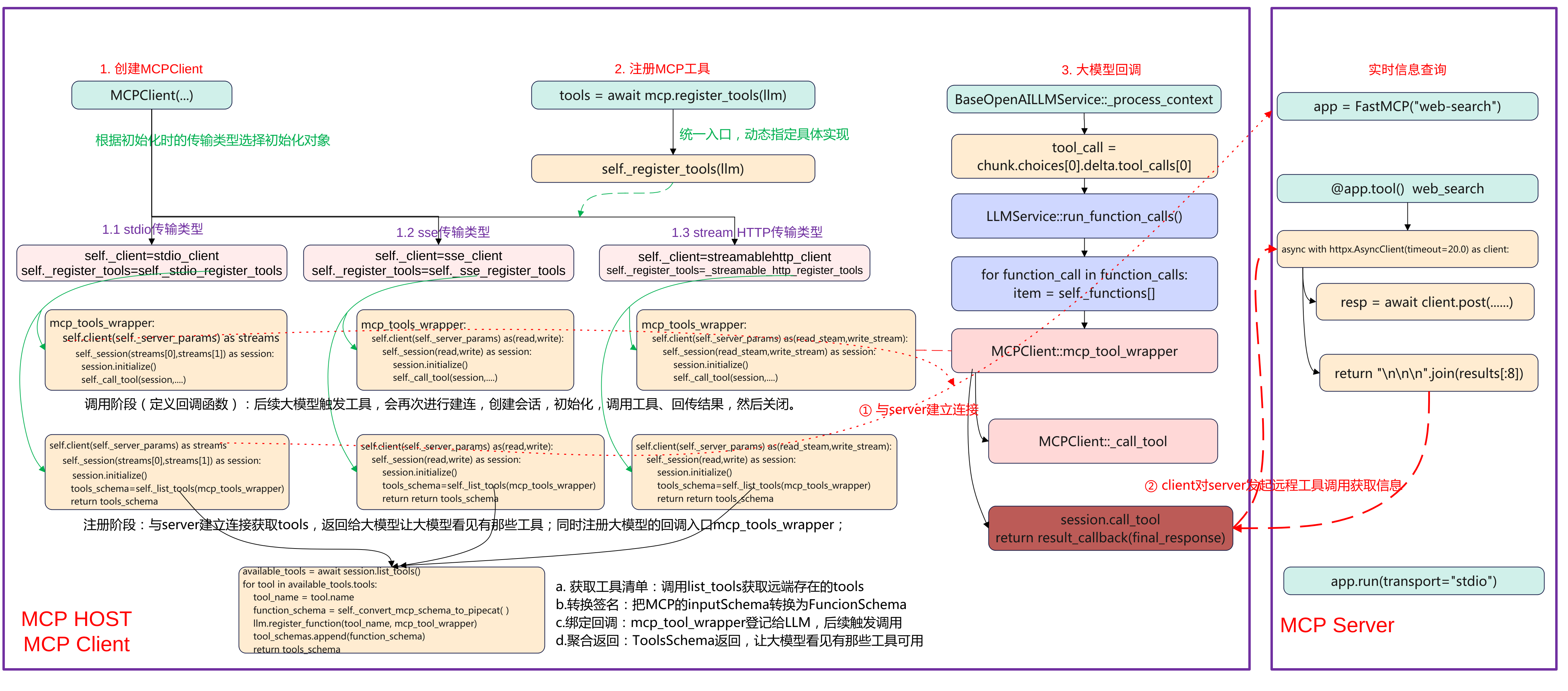
简介 本文主要基于Pipecat实现一个MCP stdio传输方式调用的示例。基于智谱Web-Search-Pro实现一个MCP Server,然后在Pipecat应用基础上实现MCP C
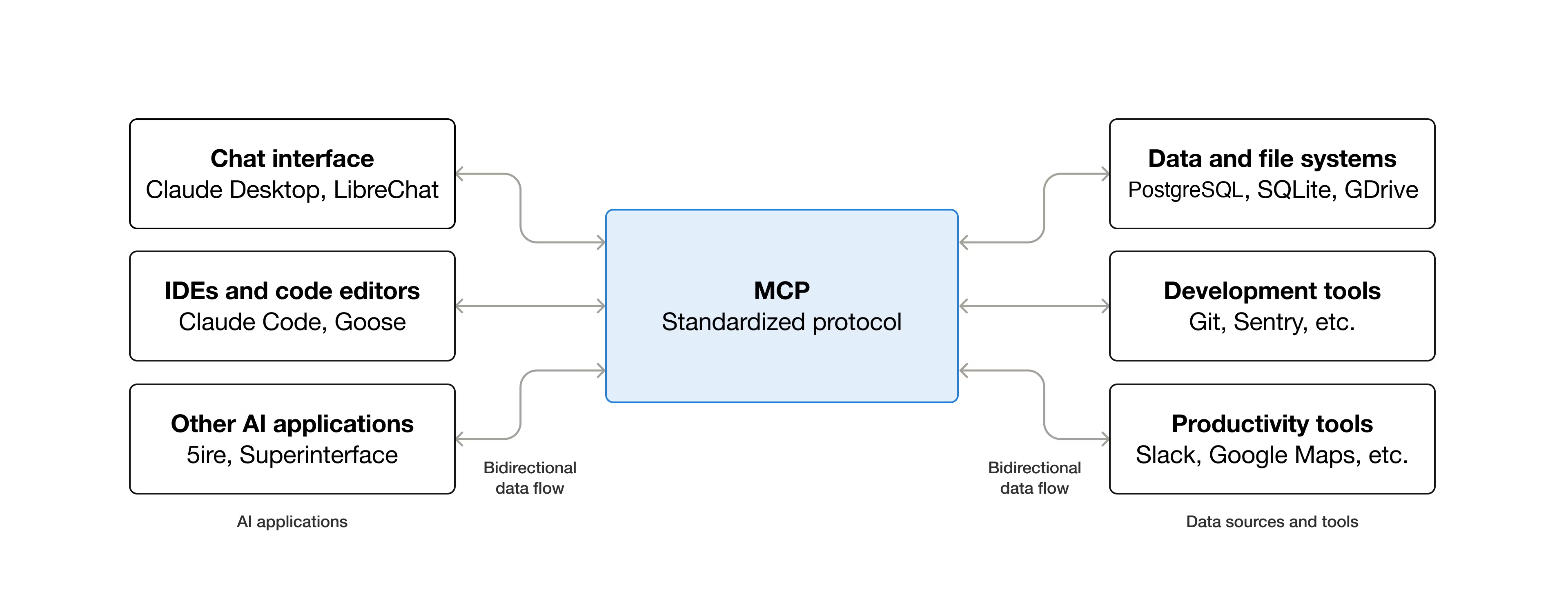
简介 什么是MCP MCP是Model Context Protocol模型上下文的一个开源标准,用于连接人工智能应用程序到外部系统。使用MCP,让Claude、ChatGPT这样的AI applica
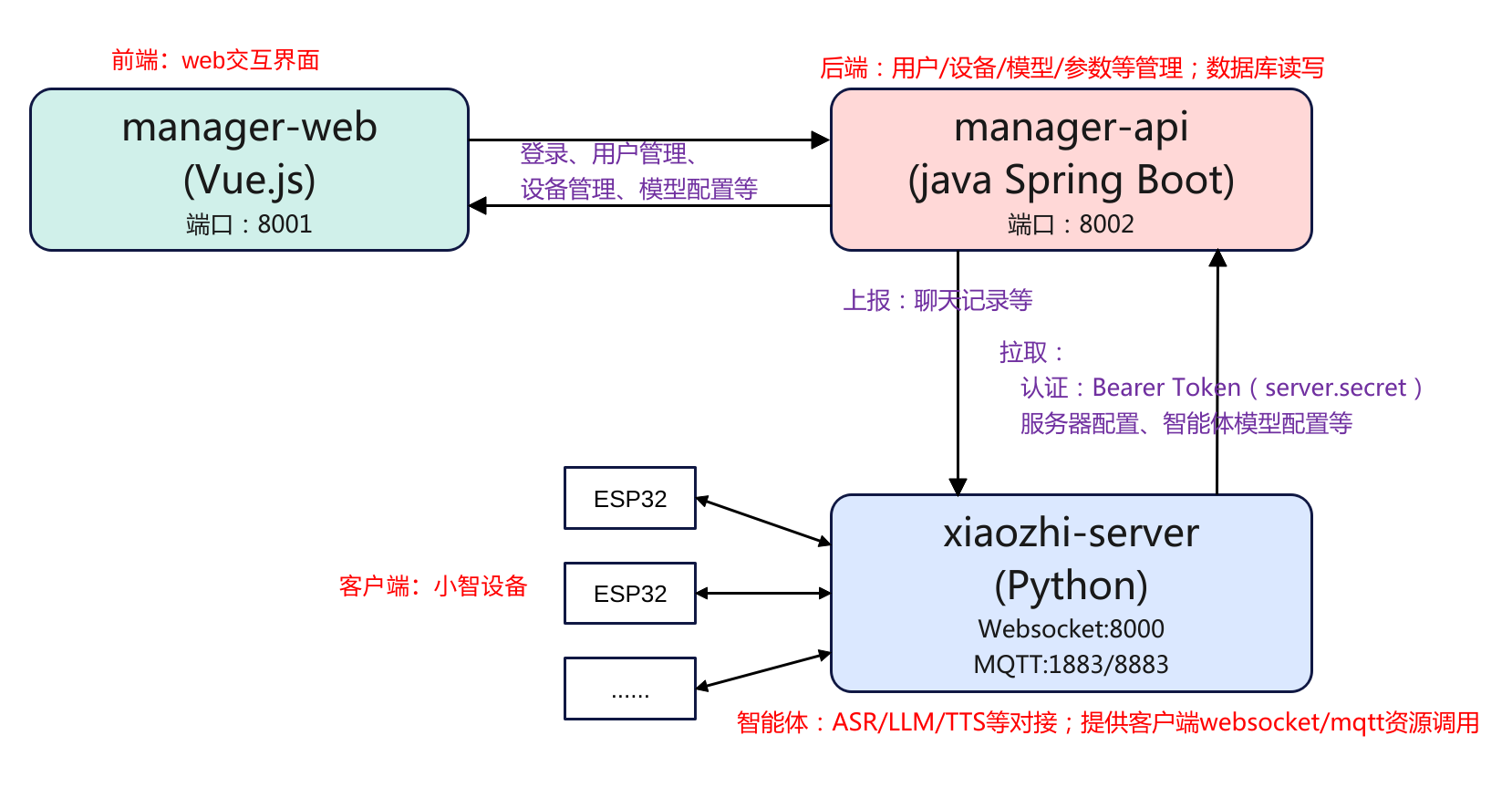
简介 本文主要是记录在ubuntu系统从零源码的方式本地部署小智Ai服务端的过程,项目的地址为:xiaozhi-server。在部署之前简单了解一下其项目框架,这里总结可以分为3部分

环境准备 简要记录在Orin nano平台搭建lekiwi环境,可以远程遥控底盘移动和机械臂示教的过程,需要的硬件如下: - NVIDIA Jetson Orin Nano开发板 - Lekiwi套件(底盘、主从机械臂) - P

安装浏览器 sudo apt update sudo apt install chromium-browser -y 安装后发现点击浏览器会没反应。按照下面方法配置。 snap download snapd --revision=24724 sudo snap ack snapd_24724.assert sudo snap install …
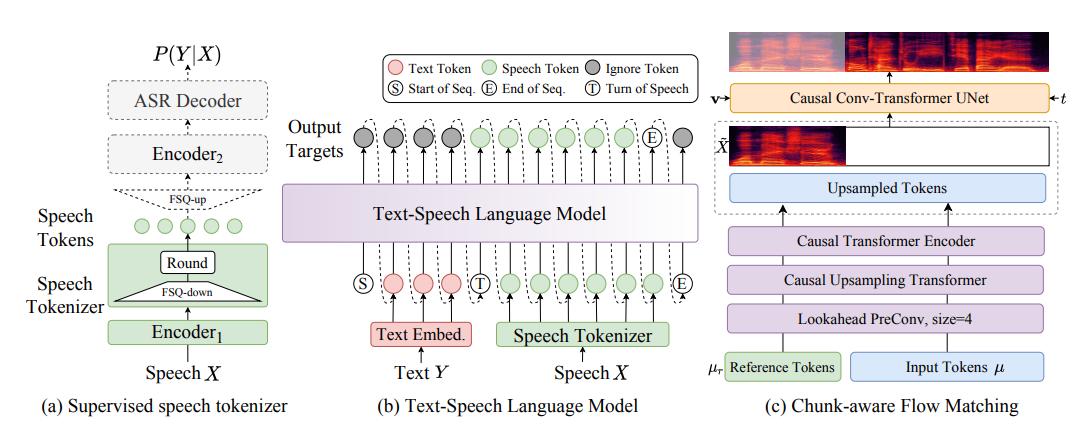
是什么 CosyVoice是阿里开源的一款文字转语音的开源模型,可以支持音色复刻。 怎么用 环境安装 (1)代码下载 git clone --recursive https://github.com/FunAudioLLM/CosyVoice.git cd CosyVoice git submodule update --init --recursive 因 …
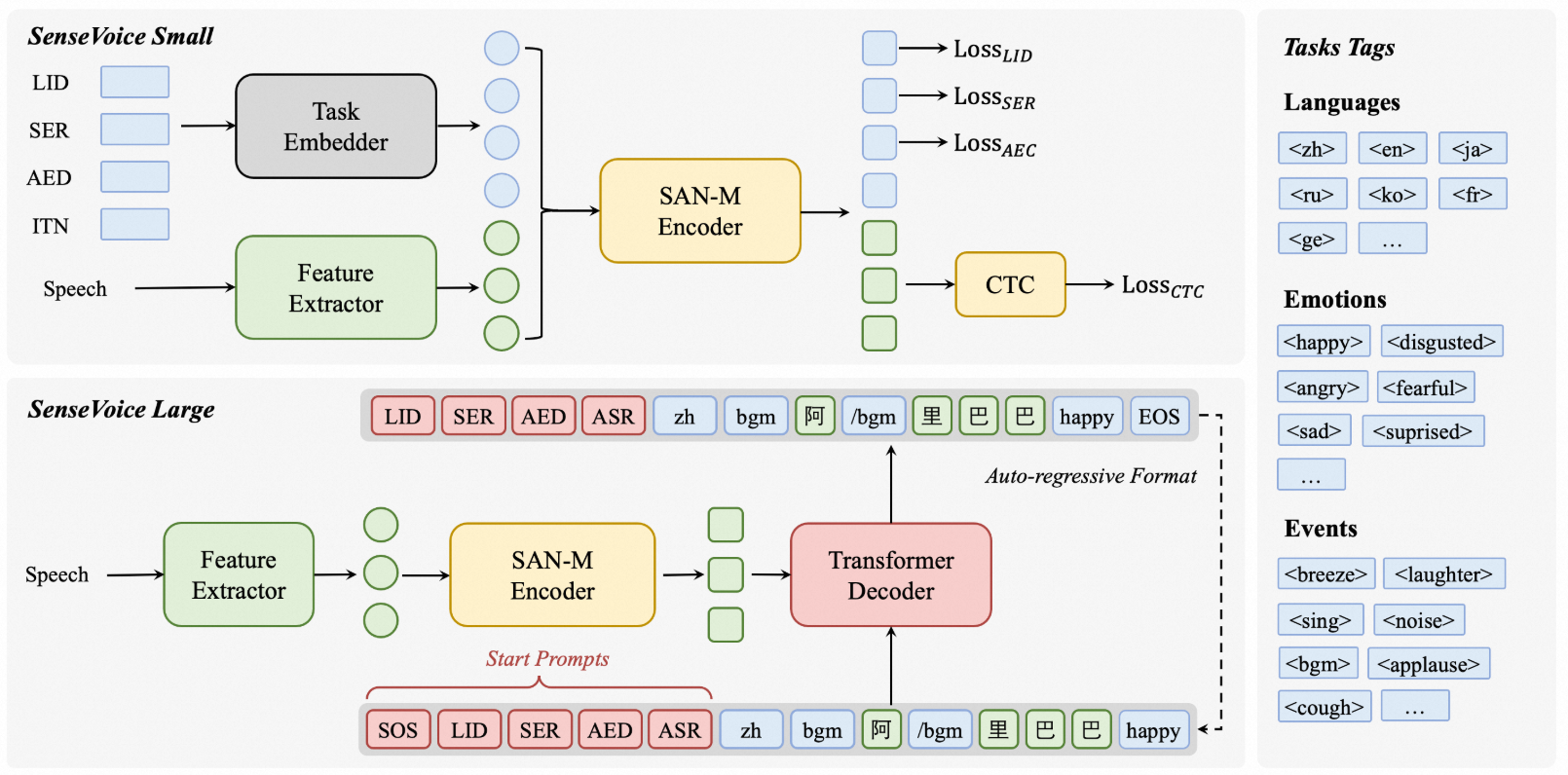
是什么 SenseVoice是多语言识别的模型,支持语音转文字(ASR, Automatic Speech Recognition,自动语音识别),语种识别(LID, Language Identification),语音情感识别(
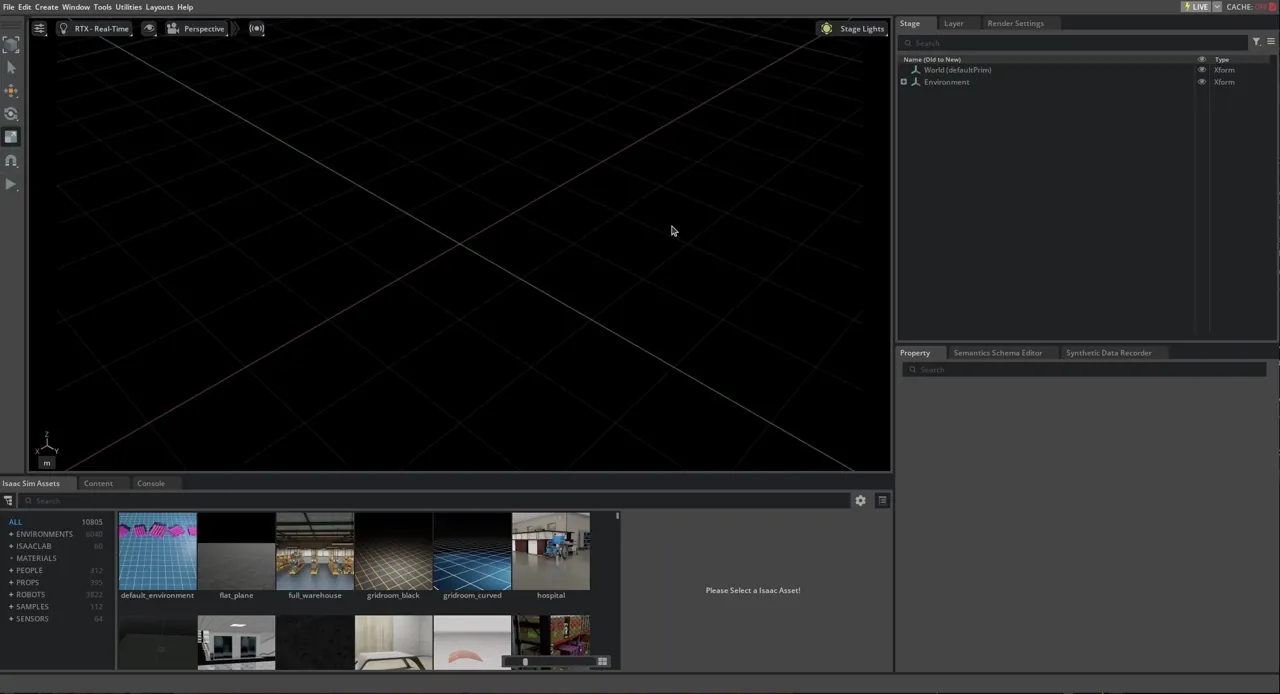
简介 如果是NVIDIA Isaac Sim的新用户,可以按照本文的两个示例来体验Isaac Sim。本文主要提供Isaac Sim基础使用教程、机器人基础教程。 在快速入门教程中,所有可通过 GUI 执行的
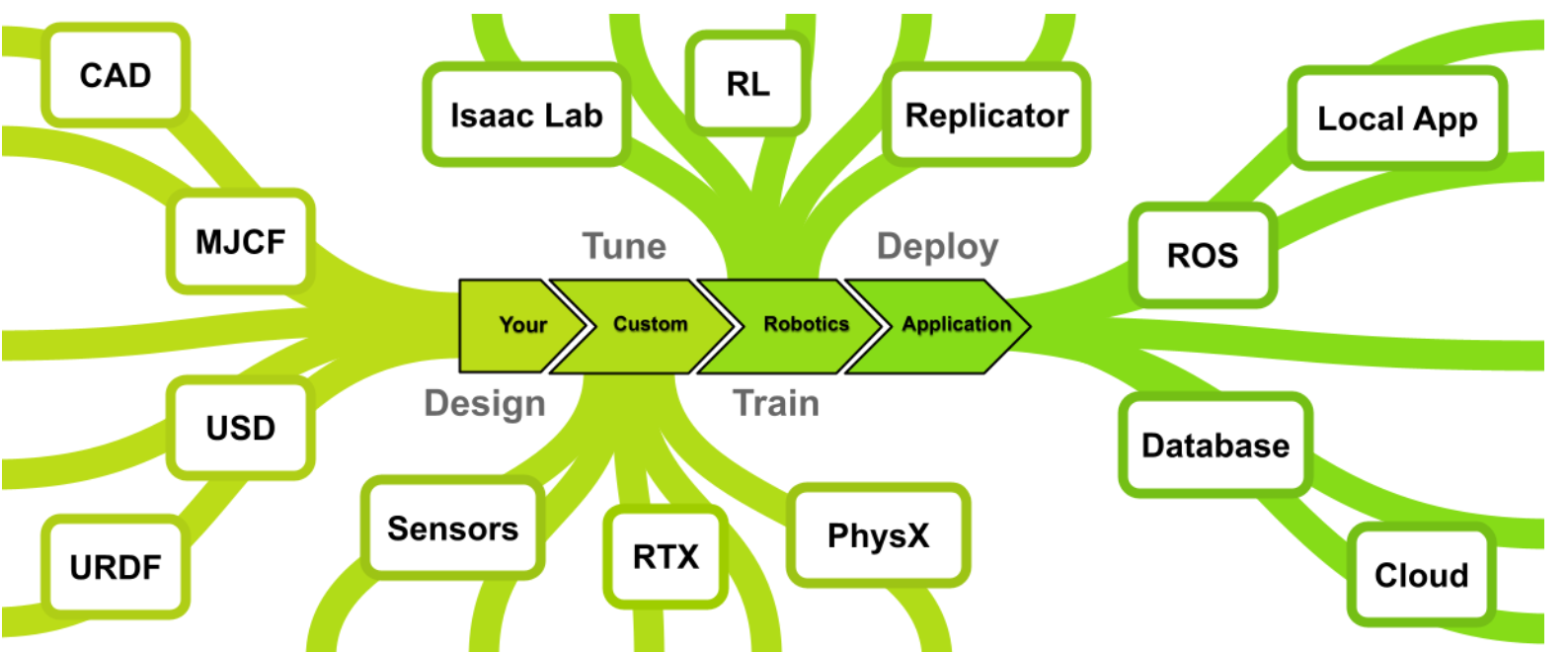
什么是isaac sim NVIDIA Issac Sim是一款基于NVIDIA omniverse构建的参考应用应用程序,使开发人员能够在基于物理的虚拟环境开发、模拟和测试AI机器人。 设计 Isaac Sim提供了一系列工
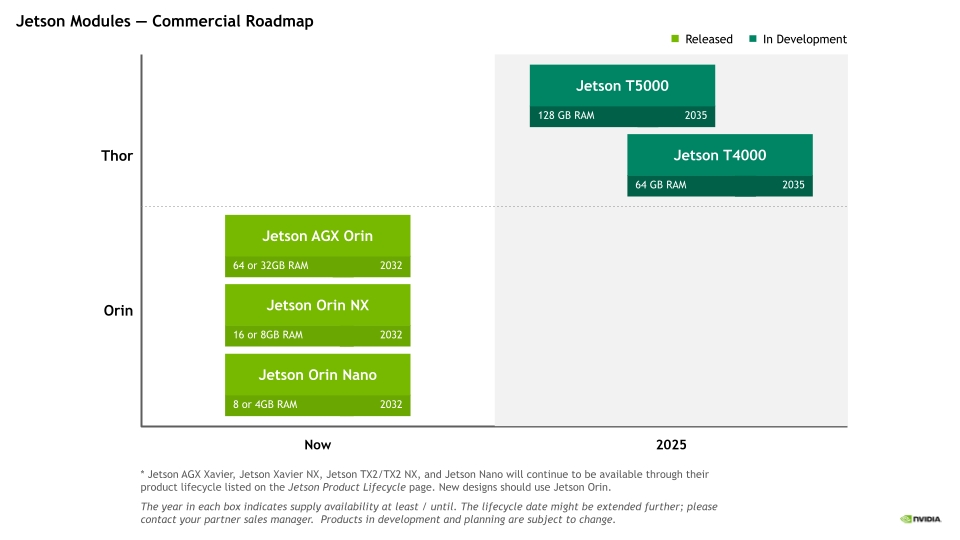
简介 NVIDIA Jetson平台提供用于开发和部署AI赋能机器人、无人机、IVA(Intelligent Video Analytics,智能视频)应用和自主机器的工具。在边缘生成式AI、NVIDIA M
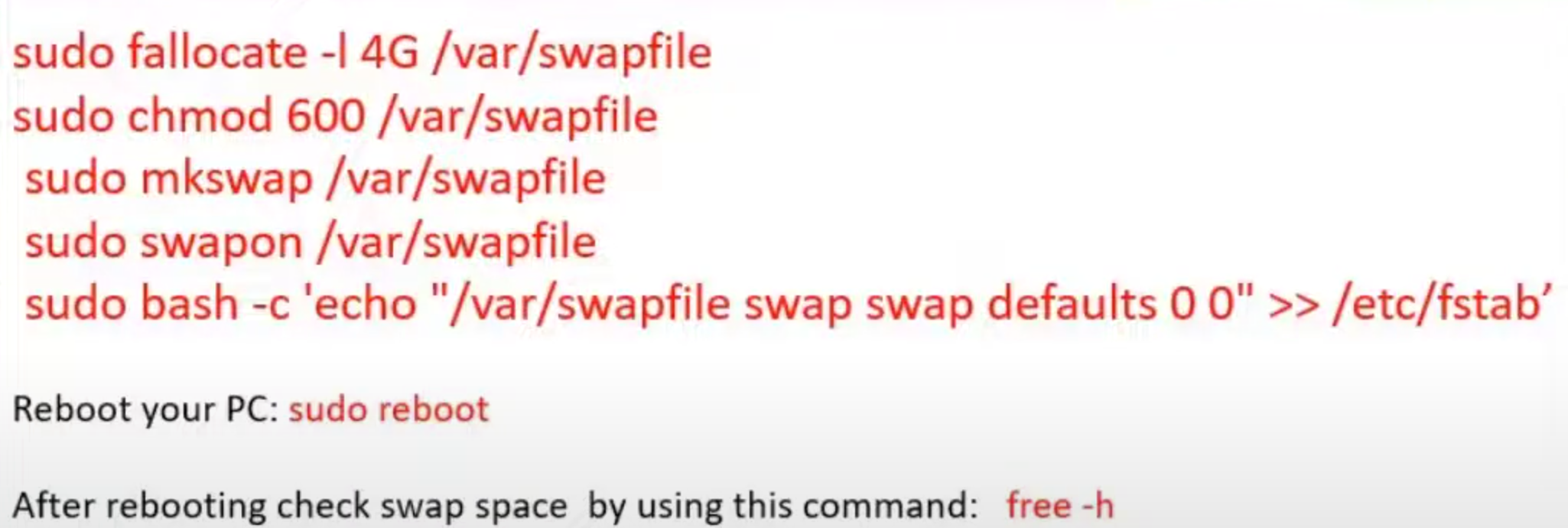
环境准备 烧录镜像 下载NVIDIA jetson nano镜像,其镜像是基于ubuntu18.04修改。使用开源的balenaEtcher烧录器写到SD卡上,然后插卡启动 网络准备 买一个无线网卡然后
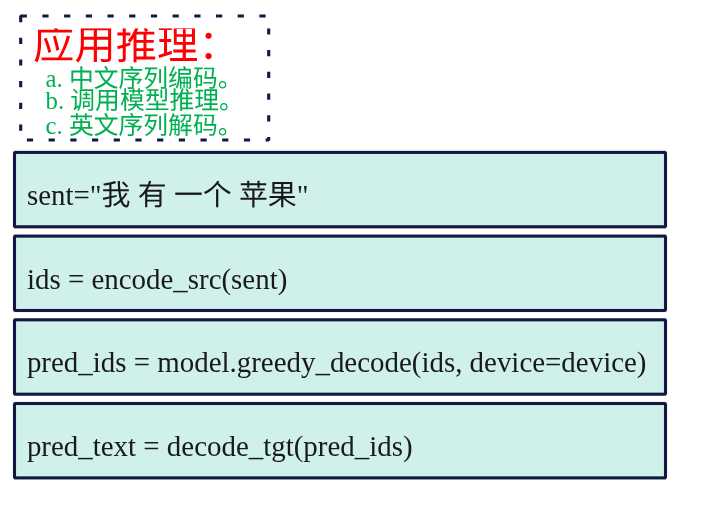
概述 在http://www.laumy.tech/2458.html#h37章节中,介绍了transformer的原理,本章用pytorch来实现一个将"我有一个苹果&q
简介 Dataset和DataLoader在pytorch中主要用于数据的组织。这两个类通常一起搭配处理深度学习中的数据流。 Dataset 用于产出“单个样本”:定义怎么按索引取到一个样本,以及总
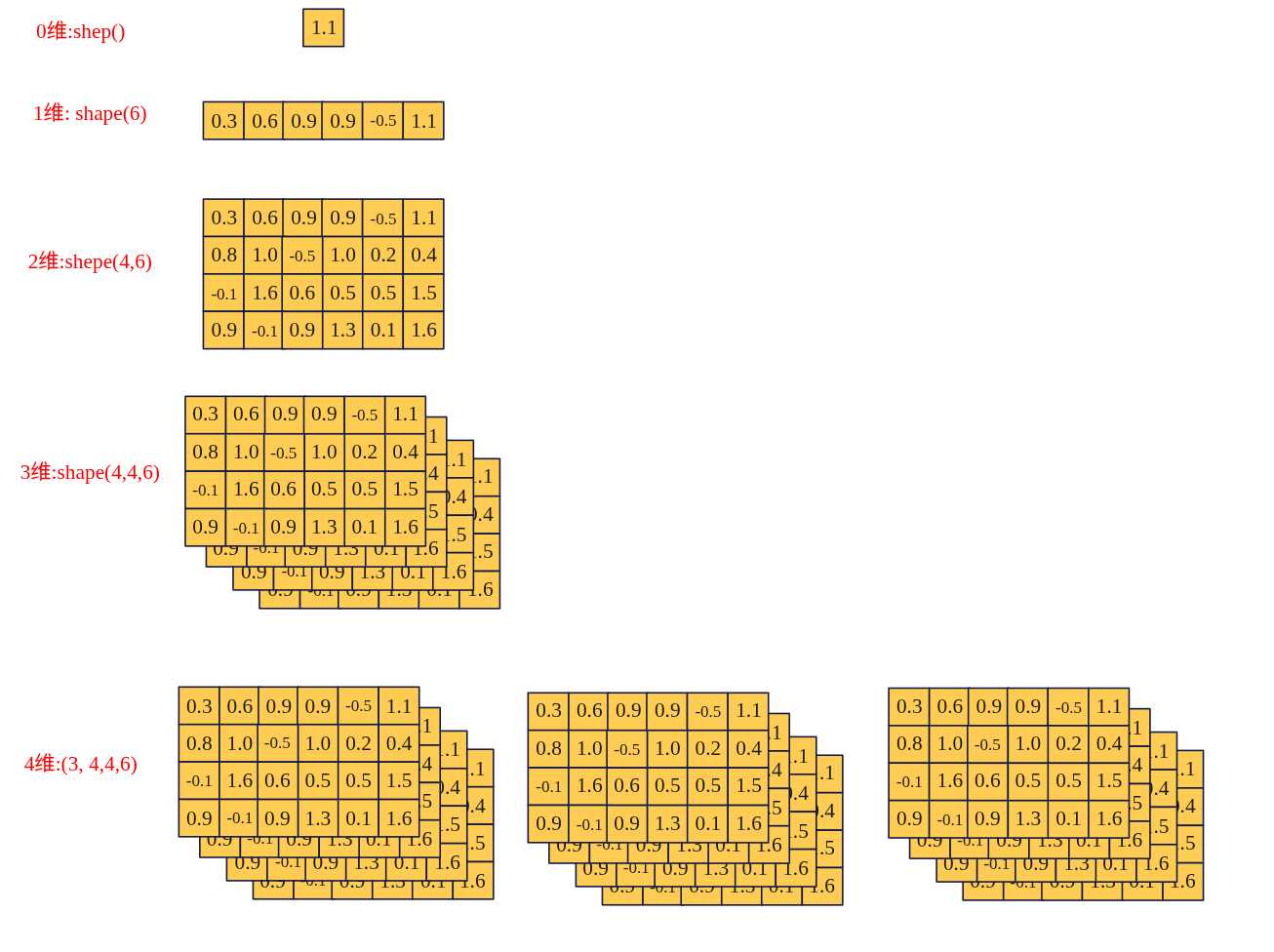
维度是什么 维度=数据需要“几个”索引才能定位到一个元素,也叫做轴数(axis)或阶(rank)。 可以看成"套盒子"的层数,盒子里面装盒子,再装数字。每多一层外括
加载准备 初始化ONNXRuntime环境 Ort::Env env(ORT_LOGGING_LEVEL_WARNING, "YOLOv5Inference"); Ort::Env 是 ONNX Runtime C++ API 中用于初始化运行环境的类,有多个重载的构造函数,下面是一个构造函数原型及参数作用如下。 Ort::Env( …
是什么 pip install 是python包管理器,用于python软件包的下载、安装、卸载等功能。 怎么用 在线安装 pip install 软件包名 pip install 软件包名==版本号 例如pip install requests,或pip install reque
ONNX Runtime介绍 ONNX Runtime不依赖于Pytorch、tensorflow等机器学习训练模型框架。他提供了一种简单的方法,可以在CPU、GPU、NPU上运行模型。通常ONNX
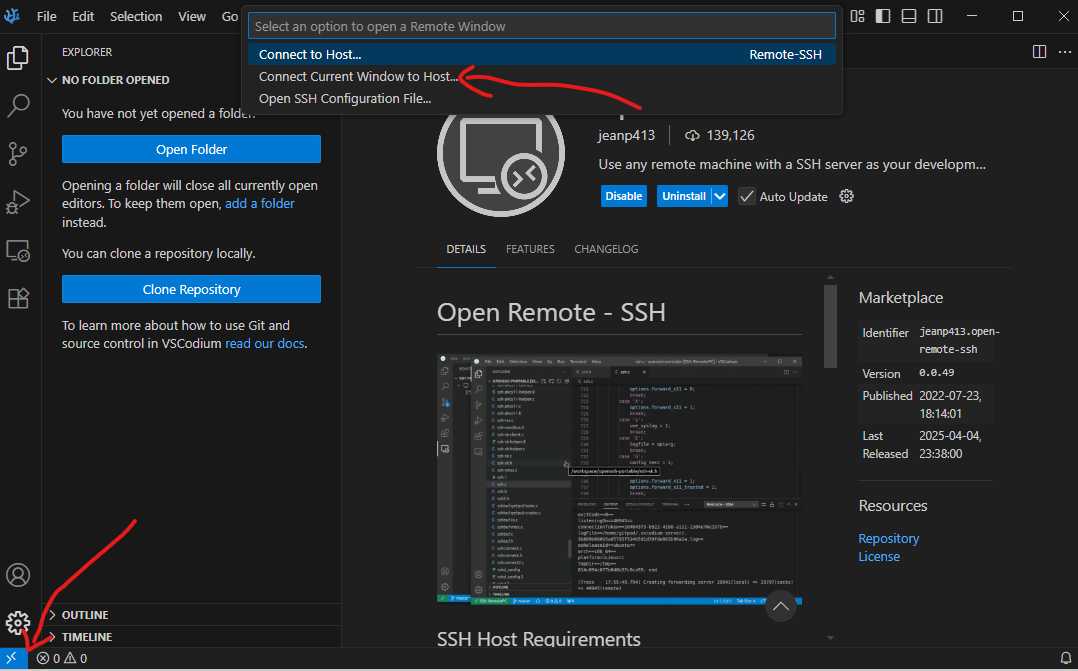
PC上安装vscodium 下载安装vscodium,https://vscodium.com/ 安装Open Remote - SSH插件。 可能要等等比较久,跟网络有关系,如果还是安装不了,可以参考
安装llama.cpp 从GitHub上下载官方的源码。 git clone https://github.com/ggml-org/llama.cpp.git cd llama.cpp 使用camke进行编译,先创建build环境 cmake -B build 发现有报错curl没有安装。 -- The C compiler identification …
模型流程 1. NPU初始化 NpuUint npu_uint; int ret = npu_uint.npu_init(); 2.根据传入的模型文件,创建网络 NetworkItem yolov5; status = yolov5.network_create(model_file, network_id); vip_create_network() …
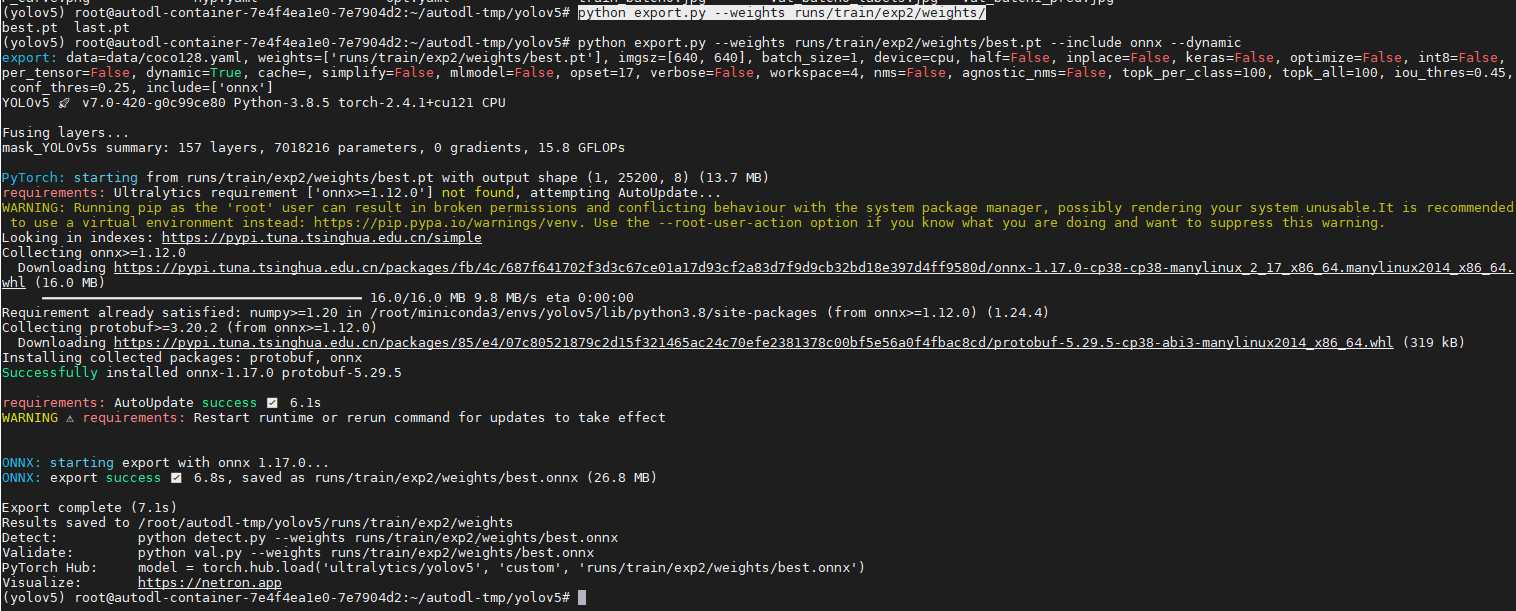
导出 ONNX模型 python export.py --weights runs/train/exp2/weights/ NPU不支持动态输入,使用onnxim工具进行转换为固定输入,先安装onnxsim工具。 pip install onnxsim -i https://pypi.doubanio.com/simple/ 接着进行转换 python -m …

介绍 本文使用AutoDL云服务搭建YOLOv5的运行环境。 获取云服务器 在这个链接上https://www.autodl.com/home订阅服务,这里选择的是按量计费。 镜像选择基础
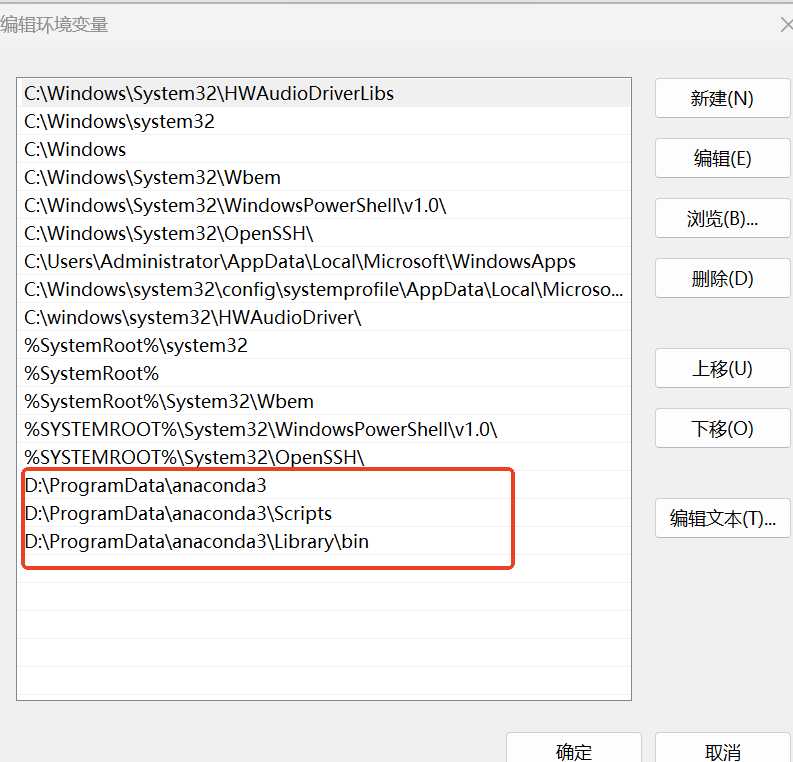
annaconda可以理解为ai环境可以创建很多个房间,比如允许多个不同版本的python。每个房间可以保存不同的环境变量。 步骤1:下载安装包,安装anaconda,https:/
app start 主要是初始化板级、显示、WiFi连接、音频codec、编解码、协议、音效、唤醒几个环节。 auto& board = Board::GetInstance(); //获取板级实例 SetDeviceState(kDeviceStateStart
环境是centos,下面是部署步骤。 命令1: 安装ollama 安装命令:curl -fsSL https://ollama.com/install.sh | sh 安装日志: >>> Cleaning up old version at /usr/local/lib/ollama >>> Installing ollama to /usr/local …
前置条件 需要先创建获得API key和创建推理接入点。 API key获取 https://www.volcengine.com/docs/82379/1361424#f79da451 创建推理接入点 https://www.volcengine.com/docs/82379/1099522 安装python环境 python版本需要安装到Python …