
lekiwi录制训练推理流程实践
录制 设备端 先确定一下相机编号 cd ~/lerobot/ lerobot-find-cameras 生成路径:outputs/captured_images 然后修改uart的权限 sudo chmod 666 /dev/ttyACM0 启动等待连接 python -m lerobot.robots.lekiwi.lekiwi_host \ …
录制 设备端 先确定一下相机编号 cd ~/lerobot/ lerobot-find-cameras 生成路径:outputs/captured_images 然后修改uart的权限 sudo chmod 666 /dev/ttyACM0 启动等待连接 python -m lerobot.robots.lekiwi.lekiwi_host \ …
系统架构 硬件组成 Lekiwi是一个底盘+机械臂的结构。 机械臂: 6个自由度(shoulder_pan, shoulder_lift, elbow_flex, wrist_flex, wrist_roll, gripper) 移动底盘:3个全向轮,三轮全向移动(left_wheel
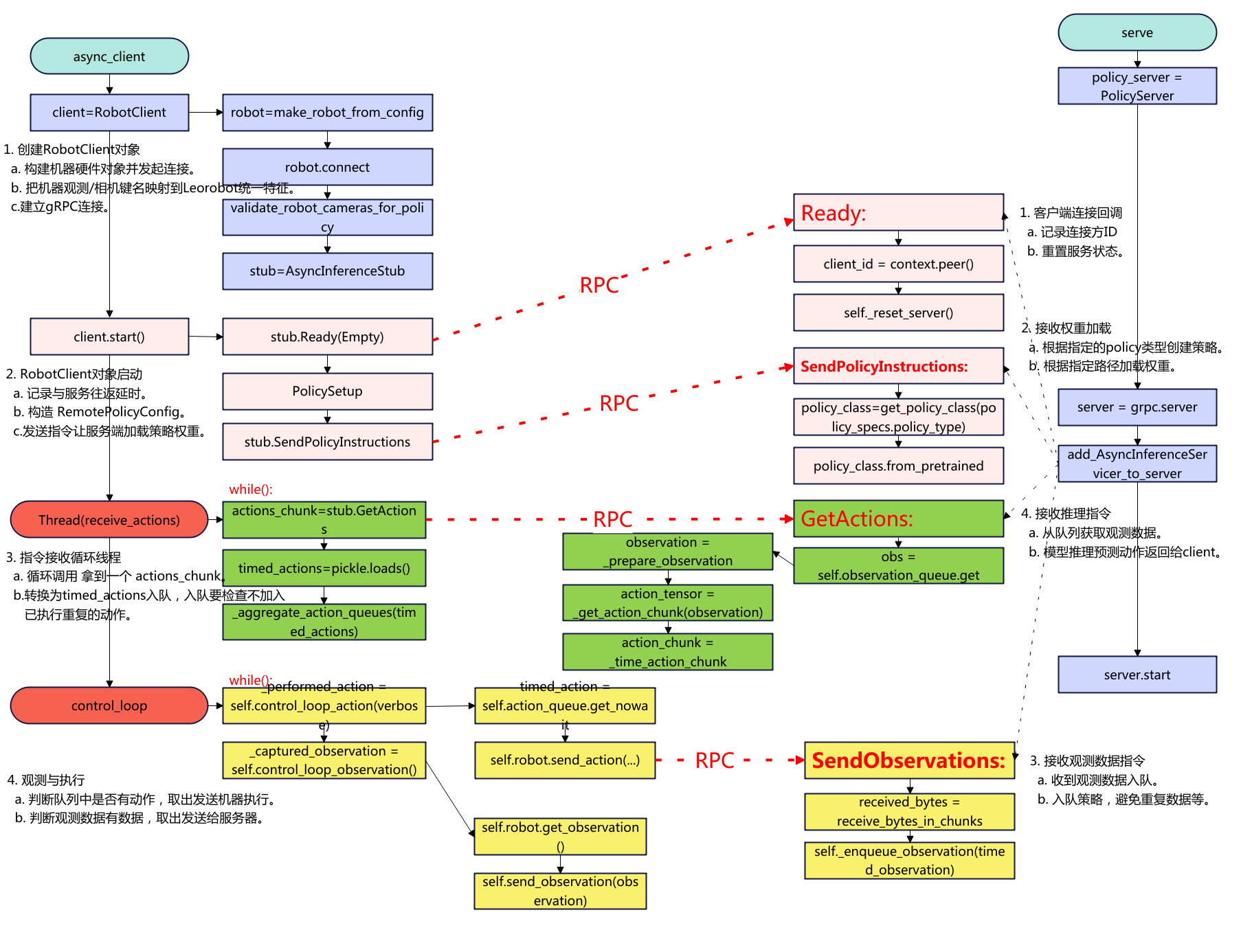
概述 本文记录lerobot smolvla异步推理实践,将SmolVLA的策略server部署到AutoDL上,真机client在本地笔记本上运行。 下面是代码的流程图: 环境准备 先登录
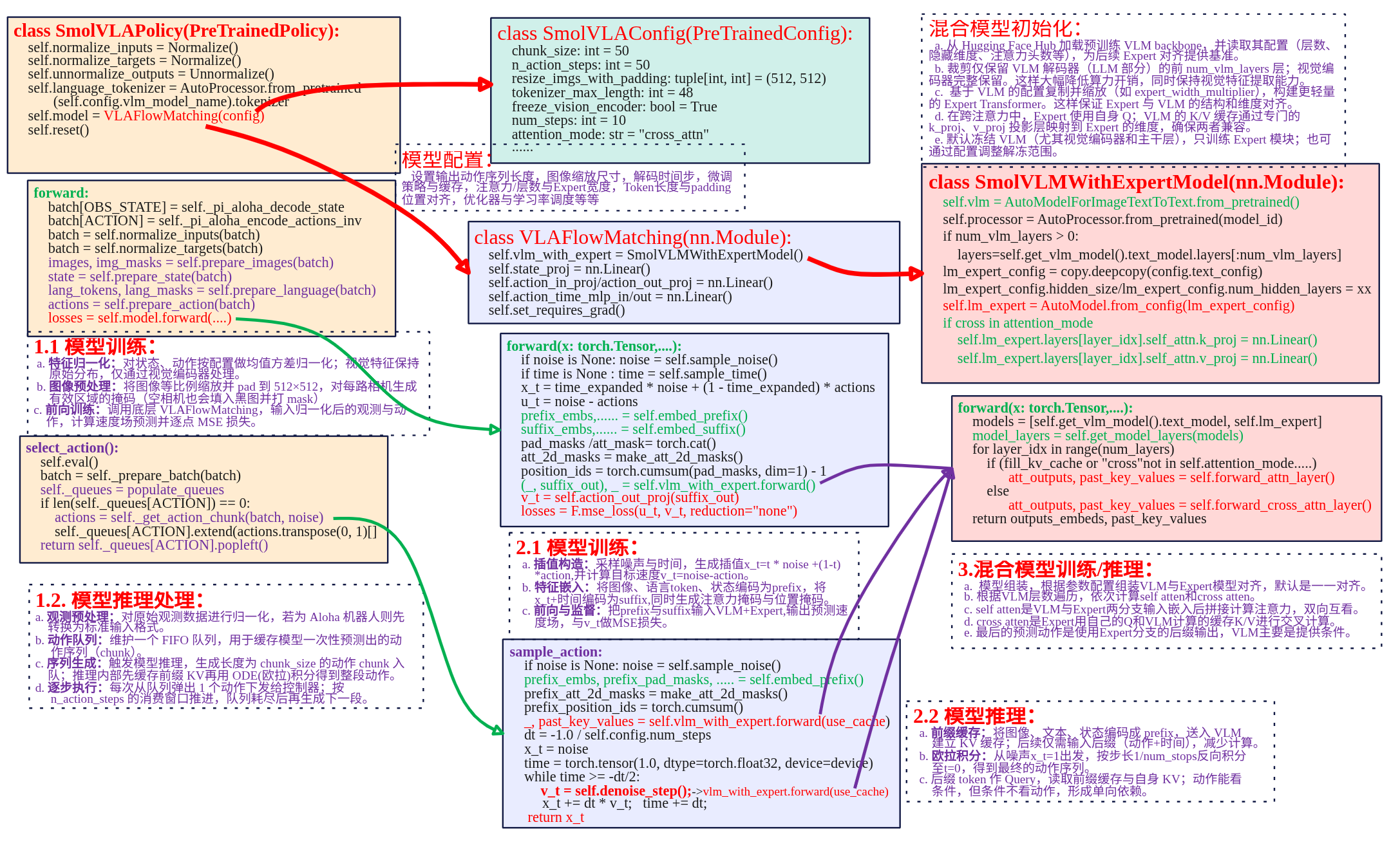
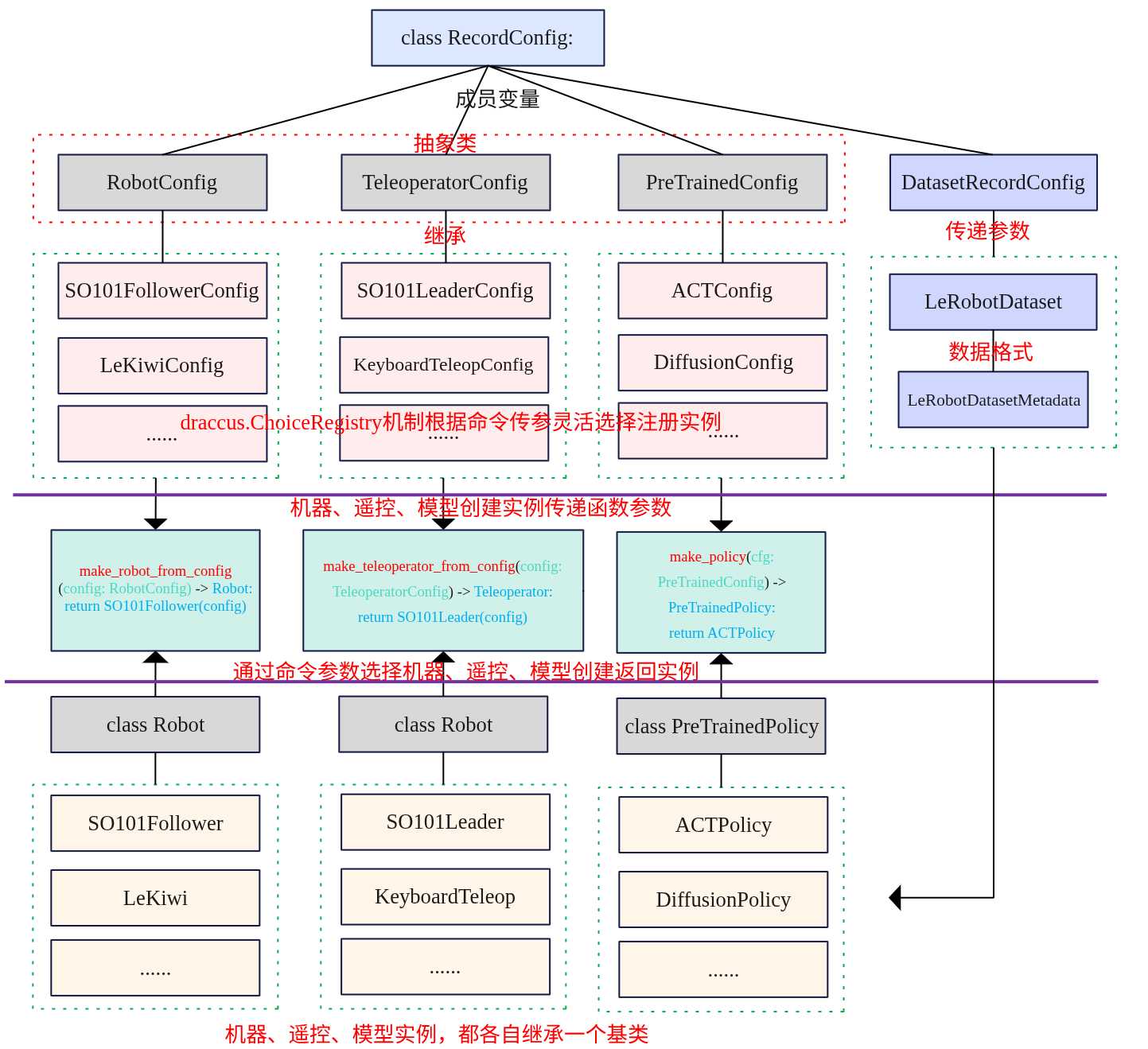
框架 本文主要对lerobot SmolVLA策略代码进行分析,下面是策略实现关键部分框图。 SmolVLAPolicay类封装向上提供策略的调用。SmolVLAConfig是对Smol
环境安装 pip install -e ".[smolvla]" 在原来lerobot的环境基础上。 启动训练 本文主要是记录复现lerobot smolvla策略的效果,为了快速看到效果,这里不进行采集数据了,直接用此前ACT采集的数
配置类ACTConfig @PreTrainedConfig.register_subclass("act") @dataclass class ACTConfig(PreTrainedConfig): # 输入/输出结构 chunk_size: int = 100 # 动作块长度(每次预测的动作序列长度) n_action_steps: int = 100 …
学习率调度器简介 是什么 学习率调度器(Learning Rate Scheduler)是深度学习训练中动态调整优化器学习率的工具(注意是在优化器的基础上动态调整学习率),通过优化收敛过程提升模
torch.optim简介 在学校lerobot的策略优化器前,我们先再复习一下什么是优化器。 什么优化器 优化器官方解释就是在深度学习中让损失函数通过梯度下降思想逐步调整参数以达到最小
初始化 @parser.wrap() def train(cfg: TrainPipelineConfig): cfg.validate() # 验证配置合法性(如路径、超参数范围) init_logging() # 初始化日志系统(本地文件+控制台输出) if cfg.seed is not None: set_seed(cfg.seed) # 固定随机种 …
简介 lerobot record是关键核心流程,其包括了数据的采集和模型推理两部分。 如果是数据采集模式,命令启动如下 python -m lerobot.record \ --robot.disable_torque_on_disconnect=true \ --robot.type=so101_follower \ …
启动 示教的功能主要是主臂控制,从臂跟随,在数据采集是非常的一环。下面是模块启动的执行命令: python -m lerobot.teleoperate \ --robot.type=so101_follower \ --robot.port=/dev/ttyACM0 \ --robot.id=R12252801 \ …
why calibrate 先来看看标定后的数据 { "shoulder_pan": { #肩部旋转关节 "id": 1, "drive_mode": 0, "homing_offset": -1620, "range_min": 1142, "range_max": 2931 }, "shoulder_lift": { #肩部升降关节 "id": 2, …
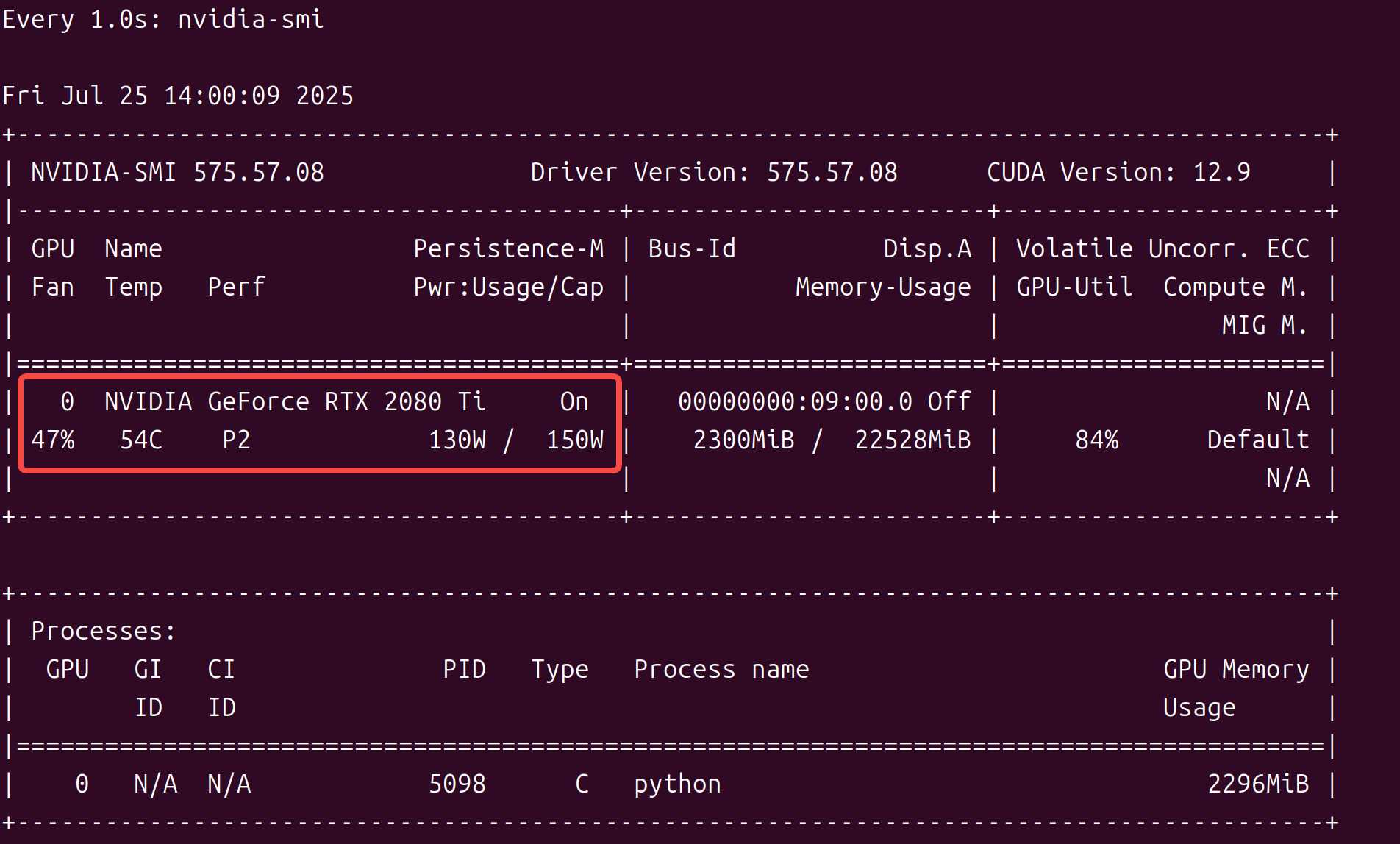
问题 当前使用的是魔改版的NVIDIA 2080 Ti 22G显卡,发现在模型训练过程中,跑着跑着就报错了,具体如下: raceback (most recent call last): File "/home/laumy/lerobot/./src/lerobot/scripts/train.py", line 291, in <module> …
设备查询 本文是记录ubuntu系统lerobot试验的快捷命令,方便开始负责执行设备,不会介绍为什么? python -m lerobot.find_port sudo chmod +666 /dev/ttyACM0 /dev/ttyACM1 python -m lerobot.find_cameras 机器标定 从臂标定 python -m …