
基于ubuntu系统安装使用Fast DDS
什么是Fast DDS Fast DDS是一个高性能的"分布式通信中间库",用来在不同进程、不同设备之间传输数据的。Fast DDS是用C++写的一个DDS实现,在同一台机器的多
什么是Fast DDS Fast DDS是一个高性能的"分布式通信中间库",用来在不同进程、不同设备之间传输数据的。Fast DDS是用C++写的一个DDS实现,在同一台机器的多
地图构建 在 ROS2 中,地图构建常用 SLAM(Simultaneous Localization and Mapping) 技术。其大概流程是: 传感器采集数据:可使用激光雷达(2D/3D LiDAR)或相机(VSLAM) 里程
相机 相机安装 sudo apt install ros-jazzy-usb-cam 可视化 run usb_cam usb_cam_node_exe --ros-args -p video_device:=/dev/video2 ros2 run rqt_image_vew rqt_image_view 上面的-p指定具体的摄像头,可以用v4l2-ctl …
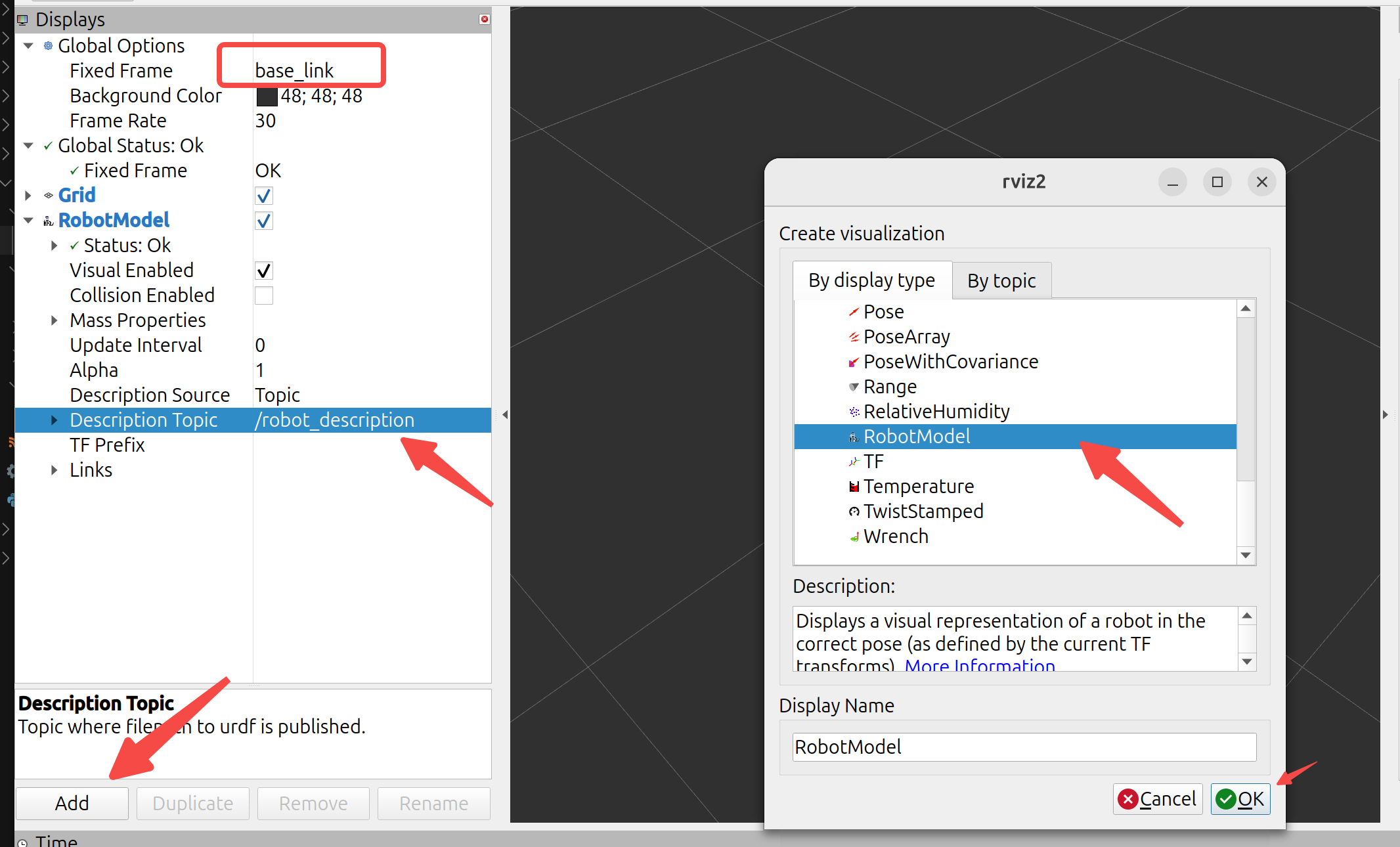
机器URDF模型 URDF 的全称是 Unified Robot Description Format(统一机器人描述格式)。它是 ROS / ROS2 系统里专门用来描述机器人结构和属性的一种 XML 格式文件。简单来说,URDF 就是“机器人说明书”,告诉 ROS
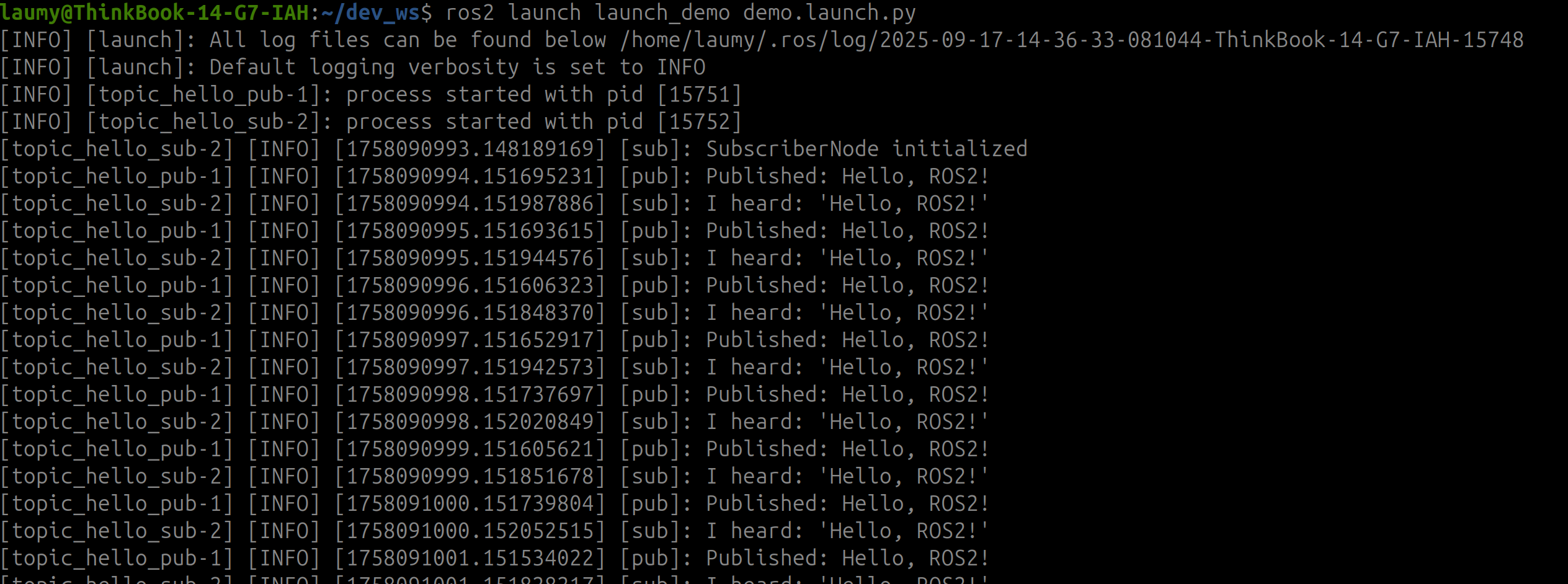
launch 在ROS2中,lauch是一个程序启动器,它的作用是一条命令可以启动多个节点,加载参数文件(YAML),重映射话题/服务/动作名称,条件启动(仿真/真机切换),嵌套调用其他lau
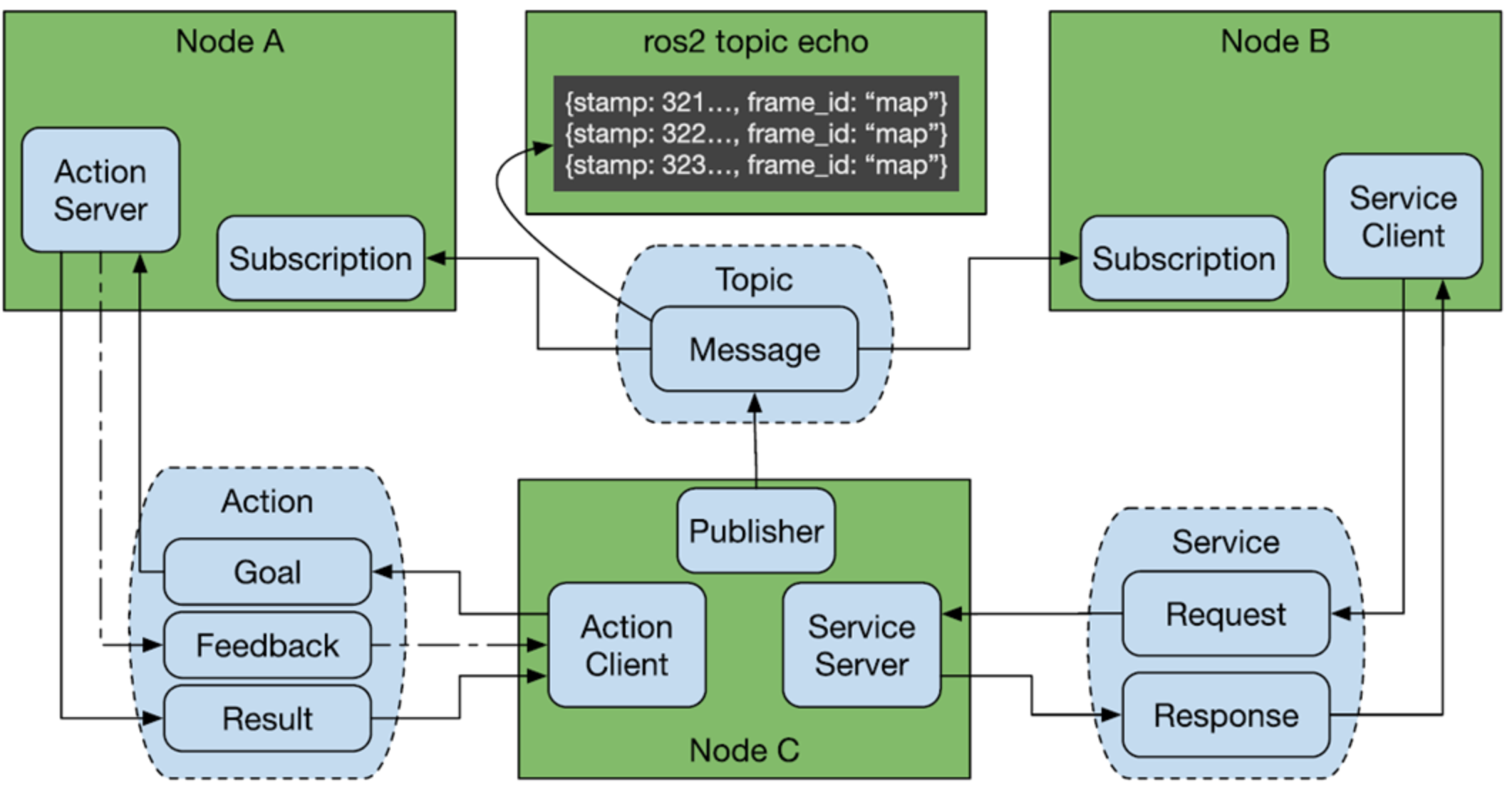
简介 在ROS系统每个节点可以理解为一个进程,更准确的说法它是一个包含了特定功能的独立执行单元。节点在ROS2中通常是一个可执行文件,负责执行特定的任务,如控制机器人、传感器数据处理

准备 在ROS2中什么是包,什么是节点? 包(Package) 是 ROS 2 的基本构建单元,包含了代码、资源、配置和依赖,组织着机器人的各个功能模块。这个packge可以理解为openwrt的
前言 本文在unbuntu 24.04.2系统上搭建ROS2系统。 No LSB modules are available. Distributor ID: Ubuntu Description: Ubuntu 24.04.2 LTS Release: 24.04 Codename: noble 设置编码格式 locale # check for …
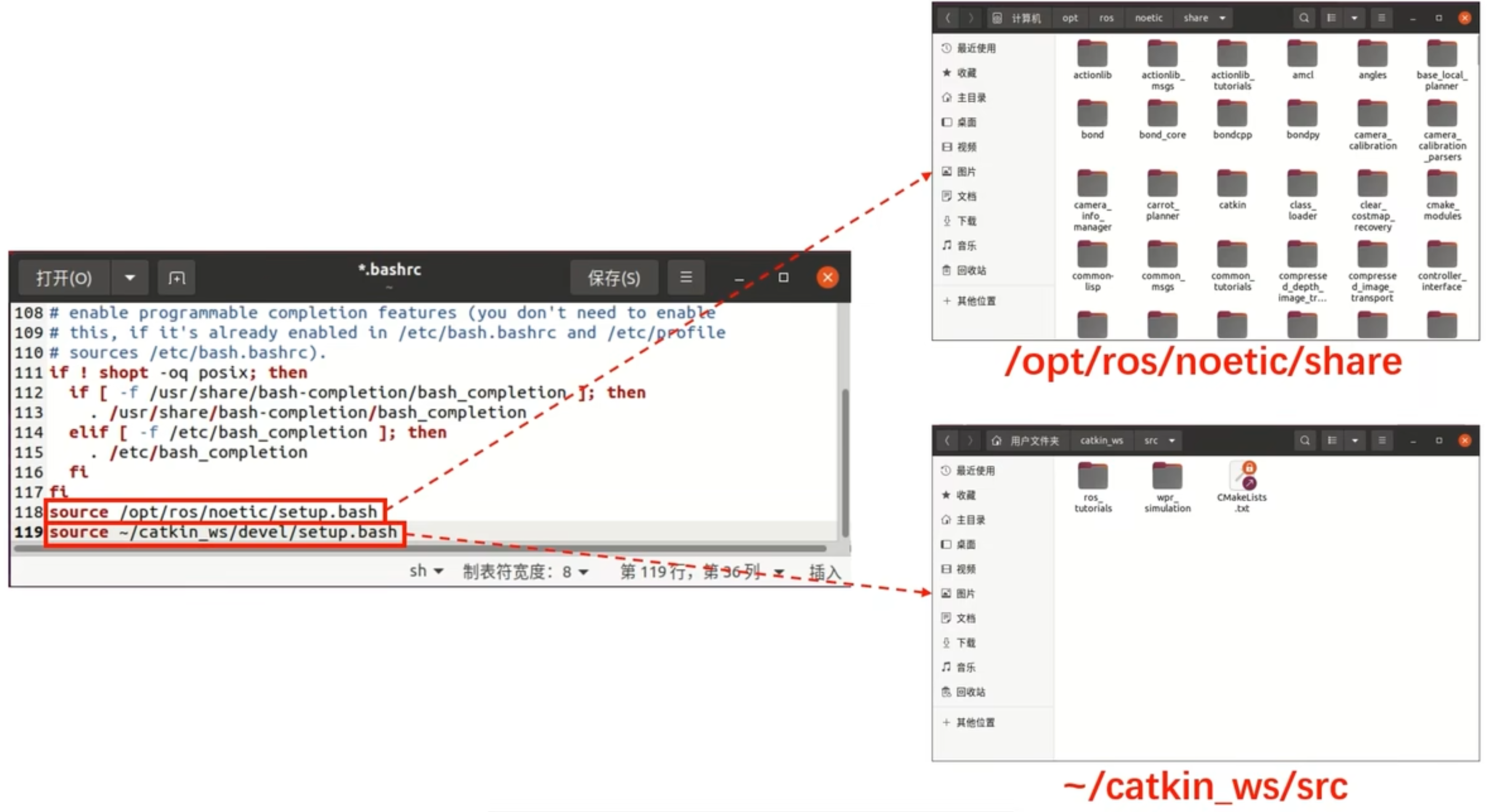
ROS的秘诀 梳理出有什么节点,每个节点的输入和输出是什么? 环境搭建 catkin vscode ROS插件、bracket pair colorizer 2 terminator sudo apt install terminator CRTL+ALT+T启动 CRTL+SHIFT+E左右分屏 CRTL+S
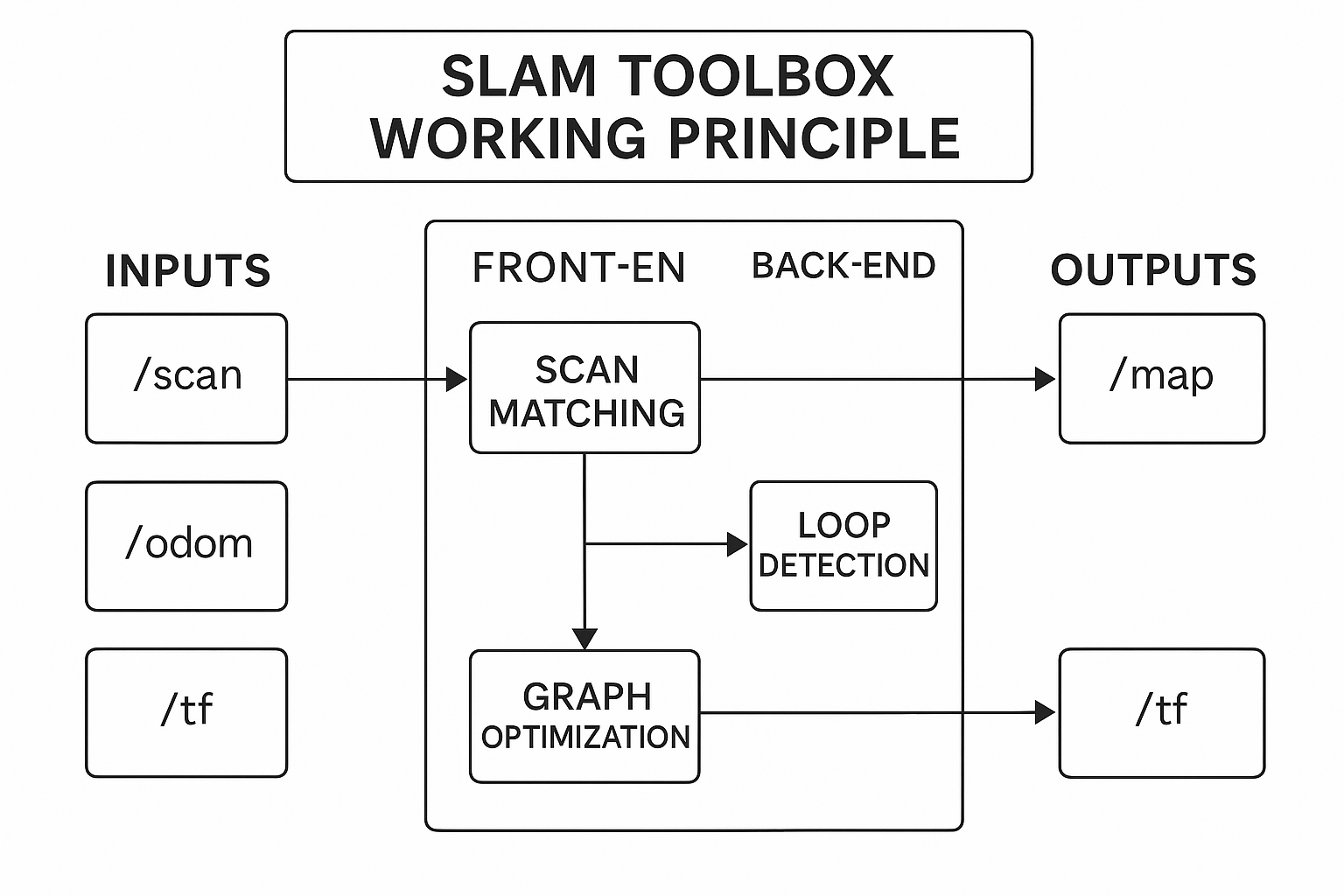
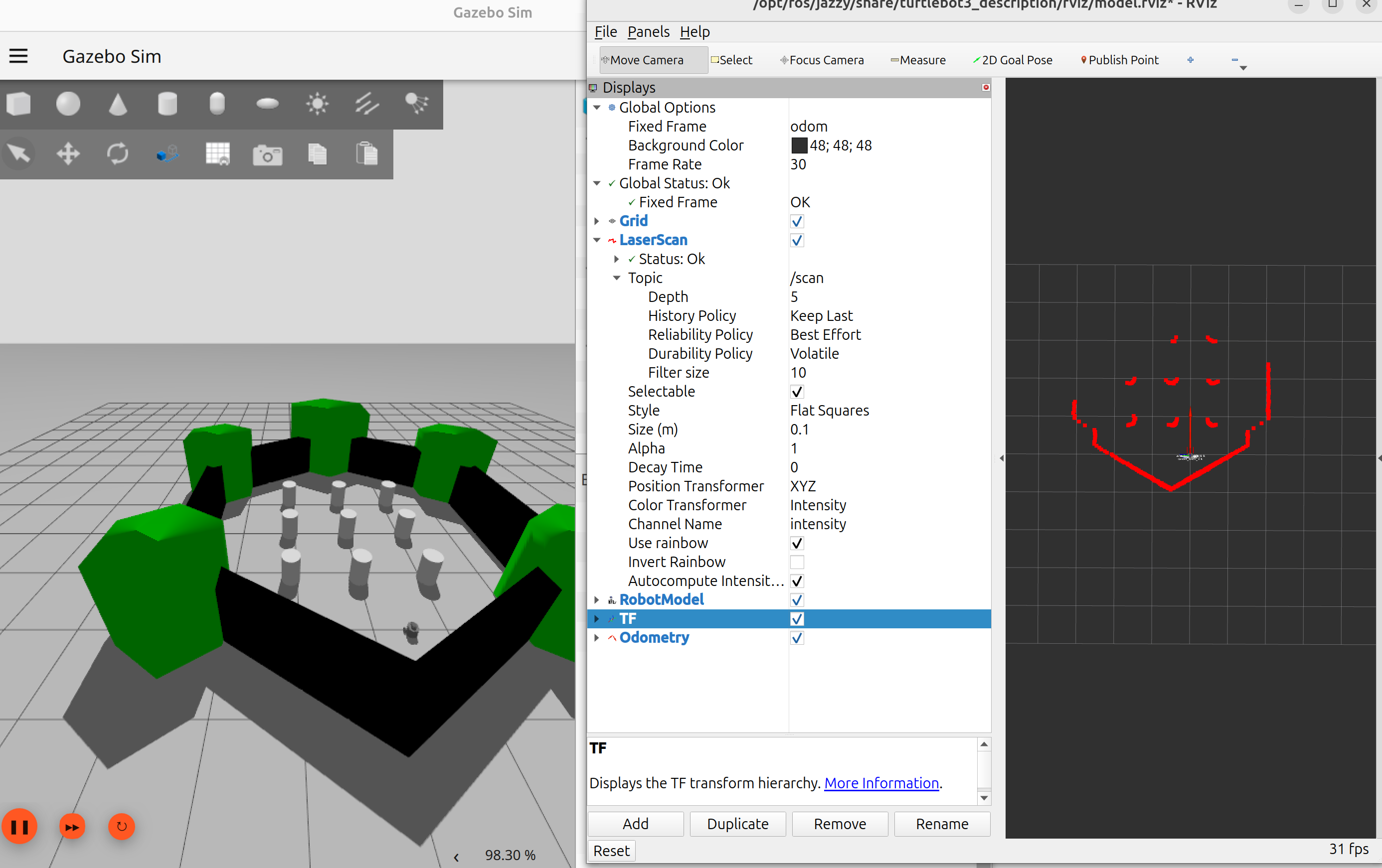
SLAM 2D 激光:slam_toolbox (1)安装启动 sudo apt update sudo apt install ros-jazzy-slam-toolbox ros2 launch slam_toolbox online_async_launch.py (2)输入输出 ros2 node info /slam_toolbox …