
lerobot示教
启动 示教的功能主要是主臂控制,从臂跟随,在数据采集是非常的一环。下面是模块启动的执行命令: python -m lerobot.teleoperate \ --robot.type=so101_follower \ --robot.port=/dev/ttyACM0 \ --robot.id=R12252801 \ …
启动 示教的功能主要是主臂控制,从臂跟随,在数据采集是非常的一环。下面是模块启动的执行命令: python -m lerobot.teleoperate \ --robot.type=so101_follower \ --robot.port=/dev/ttyACM0 \ --robot.id=R12252801 \ …
why calibrate 先来看看标定后的数据 { "shoulder_pan": { #肩部旋转关节 "id": 1, "drive_mode": 0, "homing_offset": -1620, "range_min": 1142, "range_max": 2931 }, "shoulder_lift": { #肩部升降关节 "id": 2, …
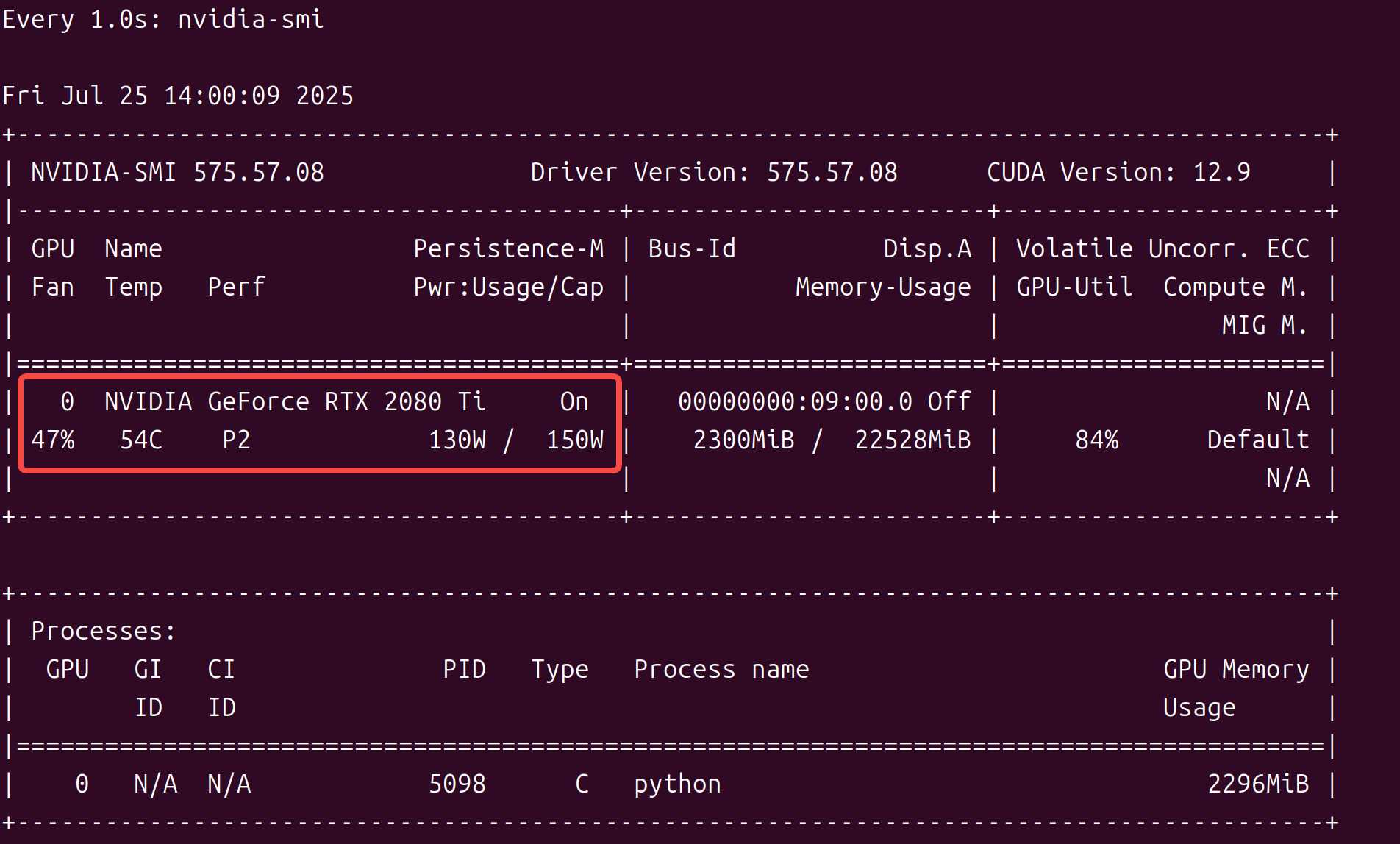
问题 当前使用的是魔改版的NVIDIA 2080 Ti 22G显卡,发现在模型训练过程中,跑着跑着就报错了,具体如下: raceback (most recent call last): File "/home/laumy/lerobot/./src/lerobot/scripts/train.py", line 291, in <module> …
设备查询 本文是记录ubuntu系统lerobot试验的快捷命令,方便开始负责执行设备,不会介绍为什么? python -m lerobot.find_port sudo chmod +666 /dev/ttyACM0 /dev/ttyACM1 python -m lerobot.find_cameras 机器标定 从臂标定 python -m …