什么是ROS:机器人操作系统快览随记
ROS的秘诀
梳理出有什么节点,每个节点的输入和输出是什么?
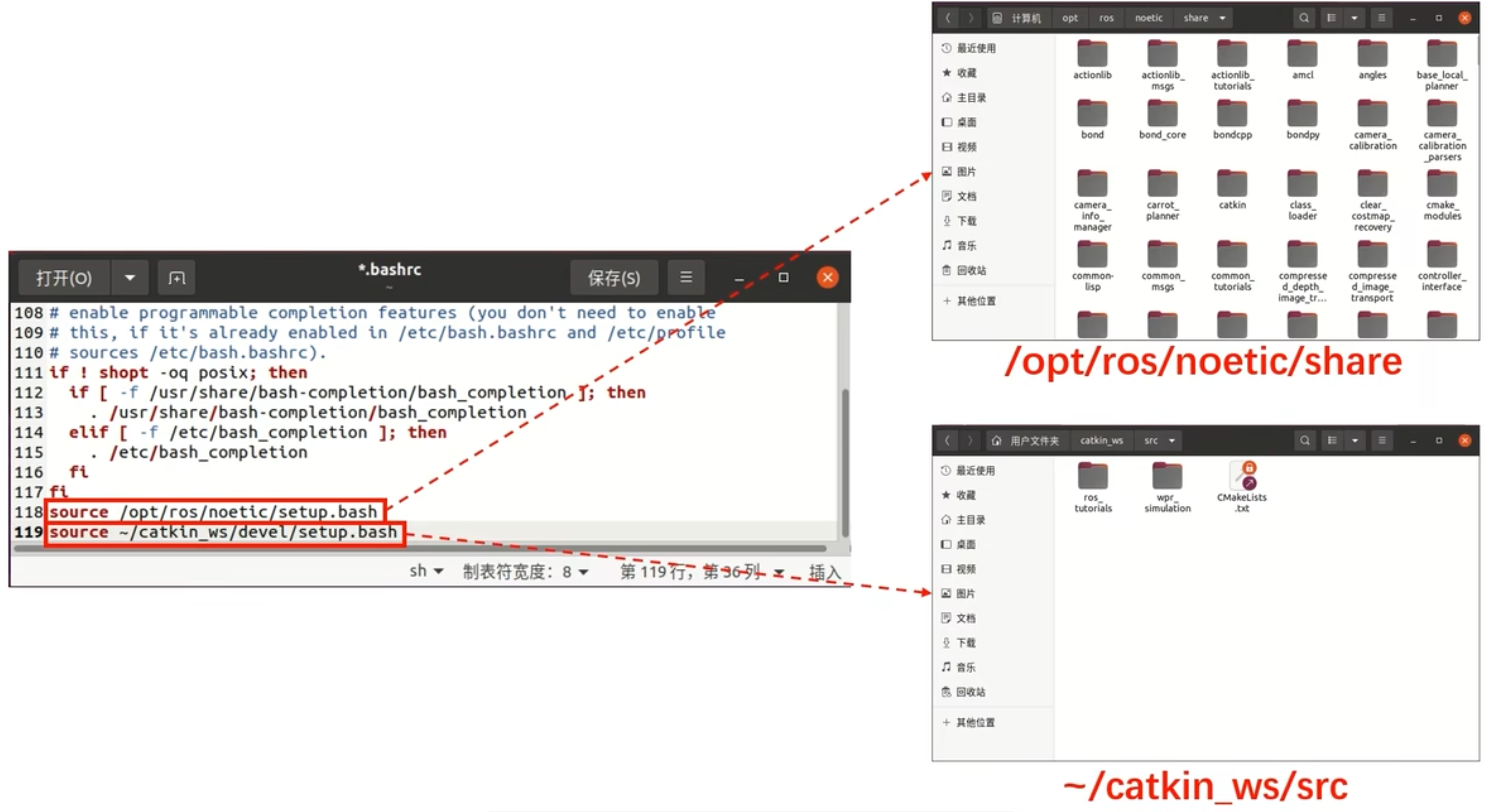
环境搭建
catkin
vscode
ROS插件、bracket pair colorizer 2
terminator
sudo apt install terminator
CRTL+ALT+T启动
CRTL+SHIFT+E左右分屏
CRTL+SHIFT+O上下分屏
CRTL+SHIFT+W关闭窗口
程序
基础单元node
节点的容器packege,以packege安装节点,packege里面有多个节点。节点不能脱离packege存在。
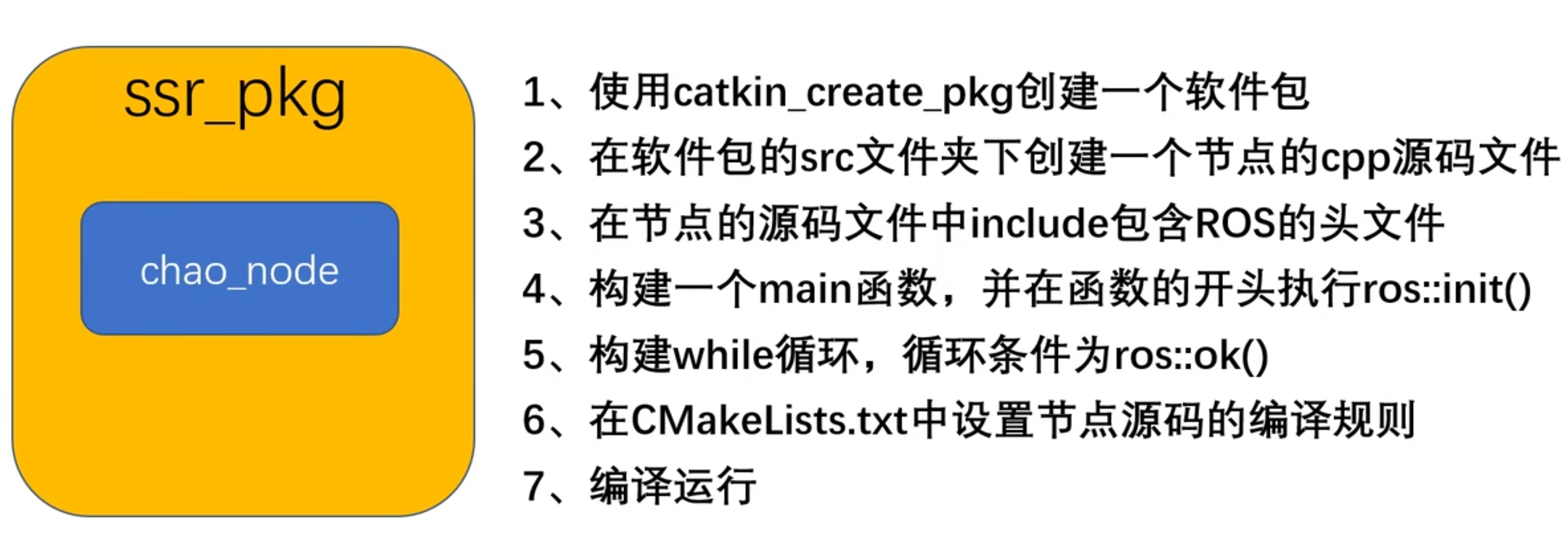
编写节点步骤
订阅与发布
多个节点直接的信息交互

跟MQTT机制类似。
消息类型,bool、byte、float…….可上官网查看https://index.ros.org
发布者
步骤:
1. 确定话题名称和消息类型
2. 包含消息类型的头文件。
3. 通过NodeHandler大管家发布一个话题获得消息发送对象。
4. 生成要发送的消息包并进行发送数据复制。
5. 调用消息发送对象publish函数发布消息。
常用工具:
rostopic list 列出当前系统所有活跃的话题
rostopic echo <主题名称> 显示话题中发送的消息包内容
rostopic hz 查看话题发布频率
订阅者
步骤:
1. 确定话题名称和消息类型。
2. 包含ros.h和消息类型对应头文件。
3. 通过NodeHandler订阅一个话题并设置一个消息接收回调。
4. 定义一个回调函数。
5. main函数中执行ros::spinOnce(),在while循环中可以响应接收消息。
常用工具:rqt_graph 查看ROS中节点,通讯关系。
launch
可以支持一下启动多个节点,使用xml来描述。

- 使用launch文件,可以通过roslaunch指令一次启动多个节点。
- 在lauch文件中,为节点添加output=”screen”属性,可以让节点信息输出终端。
- 在launch文件中,为节点添加launch-prefix=”gnome-terminal -e”属性,可以让节点单独运行在一个独立终端中。
可以通过launch文件来分析工程代码。
python方式
使用python的方式,只需要开始的时候编译一次,同步一下环境就行,后续就不用编译了,因为python是脚本,不需要编译。
机器的运动控制
线性方向:X,Y,Z坐标值。
角度控制:X,Y,Z方向旋转角度。
使用wbr_simulation,要控制机器人就发送消息就行了,消息类型就是线性方向+角度
要控制对主题/cmd_vel发布指令即可。
RViz
激光雷达原理,发射红外,接收红外,通过光速与时间计算障碍物距离,360°旋转。
Rviz是观测传感器数据,显示到仿真界面中。
激光雷达
激光雷达的数据包格式
float32[] ranges #一个数组,每个角度对应的测试距离。共360
float32[] ranges # 每个角度的信号强度,强度越高对上上面的测试距离越可信
如何获取到雷达测距数据?
使用wbr_simulation,订阅/scan话题即可获取到雷达数据。激光雷达每扫描一圈,就会调用一次注册订阅的话题回调函数。
如何实现运动避障的效果?
订阅/scan获取雷达测试数据,对/cmd_vel主题进行发布控制。当发现测距比较近的时候,就发布控制指令进行调整。
IMU
用于测量空间姿态,也就是陀螺仪。
消息包格式
- imu/data_raw( sensor_msgs/Imu):加速度输出的矢量加速度、陀螺仪输出的旋转角速度
- imu/data(sensor_msgs/imu):对矢量加速度和旋转角速度融合后的4元素姿态描述。最后可以通过这4元素计算出欧拉角度。
- imu/mag(sensor_msgs/MagneticField):磁强计输出数据。
ros中怎么获取数据?订阅/imu/data主题得到4元素,然后通过FT计算欧拉角,得到相对X,Y,Z的旋转角度。
航向锁定的实验
获取到朝向角后,然后通过/cmd_vel发布主题进行控制。
ROS消息包
- 标准消息包:std_msgs,包含数值类型、数组类型、结构体类型。
- 常规消息包:common_msgs,包括(sensor_msgs)传感器消息包、(geometry_msgs)几何消息包、(nav_msgs)导航消息包等等。
- 自定义消息包:根据基本的消息包类型来构建消息。需要按照ros规则来创建一个.msg的文件, rosmsg show xxx显示。
栅格地图:map_server
获取/map主题,获取栅格坐标格式为nav_msgs/OccupancyGird,可以和RVIZ进行联动显示。
SLAM
simultaneous localization and mapping 同时定位与地图构建
如何建图原理?
先确定一个参考位置,然后进行移动,每移动一个位置获得一个图,这个图可以是用视觉识别的物体、雷达探测障碍物等方式,然后通过每个位置获得的图进行拼接合并,以此获取到全局的地图。
在ros系统中如何获取地图
激光雷电 发布/scan-> Slam节点获取处理 发布/map->RViz显示
hector_mapping开源的slam算法
TF
TransForm描述两个坐标系的空间关系,坐标变化关系。简单理解就是机器人相对参考坐标的位置关系
由TF发布节点,通过/tf主题来发布。
结合里程计的 gmaping建图算法。
导航
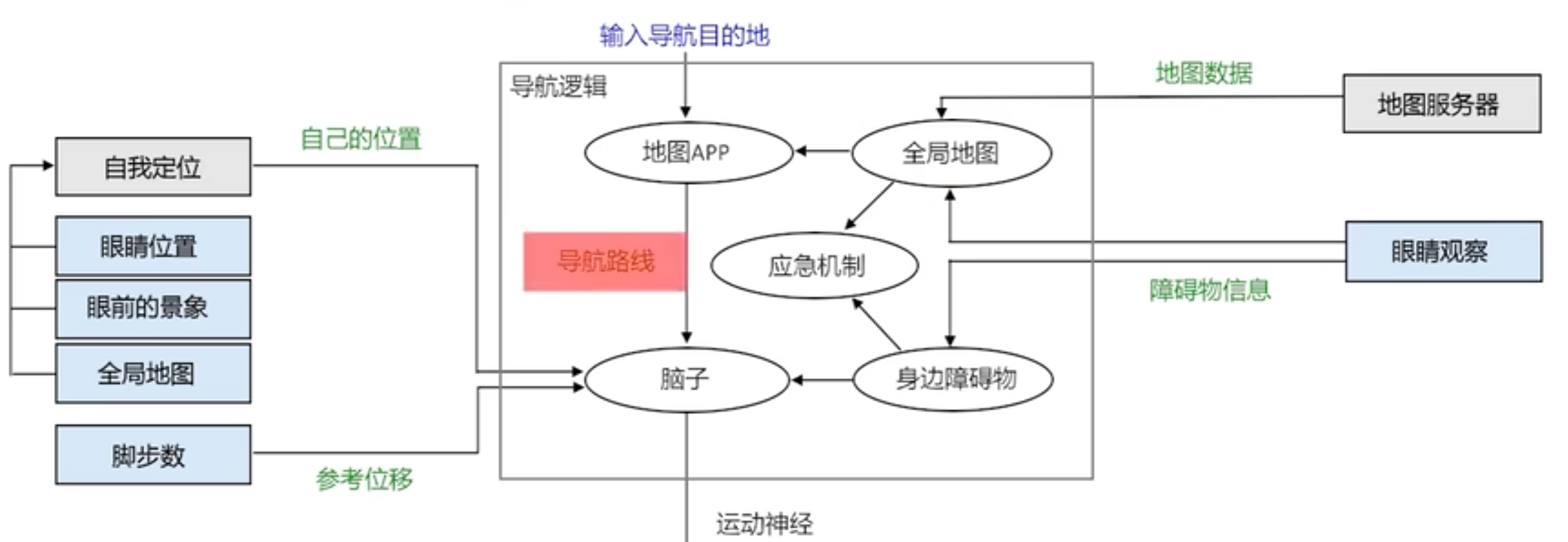
详细的官方图
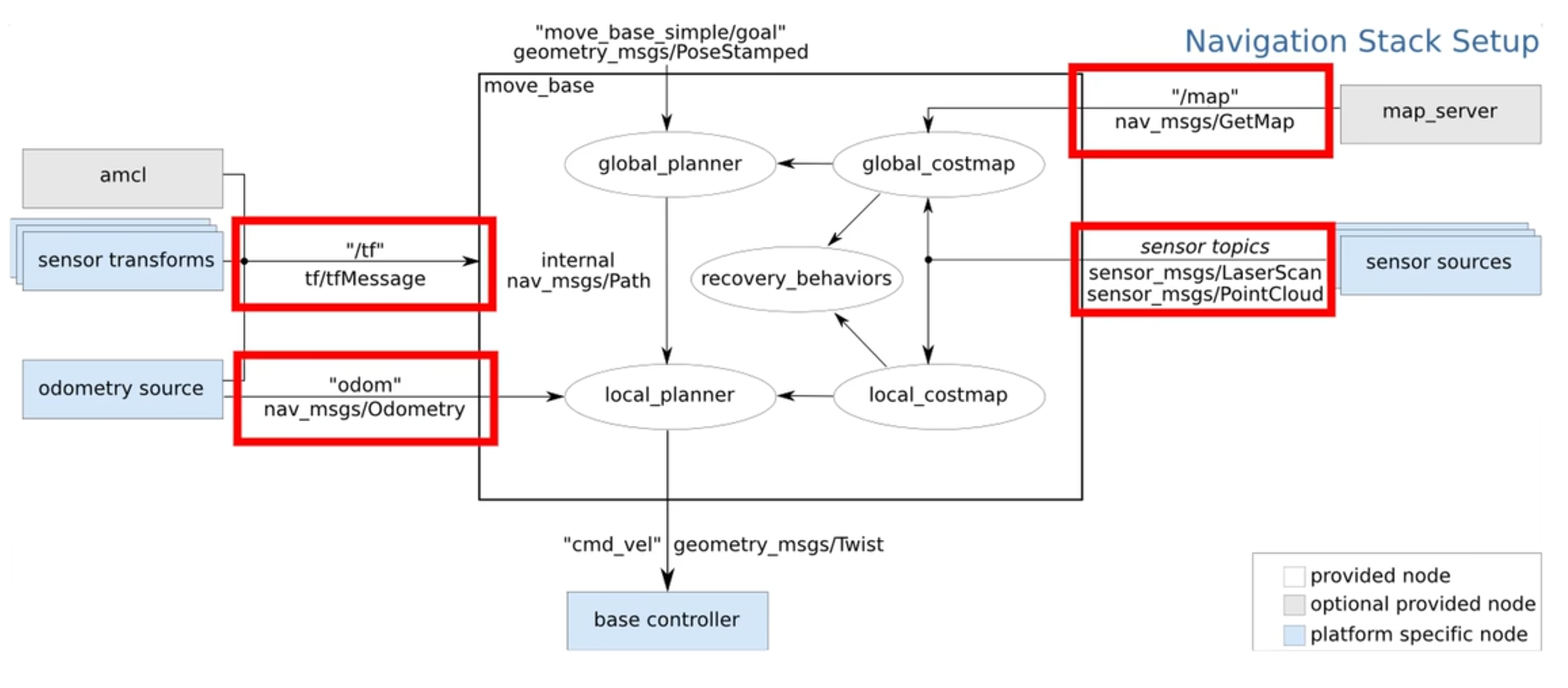
规划器
先使用目标点生成一个导航路线,然后按照导航路线走,在过程中遇到障碍物则进行避障。在move_base中提供了不同风格的规划器拥有规划路线如Dijkstra算法、A*算法。
定位算法
接着需要知道机器人的具体位置,知道具体的位置才能跟着导航路线走,这就需要定位节点如AMCL算法。
代价地图
代价地图,因为导航路线规划有时候的最短路径没有考虑机器人的尺寸,可能会导致机器人沿着墙边走而导致卡住,代价地图就是把障碍物线设置一个虚拟的安全距离(也可以说是把障碍物膨胀变大些)。全局代价地图和全局代价地图。
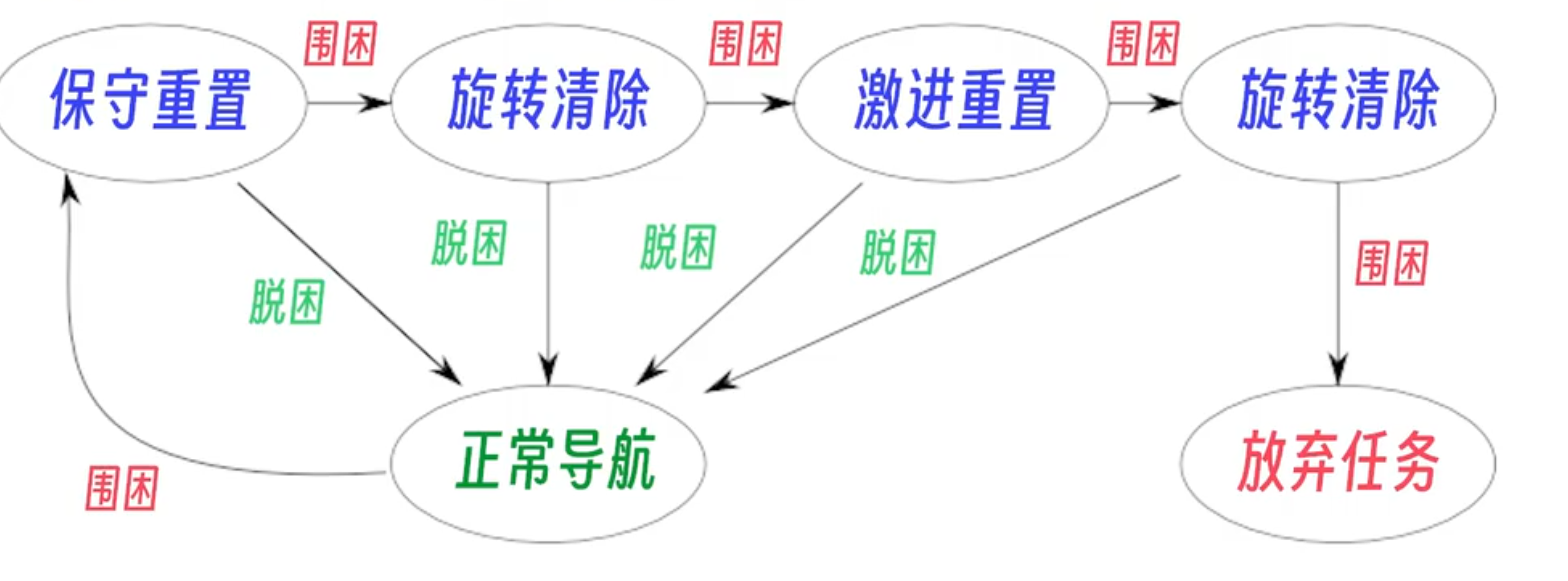
恢复行为
机器在运动过程中遇到了障碍物导致不能行动,会进入应急机制重新进行规划路线。
局部规划器
DWA、TEB、WpbhLocalPlanner等等。
ACTION
action是节点通信的另外一种方式,与订阅/发布不同而是可以双向传输,传输的双方分别是client和Server。client向server发送信息后,server可以持续不断的通知返回信息。
如:可以通过action接口来调用move_base设置导航的功能。client发送导航的目的地,然后server按照目的地运动,client阻塞等待server的回复,当server到达目的时返回结果。
航点的目的地,不用口算、目测;具体的导航目的地可以用插件获取,如waterplus_map_tools。可以将导航插件写到launch。
ROS相机
- /image_raw主题:相机原始数据
- /image_color:相机的彩色图像
- /image_color_rect:畸变校正后的彩色图像。
- /camera_info:相机相关的参数。
获取到图像后可以调用opencv处理图像,如果要做目标跟随,可以找出目标的坐标,然后跟随运动。