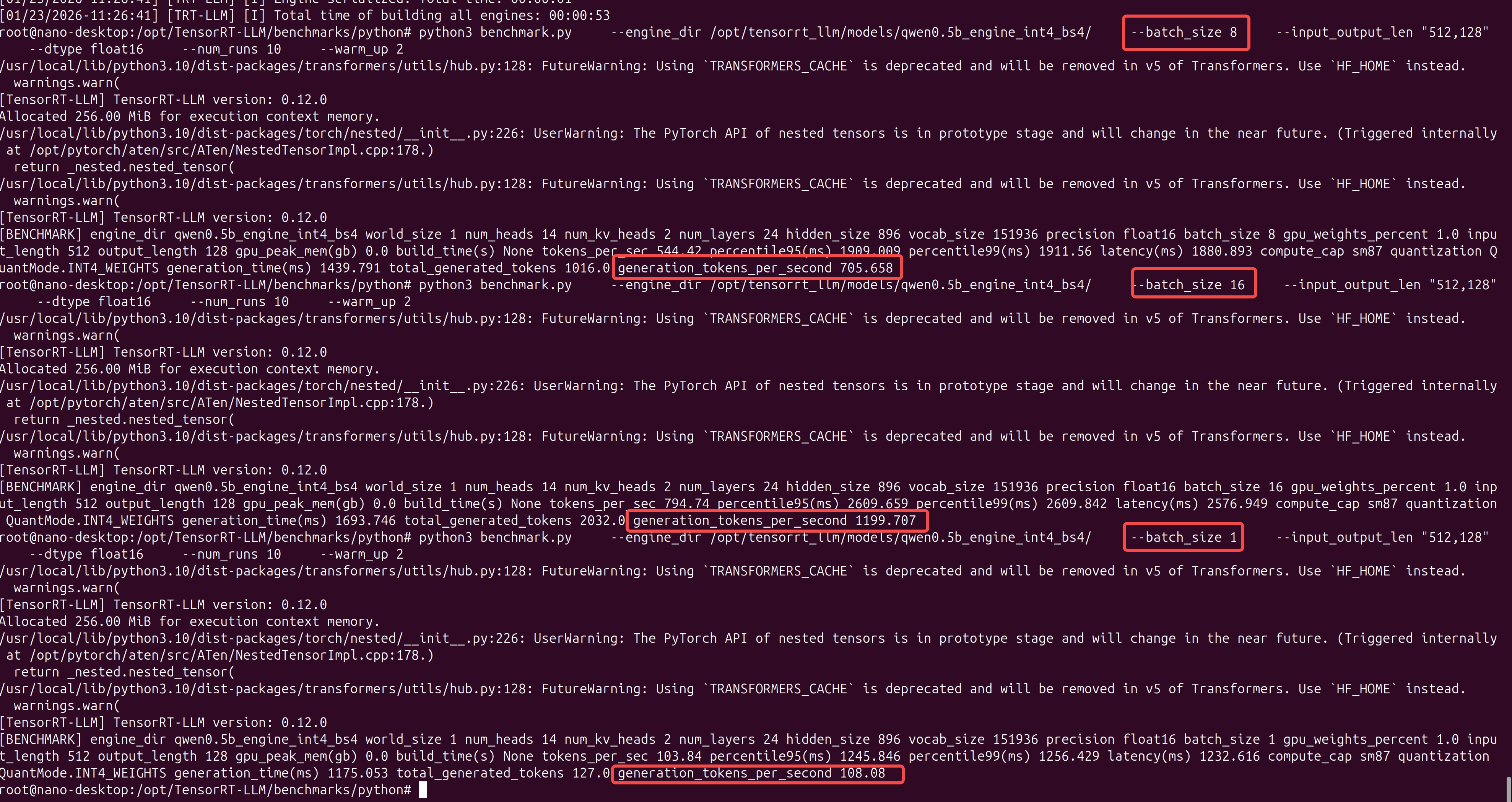
Ai应用
-
jetson orin nano使用TensorRT-LLM跑大模型
准备 硬件信息 硬件信息如下: sudo cat /proc/device-tree/model NVIDIA Jetson Orin NX Enginejetson_releasee Developer Kit(base) nano@nano-desktop:~$ jetson_release Software part of jetson-stats 4.3.2 - (c) 2024, Raffaello Bonghi Model: NVIDIA Jetson Orin NX Engineering Reference Developer Kit - Jetpack 6.2 [L4T 36.4.3] NV Power Mode[0]: 15W Serial Number: [XXX Show with: jetson_release -s XXX] Hardware: - P-Number: p3767-0003 - Module: NVIDIA Jetson Orin Nano (8GB ram) Platform: - Distribution: Ubuntu 22.04 Jammy Jellyfish - Release: 5.15.148-tegra jtop: - Version: 4.3.2 - Service: Active 超级模式 设置电源为超级性能模式,点击 Ubuntu 桌面顶部栏右侧的 NVIDIA 图标 Power mode 0: 15W 1: 25W 2: MAXN SUPER 如果没有MAXN SUPER,执行下面的命令安装。 sudo apt remove nvidia-l4t-bootloader sudo apt install nvidia-l4t-bootloader sudo reboot 如果还是无法配置的话,参考下:super mode 安装docker 本文主要使用https://github.com/dusty-nv/jetson-containers docker来进行部署测试,免去不少的环境搭建过程。 如果设备没有安装docker,执行下面命令进行安装docker。 sudo apt-get update sudo apt-get install -y docker.io nvidia-container-toolkit sudo usermod -aG docker $USER sudo systemctl daemon-reload sudo systemctl restart docker 接着容器启动拉取代码,然后拉取docker镜像: git clone https://github.com/dusty-nv/jetson-containers.git ./jetson-containers/run.sh -v $(pwd)/model_zoo:/opt/tensorrt_llm/models $(autotag tensorrt_llm) 下载模型 先下载一个模型 # Qwen 1.5B modelscope download --model Qwen/Qwen2.5-1.5B-Instruct --local_dir model_zoo/Qwen2.5-1.5B-Instruct # Qwen 0.5B modelscope download --model Qwen/Qwen2.5-0.5B-Instruct --local_dir model_zoo/Qwen2.5-0.5B-Instruct #DeepSeek 1.5B modelscope download --model deepseek-ai/DeepSeek-R1-Distill-Qwen-1.5B --local_dir model_zoo/DeepSeek-R1-Distill-Qwen-1.5B qwen2.5-0.5B INT4 启动容器 ./jetson-containers/run.sh -v $(pwd)/model_zoo:/opt/tensorrt_llm/models $(autotag tensorrt_llm) 转换模型 使用TensorRT-LLM提供的工具进行量化 cd /opt/TensorRT-LLM/examples/qwen python3 convert_checkpoint.py \ --model_dir /opt/tensorrt_llm/models/Qwen2.5-0.5B-Instruct/ \ --output_dir /opt/tensorrt_llm/models/qwen0.5b_ckpt_int4/ \ --dtype float16 \ --use_weight_only \ --weight_only_precision int4 参数,作用说明 model_dir:源模型路径,指向原始 Qwen2.5-1.5B-Instruct的文件夹。 output_dir:输出路径,转换后的 TensorRT-LLM 格式权重将保存在此目录下。 dtype float16:计算精度,设置模型在推理时的基础数据类型为 float16(半精度)。 use_weight_only:启用仅权重处理,告诉脚本不要修改激活值(Activations),只处理权重部分。 weight_only_precision int4:量化等级,将权重从 FP16 压缩到 INT4。这意味着权重占用的空间将缩小为原来的约 1/4。 weight_only_precision和dtype的区别是,前者模型权重以 INT4 格式存放在显存里(非常省空间)。后者了是实际运算用的精度,动态解压 (Dequantization),当 GPU 准备计算某一层的矩阵乘法时,它会实时地将这一层的 INT4 权重“恢复”成 float16。 构建引擎 构建引擎 trtllm-build --checkpoint_dir /opt/tensorrt_llm/models/qwen0.5b_ckpt_int4/ \ --output_dir /opt/tensorrt_llm/models/qwen0.5b_engine_int4_bs4/ \ --gemm_plugin float16 \ --gpt_attention_plugin float16 \ --max_batch_size 4 \ --max_input_len 1024 \ --max_seq_len 1024 \ --workers 1 测试性能 压力测试 cd /opt/TensorRT-LLM/benchmarks/python # 运行 Batch Size 4 的测试 python3 benchmark.py \ --engine_dir /opt/tensorrt_llm/models/qwen0.5b_engine_int4_bs4/ \ --batch_size 4 \ --input_output_len "512,128" \ --dtype float16 \ --num_runs 10 \ --warm_up 2 engine_dir:指定 Engine 路径,指向已编译好的 TensorRT-LLM Engine。从路径名 qwen0.5b_engine_int4_bs4 可以推断,这个模型是 Qwen-0.5B,采用了 INT4 量化,且构建时设定的最大 Batch Size 为 4。 batch_size: 4,推理并发数,本次测试同时处理 4 个请求。这会直接测试芯片在满载(Full Load)状态下的性能。由于你的 Engine 编译时 max_batch_size 可能是 4,所以这里设置 4 是为了榨干该 Engine 的性能。 input_output_len: "512,128"",输入输出长度,512:输入 Prompt 的长度(影响 PP 阶段)。128:生成 Token 的长度(影响 TG 阶段)。这是一个非常标准的测试组合,模拟了“中等长度提问 + 短回答”的场景。 dtype: float16,计算精度,即使权重是 INT4 存储,实际矩阵运算(Activation)依然使用 FP16。这能保证在利用 INT4 节省显存的同时,推理精度不崩溃。 num_runs: 10,循环次数,连续运行 10 次。取平均值可以消除系统波动(如 CPU 调度、瞬时过热降频)带来的误差,使测试结果更具统计学意义。 warm_up: 2,预热次数,忽略前 2 次的成绩。GPU 在刚开始跑的时候需要进行内存申请、显存对齐等操作,通常第一遍会非常慢。预热可以确保获取的是稳定状态(Steady State)下的真实性能。 qwen2.5-1.5B INT4 启动容器 ./jetson-containers/run.sh -v $(pwd)/model_zoo:/opt/tensorrt_llm/models $(autotag tensorrt_llm) 转换模型 使用TensorRT-LLM提供的工具进行量化,如果内存不够就到PC上去做量化,见下。 cd /opt/TensorRT-LLM/examples/qwen python3 convert_checkpoint.py \ --model_dir /opt/tensorrt_llm/models/Qwen2.5-1.5B-Instruct/ \ --output_dir /opt/tensorrt_llm/models/qwen1.5b_ckpt_int4/ \ --dtype float16 \ --use_weight_only \ --weight_only_precision int4 构建引擎 构建引擎 trtllm-build \ --checkpoint_dir /opt/tensorrt_llm/models/qwen3b_ckpt_int4 \ --output_dir /opt/tensorrt_llm/models/qwen3b_int4_bs1_engine \ --gemm_plugin float16 \ --gpt_attention_plugin float16 \ --max_batch_size 1 \ --max_input_len 1024 \ --max_seq_len 1024 \ --workers 1 如果内存不够的话就把max_batch_size改小一点。 测试对话 python3 ../run.py \ --engine_dir /opt/tensorrt_llm/models/qwen1.5b_int4_bs1_engine/ \ --tokenizer_dir /opt/tensorrt_llm/models/Qwen2.5-3B-Instruct/ \ --max_output_len 128 \ --input_text "你好,请介绍一下你自己,并讲一个关于芯片工程师的冷笑话。" 测试性能 压力测试 cd /opt/TensorRT-LLM/benchmarks/python # 运行 Batch Size 1 的测试 python3 benchmark.py \ --engine_dir /opt/tensorrt_llm/models/qwen1.5b_engine_int4_bs4/ \ --batch_size 1 \ --input_output_len "128,128" \ --dtype float16 \ --num_runs 10 \ --warm_up 2 qwen2.5-3B INT4 启动容器 ./jetson-containers/run.sh -v $(pwd)/model_zoo:/opt/tensorrt_llm/models $(autotag tensorrt_llm) 转换模型 使用TensorRT-LLM提供的工具进行量化,如果内存不够就到PC上去做量化,见下。 python3 convert_checkpoint.py \ --model_dir /data/Qwen2.5-3B-Instruct/ \ --output_dir /data/qwen3b_ckpt_int4 \ --dtype float16 \ --use_weight_only \ --weight_only_precision int4 构建引擎 构建引擎 base) nano@nano-desktop:~$ docker run --runtime nvidia -it --rm \ --network host \ --shm-size=8g \ --volume /home/nano/model_zoo:/opt/tensorrt_llm/models \ --workdir /opt/tensorrt_llm/examples/qwen \ dustynv/tensorrt_llm:0.12-r36.4.0 \ /bin/bash -c "export TRT_MAX_WORKSPACE_SIZE=1073741824 && \ trtllm-build \ --checkpoint_dir /opt/tensorrt_llm/models/qwen3b_ckpt_int4 \ --output_dir /opt/tensorrt_llm/models/qwen3b_int4_bs1_engine \ --gemm_plugin float16 \ --gpt_attention_plugin float16 \ --max_batch_size 1 \ --max_seq_len 1024 \ --workers 1 \ --builder_opt 1" /usr/local/lib/python3.10/dist-packages/transformers/utils/hub.py:128: FutureWarning: Using `TRANSFORMERS_CACHE` is deprecated and will be removed in v5 of Transformers. Use `HF_HOME` instead. warnings.warn( [TensorRT-LLM] TensorRT-LLM version: 0.12.0 [01/24/2026-04:10:02] [TRT-LLM] [I] Set bert_attention_plugin to auto. [01/24/2026-04:10:02] [TRT-LLM] [I] Set gpt_attention_plugin to float16. [01/24/2026-04:10:02] [TRT-LLM] [I] Set gemm_plugin to float16. [01/24/2026-04:10:02] [TRT-LLM] [I] Set gemm_swiglu_plugin to None. [01/24/2026-04:10:02] [TRT-LLM] [I] Set fp8_rowwise_gemm_plugin to None. [01/24/2026-04:10:02] [TRT-LLM] [I] Set nccl_plugin to auto. [01/24/2026-04:10:02] [TRT-LLM] [I] Set lookup_plugin to None. [01/24/2026-04:10:02] [TRT-LLM] [I] Set lora_plugin to None. [01/24/2026-04:10:02] [TRT-LLM] [I] Set moe_plugin to auto. [01/24/2026-04:10:02] [TRT-LLM] [I] Set mamba_conv1d_plugin to auto. [01/24/2026-04:10:02] [TRT-LLM] [I] Set context_fmha to True. [01/24/2026-04:10:02] [TRT-LLM] [I] Set bert_context_fmha_fp32_acc to False. [01/24/2026-04:10:02] [TRT-LLM] [I] Set paged_kv_cache to True. [01/24/2026-04:10:02] [TRT-LLM] [I] Set remove_input_padding to True. [01/24/2026-04:10:02] [TRT-LLM] [I] Set reduce_fusion to False. [01/24/2026-04:10:02] [TRT-LLM] [I] Set enable_xqa to True. [01/24/2026-04:10:02] [TRT-LLM] [I] Set tokens_per_block to 64. [01/24/2026-04:10:02] [TRT-LLM] [I] Set use_paged_context_fmha to False. [01/24/2026-04:10:02] [TRT-LLM] [I] Set use_fp8_context_fmha to False. [01/24/2026-04:10:02] [TRT-LLM] [I] Set multiple_profiles to False. [01/24/2026-04:10:02] [TRT-LLM] [I] Set paged_state to True. [01/24/2026-04:10:02] [TRT-LLM] [I] Set streamingllm to False. [01/24/2026-04:10:02] [TRT-LLM] [W] Implicitly setting QWenConfig.qwen_type = qwen2 [01/24/2026-04:10:02] [TRT-LLM] [W] Implicitly setting QWenConfig.moe_intermediate_size = 0 [01/24/2026-04:10:02] [TRT-LLM] [W] Implicitly setting QWenConfig.moe_shared_expert_intermediate_size = 0 [01/24/2026-04:10:02] [TRT-LLM] [I] Set dtype to float16. [01/24/2026-04:10:02] [TRT-LLM] [W] remove_input_padding is enabled, while opt_num_tokens is not set, setting to max_batch_size*max_beam_width. [01/24/2026-04:10:02] [TRT-LLM] [W] max_num_tokens (1024) shouldn't be greater than max_seq_len * max_batch_size (1024), specifying to max_seq_len * max_batch_size (1024). [01/24/2026-04:10:02] [TRT-LLM] [W] padding removal and fMHA are both enabled, max_input_len is not required and will be ignored [01/24/2026-04:10:02] [TRT] [I] [MemUsageChange] Init CUDA: CPU +12, GPU +0, now: CPU 164, GPU 1447 (MiB) [01/24/2026-04:10:05] [TRT] [I] [MemUsageChange] Init builder kernel library: CPU +947, GPU +1133, now: CPU 1154, GPU 2594 (MiB) [01/24/2026-04:10:05] [TRT] [W] profileSharing0806 is on by default in TensorRT 10.0. This flag is deprecated and has no effect. [01/24/2026-04:10:05] [TRT-LLM] [I] Set weight_only_quant_matmul_plugin to float16. [01/24/2026-04:10:05] [TRT-LLM] [I] Set nccl_plugin to None. [01/24/2026-04:10:06] [TRT-LLM] [I] Total optimization profiles added: 1 [01/24/2026-04:10:06] [TRT-LLM] [I] Build TensorRT engine Unnamed Network 0 [01/24/2026-04:10:06] [TRT] [W] DLA requests all profiles have same min, max, and opt value. All dla layers are falling back to GPU [01/24/2026-04:10:06] [TRT] [W] Unused Input: position_ids [01/24/2026-04:10:06] [TRT] [W] [RemoveDeadLayers] Input Tensor position_ids is unused or used only at compile-time, but is not being removed. [01/24/2026-04:10:06] [TRT] [I] Global timing cache in use. Profiling results in this builder pass will be stored. [01/24/2026-04:10:06] [TRT] [I] Compiler backend is used during engine build. [01/24/2026-04:10:11] [TRT] [I] [GraphReduction] The approximate region cut reduction algorithm is called. [01/24/2026-04:10:11] [TRT] [I] Detected 15 inputs and 1 output network tensors. NvMapMemAllocInternalTagged: 1075072515 error 12 NvMapMemHandleAlloc: error 0 NvMapMemAllocInternalTagged: 1075072515 error 12 NvMapMemHandleAlloc: error 0 [01/24/2026-04:10:20] [TRT] [E] [resizingAllocator.cpp::allocate::74] Error Code 1: Cuda Runtime (out of memory) [01/24/2026-04:10:20] [TRT] [W] Requested amount of GPU memory (1514557910 bytes) could not be allocated. There may not be enough free memory for allocation to succeed. [01/24/2026-04:10:20] [TRT] [E] [globWriter.cpp::makeResizableGpuMemory::433] Error Code 2: OutOfMemory (Requested size was 1514557910 bytes.) Traceback (most recent call last): File "/usr/local/bin/trtllm-build", line 8, in <module> sys.exit(main()) File "/usr/local/lib/python3.10/dist-packages/tensorrt_llm/commands/build.py", line 500, in main parallel_build(model_config, ckpt_dir, build_config, args.output_dir, File "/usr/local/lib/python3.10/dist-packages/tensorrt_llm/commands/build.py", line 377, in parallel_build passed = build_and_save(rank, rank % workers, ckpt_dir, File "/usr/local/lib/python3.10/dist-packages/tensorrt_llm/commands/build.py", line 344, in build_and_save engine = build_model(build_config, File "/usr/local/lib/python3.10/dist-packages/tensorrt_llm/commands/build.py", line 337, in build_model return build(model, build_config) File "/usr/local/lib/python3.10/dist-packages/tensorrt_llm/builder.py", line 1060, in build engine = None if build_config.dry_run else builder.build_engine( File "/usr/local/lib/python3.10/dist-packages/tensorrt_llm/_common.py", line 204, in decorated return f(*args, **kwargs) File "/usr/local/lib/python3.10/dist-packages/tensorrt_llm/builder.py", line 411, in build_engine assert engine is not None, 'Engine building failed, please check the error log.' AssertionError: Engine building failed, please check the error log. 内存不够,测不了了...... DeepSeek R1-1.5B 启动容器 ./jetson-containers/run.sh -v $(pwd)/model_zoo:/opt/tensorrt_llm/models $(autotag tensorrt_llm) 转换模型 使用TensorRT-LLM提供的工具进行量化,如果内存不够就到PC上去做量化,见下。 cd /opt/TensorRT-LLM/examples/qwen python3 convert_checkpoint.py \ --model_dir /data/DeepSeek-R1-Distill-Qwen-1.5B/ \ --output_dir /data/deepseek_r1_1.5b_ckpt_int4 \ --dtype float16 \ --use_weight_only \ --weight_only_precision int4 构建引擎 构建引擎 trtllm-build \ --checkpoint_dir /opt/tensorrt_llm/models/deepseek_r1_1.5b_ckpt_int4 \ --output_dir /opt/tensorrt_llm/models/deepseek_r1_1.5b_int4_bs1_engine \ --gemm_plugin float16 \ --gpt_attention_plugin float16 \ --max_batch_size 1 \ --max_input_len 1024 \ --max_seq_len 1024 \ --workers 1 如果内存不够的话就把max_batch_size改小一点。 测试对话 cd /opt/TensorRT-LLM/examples/qwen python3 ../run.py \ --engine_dir /opt/tensorrt_llm/models/deepseek_r1_1.5b_int4_bs1_engine/ \ --tokenizer_dir /opt/tensorrt_llm/models/DeepSeek-R1-Distill-Qwen-1.5B/ \ --max_output_len 128 \ --input_text "你好,请介绍一下你自己,并讲一个关于芯片工程师的冷笑话。" 测试性能 压力测试 cd /opt/TensorRT-LLM/benchmarks/python # 运行 Batch Size 1 的测试 python3 benchmark.py \ --engine_dir /opt/tensorrt_llm/models/deepseek_r1_1.5b_int4_bs1_engine/ \ --batch_size 1 \ --input_output_len "512,128" \ --dtype float16 \ --num_runs 10 \ --warm_up 2 在PC上做量化 由于在jetson nano上做量化,内存不足,可以考虑在PC上做量化,然后把模型拷贝到设备中去。由于容器内使用的python是3.12,所以我们安装一个PyTorch 24.02的容器。 安装量化环境 (1)启动容器 # 注意:镜像换成了 pytorch:24.02-py3,它是 Python 3.10 环境 docker run --rm -it --ipc=host --gpus all \ -v ~/model_zoo:/data \ -v ~/TensorRT-LLM:/code \ -w /code/examples/qwen \ nvcr.io/nvidia/pytorch:24.02-py3 bash (2)安装TensorRT-LLM 0.12.0 # 这一步会下载约 1GB 的包,请耐心等待 pip install tensorrt_llm==0.12.0 --extra-index-url https://pypi.nvidia.com (3)安装脚本依赖 pip install "transformers==4.38.2" safetensors accelerate (4)验证安装 python3 -c "import tensorrt_llm; print(tensorrt_llm.__version__)" # 输出应该是 0.12.0 过程中如果遇到问题,可以按照下面的办法处理 # 强制重装 TensorRT 相关的核心包 pip install --force-reinstall \ tensorrt==10.3.0 \ tensorrt-cu12==10.3.0 \ tensorrt-cu12-bindings==10.3.0 \ tensorrt-cu12-libs==10.3.0 export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/lib/python3.10/dist-packages/tensorrt_libs #卸载捣乱的 Flash Attention,不需要这个 pip uninstall -y flash-attn # 1. 卸载可能存在的冲突包 pip uninstall -y pynvml nvidia-ml-py # 2. 安装旧版 pynvml (11.4.1 是最稳定的旧版,完美兼容 0.12.0) pip install pynvml==11.4.1 转换模型 python3 convert_checkpoint.py \ --model_dir /data/Qwen2.5-1.5B-Instruct/ \ --output_dir /data/qwen1.5b_ckpt_int4 \ --dtype float16 \ --use_weight_only \ --weight_only_precision int4 然后可以拷贝到设备上。 # 确保 Jetson 上有这个目录 ssh nano@10.0.91.125 "mkdir -p ~/model_zoo" # 开始传输 (PC -> Jetson) rsync -avP ~/model_zoo/qwen1.5b_ckpt_int4 nano@10.0.91.125:~/model_zoo/ 常见问题 找不到库 如果在模型转换的时候出现下面报错,先退出docker容器,安装下面的库 ImportError: libnvdla_compiler.so: cannot open shared object file: No such file or directory wget -O - https://repo.download.nvidia.com/jetson/common/pool/main/n/nvidia-l4t-dla-compiler/nvidia-l4t-dla-compiler_36.4.1-20241119120551_arm64.deb | dpkg-deb --fsys-tarfile - | sudo tar xv --strip-components=5 --directory=/usr/lib/aarch64-linux-gnu/nvidia/ ./usr/lib/aarch64-linux-gnu/nvidia/libnvdla_compiler.so 内存不足 禁用桌面图像界面,暂时禁用 $ sudo init 3 # stop the desktop # log your user back into the console (Ctrl+Alt+F1, F2, ect) $ sudo init 5 # restart the desktop 如果想重启也禁用 #禁用 sudo systemctl set-default multi-user.target #启用 sudo systemctl set-default graphical.target # 强行同步并释放缓存 sudo sh -c 'sync; echo 3 > /proc/sys/vm/drop_caches' 参考资料: jetson SDK jetson-ai-lab jetson官方数据 -
jetson orin nano使用llamap.cpp跑大模型
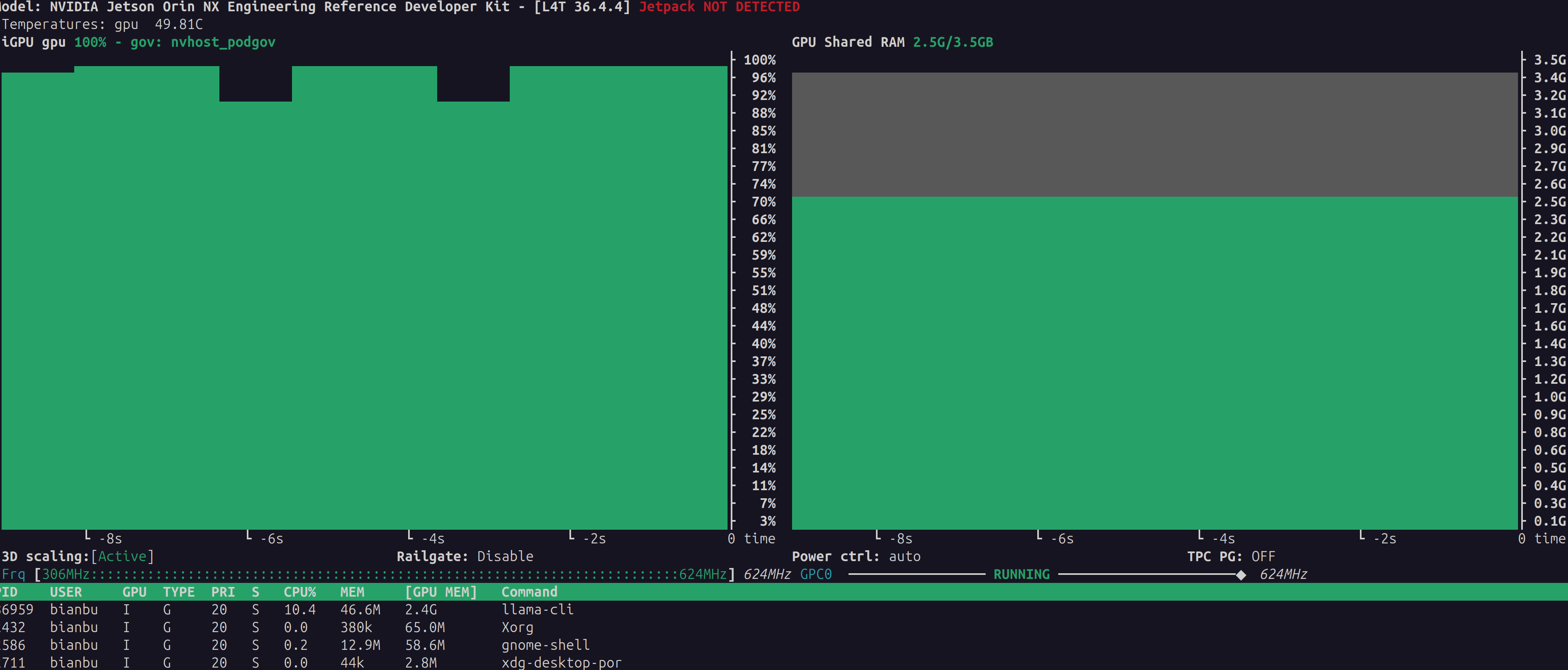
安装 确认一下是否有/usr/local/cuda/bin/nvcc,有就配置一下环境。 # 临时在当前终端生效 export PATH=/usr/local/cuda/bin:$PATH export LD_LIBRARY_PATH=/usr/local/cuda/lib64:$LD_LIBRARY_PATH # 验证 nvcc 是否能找到 nvcc --version 如果没有就安装 sudo -E apt install cuda-toolkit 下载代码 git clone https://github.com/ggerganov/llama.cpp cd llama.cpp 安装魔塔下载工具 pip install modelscope -i https://mirrors.aliyun.com/pypi/simple/ 编译 mkdir build cmake .. -DGGML_CUDA=ON cmake --build . --config Release -j $(nproc) 跑模型 低功耗模式 下载模型 mkdir model_zoo modelscope download --model Qwen/Qwen2.5-1.5B-Instruct-GGUF qwen2.5-1.5b-instruct-q4_0.gguf --local_dir ./model_zoo 测试模型 ./build/bin/llama-cli -m ../model_zoo/qwen2.5-1.5b-instruct-q4_0.gguf --perf --show-timings -lv 3 换个笑话 |slot get_availabl: id 0 | task -1 | selected slot by LCP similarity, sim_best = 0.952 (> 0.100 thold), f_keep = 1.000 slot launch_slot_: id 0 | task -1 | sampler chain: logits -> ?penalties -> ?dry -> ?top-n-sigma -> top-k -> ?typical -> top-p -> min-p -> ?xtc -> temp-ext -> dist slot launch_slot_: id 0 | task 184 | processing task, is_child = 0 slot update_slots: id 0 | task 184 | new prompt, n_ctx_slot = 4096, n_keep = 0, task.n_tokens = 248 slot update_slots: id 0 | task 184 | n_tokens = 236, memory_seq_rm [236, end) slot update_slots: id 0 | task 184 | prompt processing progress, n_tokens = 248, batch.n_tokens = 12, progress = 1.000000 slot update_slots: id 0 | task 184 | prompt done, n_tokens = 248, batch.n_tokens = 12 slot init_sampler: id 0 | task 184 | init sampler, took 0.11 ms, tokens: text = 248, total = 248 好的,以下是一个不同的笑话: 为什么电脑没有呼吸? 因为它只有一个输入口,一个输出口。slot print_timing: id 0 | task 184 | prompt eval time = 214.26 ms / 12 tokens ( 17.85 ms per token, 56.01 tokens per second) eval time = 1691.48 ms / 22 tokens ( 76.89 ms per token, 13.01 tokens per second) total time = 1905.74 ms / 34 tokens slot release: id 0 | task 184 | stop processing: n_tokens = 269, truncated = 0 srv update_slots: all slots are idle [ Prompt: 56.0 t/s | Generation: 13.0 t/s ] 看起来速度不是很快。 再跑一个3B的试试看。 ./build/bin/llama-cli -m ../model_zoo/qwen2.5-3b-instruct-q4_0.gguf --perf --show-timings -lv 3 prompt eval time = 1412.32 ms / 15 tokens ( 94.15 ms per token, 10.62 tokens per second) eval time = 48064.10 ms / 244 tokens ( 196.98 ms per token, 5.08 tokens per second) total time = 49476.41 ms / 259 tokens slot release: id 0 | task 148 | stop processing: n_tokens = 469, truncated = 0 srv update_slots: all slots are idle [ Prompt: 10.6 t/s | Generation: 5.1 t/s ] 看起来不太行。 加上个参数重新编译试试,针对CUDA的能力计算数值,加这个参数,llama.cpp 的 cmake 默认可能不会启用针对特定 GPU 架构的深度优化 rm -rf build && mkdir build && cd build cmake .. -DGGML_CUDA=ON -DCMAKE_CUDA_ARCHITECTURES=87 #或者cmake .. -DGGML_CUDA=ON -DCMAKE_CUDA_ARCHITECTURES=native cmake --build . --config Release -j$(nproc) 再测试执行: ./build/bin/llama-cli -m ../model_zoo/qwen2.5-3b-instruct-q4_0.gguf --perf --show-timings -lv 3 -ngl 99 prompt eval time = 201.92 ms / 13 tokens ( 15.53 ms per token, 64.38 tokens per second) eval time = 39903.36 ms / 386 tokens ( 103.38 ms per token, 9.67 tokens per second) total time = 40105.28 ms / 399 tokens slot release: id 0 | task 159 | stop processing: n_tokens = 598, truncated = 0 srv update_slots: all slots are idle [ Prompt: 64.4 t/s | Generation: 9.7 t/s ] 推理速度上来了,稳定在10 token/s。 再跑跑bench ./build/bin/llama-bench -m ../model_zoo/qwen2.5-3b-instruct-q4_0.gguf -ngl 99 ggml_cuda_init: found 1 CUDA devices: Device 0: Orin, compute capability 8.7, VMM: yes | model | size | params | backend | ngl | test | t/s | | ------------------------------ | ---------: | ---------: | ---------- | --: | --------------: | -------------------: | | qwen2 3B Q4_0 | 1.86 GiB | 3.40 B | CUDA | 99 | pp512 | 259.35 ± 0.46 | | qwen2 3B Q4_0 | 1.86 GiB | 3.40 B | CUDA | 99 | tg128 | 8.98 ± 0.03 | build: 37c35f0e1 (7787) (base) bianbu@ubuntu:~/llama.cpp$ sudo nvpmodel -m 0 # 开启最大功率模式 sudo jetson_clocks # 锁定 CPU/GPU/内存频率到最高 (base) bianbu@ubuntu:~/llama.cpp$ ./build/bin/llama-bench -m ../model_zoo/qwen2.5-3b-instruct-q4_0.gguf -ngl 99 ggml_cuda_init: found 1 CUDA devices: Device 0: Orin, compute capability 8.7, VMM: yes | model | size | params | backend | ngl | test | t/s | | ------------------------------ | ---------: | ---------: | ---------- | --: | --------------: | -------------------: | | qwen2 3B Q4_0 | 1.86 GiB | 3.40 B | CUDA | 99 | pp512 | 264.42 ± 0.27 | | qwen2 3B Q4_0 | 1.86 GiB | 3.40 B | CUDA | 99 | tg128 | 9.17 ± 0.01 | build: 37c35f0e1 (7787) 超级性能模式 上面跑了一下看起来还是很慢,看了一下jetson官网,要跑性能,需要设置电源为超级性能模式,点击 Ubuntu 桌面顶部栏右侧的 NVIDIA 图标 Power mode 0: 15W 1: 25W 2: MAXN SUPER 如果没有MAXN SUPER,执行下面的命令安装。 sudo apt remove nvidia-l4t-bootloader sudo apt install nvidia-l4t-bootloader sudo reboot 如果还是无法配置的话,参考下:super mode 接下来,接着跑。 ./build/bin/llama-cli -m ../model_zoo_gguf/model_zoo/qwen2.5-1.5b-instruct-q4_0.gguf --perf --show-timings -lv 3 -ngl 99 ./build/bin/llama-bench -m ../model_zoo_gguf/model_zoo/qwen2.5-1.5b-instruct-q4_0.gguf -ngl 99 在跑个3B的 ./build/bin/llama-bench -m ../model_zoo_gguf/model_zoo/qwen2.5-3b-instruct-q4_0.gguf -ngl 99 ./build/bin/llama-cli -m ../model_zoo_gguf/model_zoo/qwen2.5-3b-instruct-q4_0.gguf -ngl 99 --perf -lv 3 -
pipecat关键调用流程
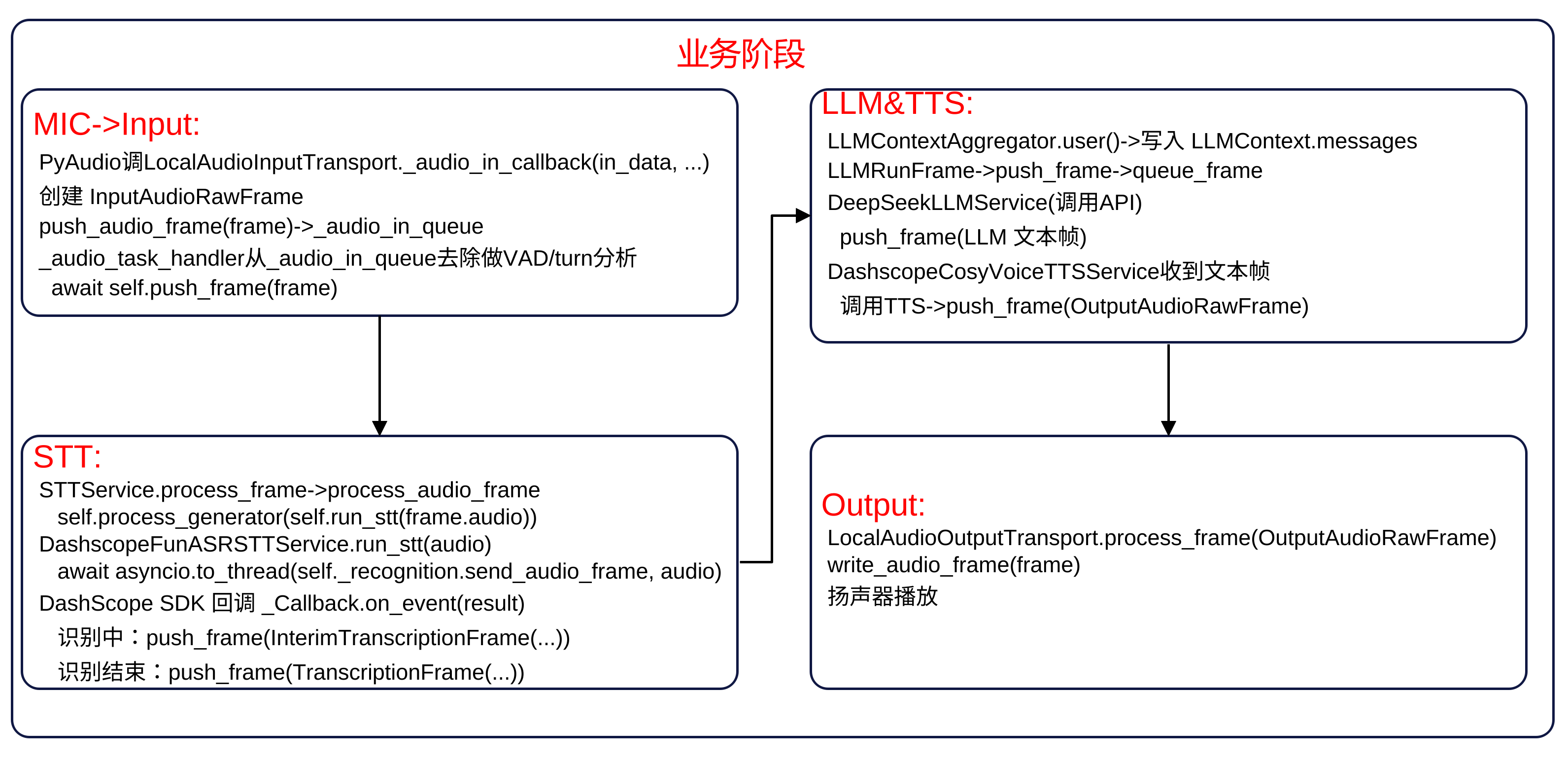
业务流 启动阶段 帧处理 -
Pipecat MCP 实战流程分析:从 Client 到 Server
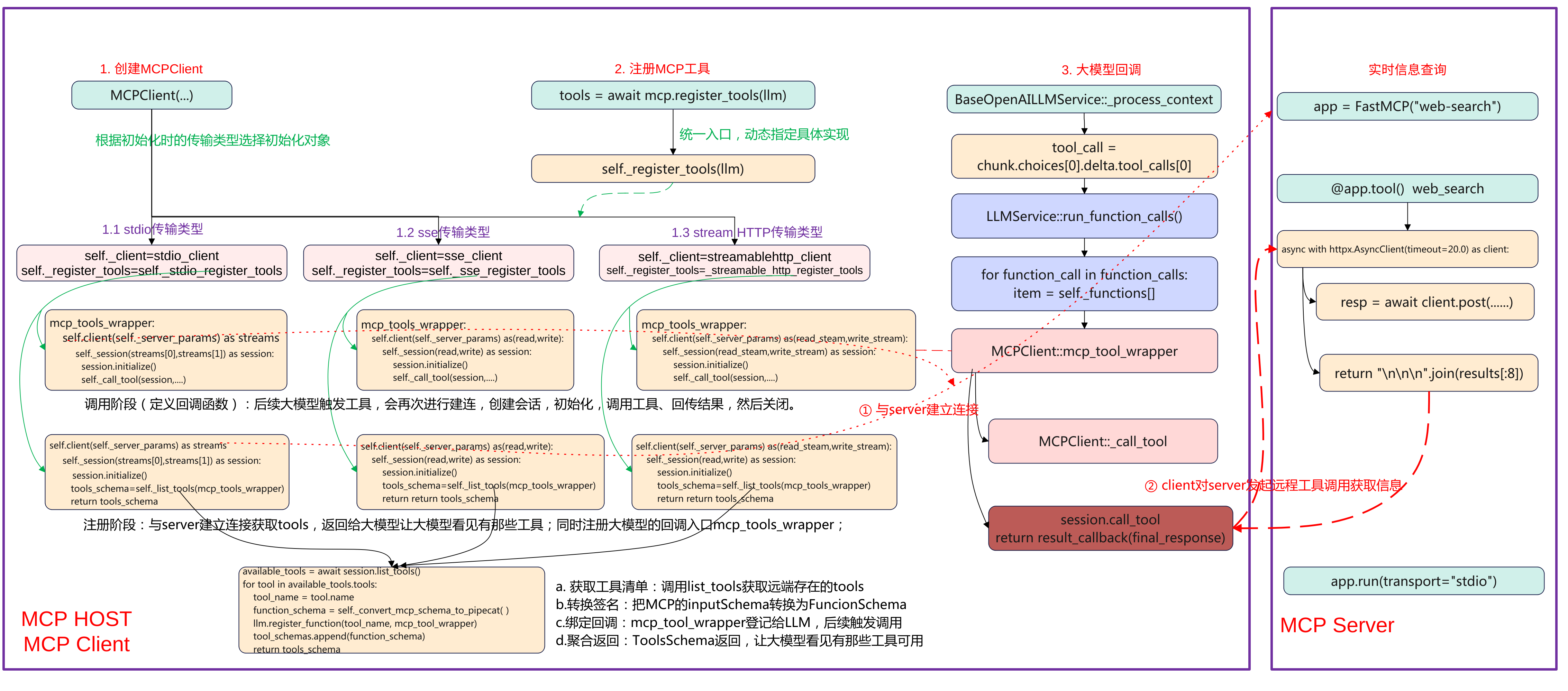
简介 本文主要基于Pipecat实现一个MCP stdio传输方式调用的示例。基于智谱Web-Search-Pro实现一个MCP Server,然后在Pipecat应用基础上实现MCP Client,实现可以实时查询天气等功能。通过这个示例来理解pipecat的mcp调用流程。 先上一张完整流程图,本文将重点围绕MCP Host、MCP Client端的创建MCP Client、注册MCP工具、以及大模型回调来展开说明pipecat上MCP的调用流程。 Pipecat MCP client端 下面pipecat应用MCP Host的关键代码: # STT: DashScope FunASR (realtime) stt = DashscopeFunASRSTTService(api_key=os.getenv("DASHSCOPE_API_KEY")) # TTS: DashScope CosyVoice v2 (streaming) tts = DashscopeCosyVoiceTTSService( api_key=os.getenv("DASHSCOPE_API_KEY"), voice="longxiaochun_v2", ) # LLM: Qwen (DashScope OpenAI compatible) llm = QwenLLMService( api_key=os.getenv("DASHSCOPE_API_KEY"), # Mainland China endpoint for OpenAI-compatible API: base_url="https://dashscope.aliyuncs.com/compatible-mode/v1", model="qwen-plus", ) server_script = os.path.join(os.path.dirname(__file__), "mcp", "web_search_mcp.py") mcp = MCPClient( server_params=StdioServerParameters( command=sys.executable, args=[server_script], env={"BIGMODEL_API_KEY": os.getenv("BIGMODEL_API_KEY", "")}, ) ) tools = await mcp.register_tools(llm) system = f""" 你是一个在 WebRTC 通话里的中文助手。 - 回答尽量简洁,必要时可调用 MCP 工具完成查询/检索/图片等任务。 - 输出会被转换为语音,避免使用过多特殊字符。 - 工具调用时少解释过程,直接给出关键结论。 """ messages = [{"role": "system", "content": system}] context = LLMContext(messages, tools) if tools else LLMContext(messages) context_aggregator = LLMContextAggregatorPair(context) pipeline = Pipeline( [ transport.input(), # Transport user input stt, context_aggregator.user(), # User spoken responses llm, # LLM tts, # TTS transport.output(), # Transport bot output context_aggregator.assistant(), # Assistant spoken responses and tool context ] ) task = PipelineTask( pipeline, params=PipelineParams( enable_metrics=True, enable_usage_metrics=True, ), idle_timeout_secs=runner_args.pipeline_idle_timeout_secs, ) (1)语音识别 stt = DashscopeFunASRSTTService(api_key=os.getenv("DASHSCOPE_API_KEY")) 使用了DashScope提供的FunASR实时语音识别服务,输入音频流来自WebRTC,输出为识别的文字,这这是整个pipeline的第一个处理单元。 (2)语音合成 tts = DashscopeCosyVoiceTTSService( api_key=os.getenv("DASHSCOPE_API_KEY"), voice="longxiaochun_v2", ) 使用DataScope的CosyVoice2模型,将LLM输出的文本转为语音,参数Voice为"龙小纯"音色,支持流式输出,边生成边播放。 (3)大语言模型 llm = QwenLLMService( api_key=os.getenv("DASHSCOPE_API_KEY"), base_url="https://dashscope.aliyuncs.com/compatible-mode/v1", model="qwen-plus", ) 使用DashSCcope的Qwen plus模型,其兼容OpenAI接口模式,通过统一的LLMService封装,可以插拔替换,接收来自STT的文字输入,并可调用MCP工具。 (4)MCP工具客户端 mcp = MCPClient( server_params=StdioServerParameters( command=sys.executable, args=[server_script], env={"BIGMODEL_API_KEY": os.getenv("BIGMODEL_API_KEY", "")}, ) ) tools = await mcp.register_tools(llm) MCPClient启动一个外部MCP工具进程web_search_mcp.py,MCP是一个工具协议层,让LLM可以调用外部函数。register_tools会把MCP提供的工具注册进LLM,使其可以向OpenAI Function Call一样调用。例如查询天气、搜索网页、生成图片等。 (5)系统提示词system prompt system = """ 你是一个在 WebRTC 通话里的中文助手。 - 回答尽量简洁,必要时可调用 MCP 工具完成查询/检索/图片等任务。 - 输出会被转换为语音,避免使用过多特殊字符。 - 工具调用时少解释过程,直接给出关键结论。 """ LLMContex保持当前对话上下文、系统提示与工具注册,LLMContextAggregatorPair维护用户与助手的历史消息流(多轮对话记忆),这让语音交互能记住上下文内容,而非每轮都从0开始。 (6)pipeline定义语言交互主流程 pipeline = Pipeline([ transport.input(), # 用户语音输入流 stt, # 语音转文字 context_aggregator.user(),# 更新用户对话上下文 llm, # 调用大模型 tts, # 文本转语音 transport.output(), # 输出音频到客户端 context_aggregator.assistant(), # 保存助手回答上下文 ]) 顺序 模块 输入 输出 1 transport.input() 麦克风语音 音频流 2 stt 音频流 用户文字 3 context_aggregator.user() 用户文字 更新上下文 4 llm 上下文 模型回答文本 5 tts 回答文本 音频流 6 transport.output() 音频流 扬声器播放 7 context_aggregator.assistant() 模型回答 保存为记忆 (7)pipeline任务封装 task = PipelineTask( pipeline, params=PipelineParams( enable_metrics=True, enable_usage_metrics=True, ), idle_timeout_secs=runner_args.pipeline_idle_timeout_secs, ) 封装为可执行任务,支持性能监控与使用统计,可设置空闲超时自动关闭。 MCP Server工具端 (1)导入依赖与初始化 import os, asyncio, sys import httpx from mcp.server import FastMCP app = FastMCP("web-search") FastMCP("web-search") 表示这是一个名为 "web-search" 的 MCP 工具服务,CP 协议使用 JSON-RPC over stdio。httpx是异步HTTP客户端,用于调用外部搜索接口,如果httpx缺失,本地按照pip install httpx。 @app.tool() async def web_search(query: str) -> str: """ 搜索互联网内容 Args: query: 要搜索的内容 Returns: 搜索结果的简要总结 """ _log(f"tool called: web_search(query={repr(query)[:120]})") api_key = os.getenv("BIGMODEL_API_KEY") if not api_key: _log("Missing BIGMODEL_API_KEY") return "Missing BIGMODEL_API_KEY" # Some endpoints accept raw key; others require Bearer. Try raw first to match user sample. headers = {"Authorization": api_key} payload = { "tool": "web-search-pro", "messages": [{"role": "user", "content": query}], "stream": False, } async with httpx.AsyncClient(timeout=20.0) as client: try: _log("sending request to BigModel web-search-pro") resp = await client.post( "https://open.bigmodel.cn/api/paas/v4/tools", headers=headers, json=payload ) _log(f"received response status={resp.status_code}") resp.raise_for_status() data = resp.json() except Exception as e: _log(f"request error: {e}") return f"Web search error: {e}" results = [] try: for choice in data.get("choices", []): message = choice.get("message", {}) for tool_call in message.get("tool_calls", []): for item in tool_call.get("search_result", []) or []: content = item.get("content") if content: results.append(content) except Exception: # Fallback to raw body _log("unexpected response structure; returning raw JSON snippet") return str(data)[:2000] if not results: _log("no results") return "No results." _log(f"returning {len(results)} result chunks") return "\n\n\n".join(results[:8]) 使用@app.tool定义工具的接口,其会注册一个工具到MCP Server,工具名称默认为函数名web_search。最终这个工具会暴露给MCP Client,LLM调用时就像function call一样。 函数中具体的实现是构造一个请求体并调用BigModel API。输入为query表示要查询的内容,最终返回查询到的JSON格式结果,将结果进行解析返回结构类似OpenAI格式。 MCP Client初始化 创建MCPClient类 if StdioServerParameters is None: raise ImportError( "StdioServerParameters not available in your MCP package. " "Upgrade MCP: `pip install -U mcp`." ) server_script = os.path.join(os.path.dirname(__file__), "mcp", "web_search_mcp.py") mcp = MCPClient( server_params=StdioServerParameters( command=sys.executable, args=[server_script], env={"BIGMODEL_API_KEY": os.getenv("BIGMODEL_API_KEY", "")}, ) ) 首先检查StdioServerParameters是否可用,不可用的haul则升级mcp包。接着计算server_script路径,指向FastMCP服务脚本(实现@app.tool)的web_search,构造MCPClient,传入stdio参数,参数如下: command=sys.executable 确保用当前虚拟环境的 Python 启动子进程(依赖一致)。 args=[server_script] 启动该脚本。 env={"BIGMODEL_API_KEY": ...} 把 BigModel 的 API Key 传给子进程(工具内部要用)。 server_script 指向真正提供工具的 MCP 服务器(定义了 @app.tool() 的 web_search)。 MCPClient构造 class MCPClient(BaseObject): def __init__( self, server_params: ServerParameters, **kwargs, ): """Initialize the MCP client with server parameters. Args: server_params: Server connection parameters (stdio or SSE). **kwargs: Additional arguments passed to the parent BaseObject. """ super().__init__(**kwargs) self._server_params = server_params self._session = ClientSession self._needs_alternate_schema = False if isinstance(server_params, StdioServerParameters): self._client = stdio_client self._register_tools = self._stdio_register_tools elif isinstance(server_params, SseServerParameters): self._client = sse_client self._register_tools = self._sse_register_tools elif isinstance(server_params, StreamableHttpParameters): self._client = streamablehttp_client self._register_tools = self._streamable_http_register_tools else: raise TypeError( f"{self} invalid argument type: `server_params` must be either StdioServerParameters, SseServerParameters, or StreamableHttpParameters." ) 构造时“按参数类型选策略”。把同一套“注册逻辑”与不同“传输后端”(stdio/SSE/HTTP)解耦,延后到运行时绑定。具体的关键步骤如下: 保存参数与会话类:self._server_params = server_params:记录连接配置(命令/URL/headers/env 等)。self._session = ClientSession:后续用读写流构建 MCP 会话(initialize/list_tools/call_tool)。self._needs_alternate_schema = False:是否需要“严格 schema 清洗”留给后续判定。 选择传输实现与注册函数:根据传参来选择实际的client和注册函数,选择的类型为MCP的传输类型stdio类型、sse类型、streamhttp类型。 self._client 是“连接工厂”(异步上下文管理器),进入后产出读/写流(stdio 为子进程 stdin/stdout,SSE/HTTP 为对应流)。self._register_tools 是对应后端的“注册流程实现”,register_tools(llm) 会调用它去建连→初始化→列工具→注册“工具名→回调”。 这个设计要点是典型的Strategy + Factory:构造时完成“策略绑定”,后续使用统一入口(register_tools)。 MCP工具注册 mcp = MCPClient( server_params=StdioServerParameters( command=sys.executable, args=[server_script], env={"BIGMODEL_API_KEY": os.getenv("BIGMODEL_API_KEY", "")}, ) ) tools = await mcp.register_tools(llm) 创建完MCPClient对象后,就进行注册tools,调用到MCPClient::register_tools函数。 async def register_tools(self, llm) -> ToolsSchema: """Register all available MCP tools with an LLM service. Connects to the MCP server, discovers available tools, converts their schemas to Pipecat format, and registers them with the LLM service. Args: llm: The Pipecat LLM service to register tools with. Returns: A ToolsSchema containing all successfully registered tools. """ # Check once if the LLM needs alternate strict schema self._needs_alternate_schema = llm and llm.needs_mcp_alternate_schema() tools_schema = await self._register_tools(llm) return tools_schema 统一入口,完成连接MCP——>获取工具列表——>转换schema——>注册到LLM并返回ToolsSchema的过程。 self._needs_alternate_schema:询问当前 LLM 是否需要“严格 schema”兼容(有些 LLM 对 JSON Schema 更严格)。若为 True,后续在 schema 转换时会移除/调整如 additionalProperties 等字段。 tools_schema = await self._register_tools(llm):这里的 _register_tools 是构造函数里根据 server_params 绑定的具体实现(stdio/SSE/HTTP 之一)。内部会实际建连、session.initialize()、session.list_tools()、把每个工具注册为 “工具名 → 回调(mcp_tool_wrapper)”,并组装 ToolsSchema。 ToolsSchema(standard_tools=[FunctionSchema...]),供上层塞进 LLMContext(messages, tools),让大模型“看见”可用工具,同时建立调用时的回调映射。 xxx_register_tools 根据参数传入的类型stdio、sse、streamable_http选择注册的工具,分别会调用如下: stdio类型:调用_stdio_register_tools sse类型:调用_sse_register_tools streamable类型:调用_streamable_http_register_tools 这里以stdio类型为例分析, async def _stdio_register_tools(self, llm) -> ToolsSchema: """Register all available mcp tools with the LLM service. Args: llm: The Pipecat LLM service to register tools with Returns: A ToolsSchema containing all registered tools """ async def mcp_tool_wrapper(params: FunctionCallParams) -> None: """Wrapper for mcp tool calls to match Pipecat's function call interface.""" logger.debug( f"Executing tool '{params.function_name}' with call ID: {params.tool_call_id}" ) logger.trace(f"Tool arguments: {json.dumps(params.arguments, indent=2)}") try: async with self._client(self._server_params) as streams: async with self._session(streams[0], streams[1]) as session: await session.initialize() await self._call_tool( session, params.function_name, params.arguments, params.result_callback ) except Exception as e: error_msg = f"Error calling mcp tool {params.function_name}: {str(e)}" logger.error(error_msg) logger.exception("Full exception details:") await params.result_callback(error_msg) logger.debug("Starting registration of mcp tools") async with self._client(self._server_params) as streams: async with self._session(streams[0], streams[1]) as session: await session.initialize() tools_schema = await self._list_tools(session, mcp_tool_wrapper, llm) return tools_schema (1)定义回调mcp_tool_wrapper(未来执行) 定义回调 mcp_tool_wrapper(未来每次工具调用时执行),这个是要注册进llm大模型的,用于后续大模型触发的回调。具体的步骤如下: 记录日志 → 建立到 MCP 的 stdio 连接:self._client(self._server_params)。 取到读写流 streams[0]/streams[1] → 构建 ClientSession → initialize()。 调用 _call_tool(session, name, args, result_callback) 执行工具;异常则通过 result_callback 把错误文本回传。 (2)注册阶段(当前执行) 再开一次短连接并 initialize() 调用 _list_tools(session, mcp_tool_wrapper, llm),获取远端工具清单,转为 FunctionSchema 并用 llm.register_function(tool_name, mcp_tool_wrapper) 将“工具名→回调”登记到 LLM;聚合为 ToolsSchema 返回。 _list_tools async def _list_tools(self, session, mcp_tool_wrapper, llm): available_tools = await session.list_tools() tool_schemas: List[FunctionSchema] = [] try: logger.debug(f"Found {len(available_tools)} available tools") except: pass for tool in available_tools.tools: tool_name = tool.name logger.debug(f"Processing tool: {tool_name}") logger.debug(f"Tool description: {tool.description}") try: # Convert the schema function_schema = self._convert_mcp_schema_to_pipecat( tool_name, {"description": tool.description, "input_schema": tool.inputSchema}, ) # Register the wrapped function logger.debug(f"Registering function handler for '{tool_name}'") llm.register_function(tool_name, mcp_tool_wrapper) # Add to list of schemas tool_schemas.append(function_schema) logger.debug(f"Successfully registered tool '{tool_name}'") except Exception as e: logger.error(f"Failed to register tool '{tool_name}': {str(e)}") logger.exception("Full exception details:") continue logger.debug(f"Completed registration of {len(tool_schemas)} tools") tools_schema = ToolsSchema(standard_tools=tool_schemas) return tools_schema _list_tools是用当前MCP会话把远端工具同步到LLM,具体的步骤如下: list_tools() 获取远端工具清单。 遍历每个工具,inputSchema 转为 Pipecat 的 FunctionSchema(name/description/properties/required)。 调用 llm.register_function(tool_name, mcp_tool_wrapper) 把“工具名→回调”登记到 LLM(回调负责后续真实调用)。 把 FunctionSchema 累加到列表。 组装 ToolsSchema(standard_tools=...) 返回。 其目的是让大模型“看见”有哪些工具(用于决策),建立从“工具名”到“实际执行逻辑(mcp_tool_wrapper)”的映射,确保 tool_call 能打到 MCP。 大模型工具调用 触发tool_call @traced_llm async def _process_context(self, context: OpenAILLMContext | LLMContext): if chunk.choices[0].delta.tool_calls: tool_call = chunk.choices[0].delta.tool_calls[0] ... if tool_call.function and tool_call.function.name: function_name += tool_call.function.name tool_call_id = tool_call.id if tool_call.function and tool_call.function.arguments: arguments += tool_call.function.arguments 在_process_context中解析,大模型产生tool_call,接着组装函数调用并交给执行器。 function_calls.append( FunctionCallFromLLM(context=context, tool_call_id=tool_id, function_name=function_name, arguments=json.loads(arguments)) ) await self.run_function_calls(function_calls) 查表命中回调 async def run_function_calls(self, function_calls: Sequence[FunctionCallFromLLM]): if function_call.function_name in self._functions.keys(): item = self._functions[function_call.function_name] elif None in self._functions.keys(): item = self._functions[None] 在类LLMService中,LLM层查表命中"工具名-回调"。接着下发"调用进行时"帧并准备结果回调。 progress_frame = FunctionCallInProgressFrame(...) await self.push_frame(progress_frame, FrameDirection.DOWNSTREAM) await self.push_frame(progress_frame, FrameDirection.UPSTREAM) ..... async def function_call_result_callback(result: Any, *, properties: ...): result_frame = FunctionCallResultFrame(..., result=result, ...) await self.push_frame(result_frame, FrameDirection.DOWNSTREAM) await self.push_frame(result_frame, FrameDirection.UPSTREAM) MCP调用 以stdio为例最后触发已注册的回调。 async def _stdio_register_tools(self, llm) -> ToolsSchema: async with self._client(self._server_params) as streams: async with self._session(streams[0], streams[1]) as session: await session.initialize() await self._call_tool(session, params.function_name, params.arguments, params.result_callback) 真正调用MCP工具并聚合结果。 results = await session.call_tool(function_name, arguments=arguments) response = "" if results and hasattr(results, "content"): for i, content in enumerate(results.content): if hasattr(content, "text") and content.text: response += content.text await result_callback(response if response else "Sorry, could not call the mcp tool") -
MCP 协议:AI 应用连接外部系统的标准化接口
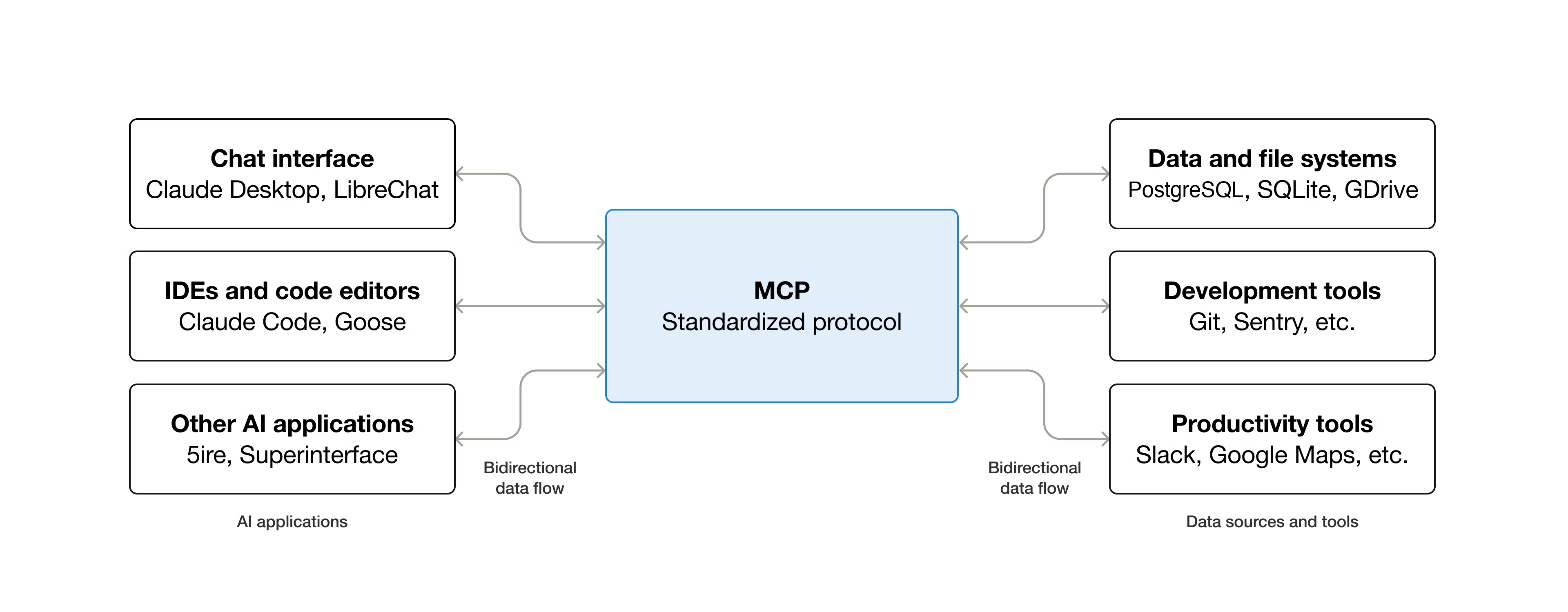
简介 什么是MCP MCP是Model Context Protocol模型上下文的一个开源标准,用于连接人工智能应用程序到外部系统。使用MCP,让Claude、ChatGPT这样的AI application可以连接到数据源(例如本地文件、数据库)、工具(例如搜索引擎、计算器)和工作流(例如专业提示),从而能够访问关键信息并执行任务。 可以把MCP类比是AI application的USB-C接口,USB-C为电子设备提供了一种标准化的连接方式,MCP也为Ai application连接到外部系统提供了一种标准化的方式。 具体MCP能够实现什么了? Agents可以访问Google日历和Notion,充当更个性化的AI助手。 Claude code可以使用Figma设计生成整个网络应用程序。 企业聊天机器人可以连接到组织内部的多个数据库,使用户能够通过聊天分析数据。 AI模型可以在Blendoer中创建3D设计,并使用3D打印机将其打印出来。 MCP为什么重要? 根据生态系统的位置不同,MCP可以带来一些列的好处。 开发者:MCP在构建或集成AI应用程序或代理是,可以减少开发时间和复杂性。 AI应用或智能体:MCP提供对数据源、工具和应用程序系统的访问,这将增强能力并改善最终用户体验。 最终用户:MCP导致更强大的AI应用或智能体,它们可以访问您的数据并在必要时代表您采取行动。 MCP架构 模型上下文包括以下项目: MCP 规范:概述客户端和服务器实现要求的MCP规范。 MCP SDKs:实现MCP不同的编程语言SDK。 MCP开发工具:用于开发MCP服务器和客户端的工具。 MCP参考服务器实现:MCP服务端的参考代码。 MCP的概念 Participants参与者 MCP遵循客户端-服务端架构,其中MCP Host(如Claude Code或Claude Desktop等AI应用)建立与一个或多个MCP服务器的链接。MCP Host通过为每个MCP server创建一个MCP Client来实现这一点。每个MCP Client与其对一个的MCP Server保持一对一的专用连接。 在MCP架构中,关键参与者可以分为如下: MCP Host:协调和管理一个或多个MCP Client的AI应用。 MCP Client:一个维护与MCP Server连接的组件,并从MCP 服务器获取上下文供MCP主机使用。 MCP Server:一个想MCP 客户端提供上下文的程序。 下面来举个例子,Visual studio Code作为MCP Host。当Visual Studio Code与MCP Server建立连接时,Visual Studio Code运行时会实例化一个MCP Client对象,该对象维护与Sentry MCP服务的连接。当Visual Studio Code随后连接到另一个MCP Server时,Visual Studio Code运行时会实例化另一个MCP Client对象以维护此连接,从而保持MCP客户端与MCP服务器的一对一关系。 需要注意的是,MCP server指的是提供上下文数据的程序,无论他运行在哪里。MCP服务器可以子啊本地或远程运行。例如,当Claude桌面启动文件系统服务器时,服务器在同一个机器上本地运行,因为他使用STDIO传输。这通常被成为本地MCP server,而官方Sentry MCP服务器在Sentry平台运行,并使用Streamable HTTP传输,这通常被称为远程MCP服务器。 MCP的层次 MCP有两层组成: data layer:定义JSION-RPC的客户端-服务端通信协议,包括生命周期管理,以及核心原语,如工具、资源、提示和通知。 transport layer:定义使客户端和服务器之间能够进行数据交换的通信机制和通道,包括特定于传输的连接建立、信息帧和授权。 从概念上将,数据层是内层,而传输层是外层。 Data layer 数据层实现了一个基于JSON-RPC 2.0的交互协议,该协议定义了消息结构和语义。该层包括。 Lifecycle management:处理客户端和服务器之间的连接初始化、能力协商和连接终止。 Server features:使服务器能够提供核心功能,包括用于AI操作的工具、用于上下文数据的资源以及从客户端接收和发送交互。 Client features:使服务器能够请求客户端从主机LLM采样、从用户获取输入以及向客户端记录消息。 Utility features:支持实时更新通知和长时间运行操作的进度跟踪等附加功能。 Transport layer 传输层管理客户端和服务器之间的通信通道和身份验证,它处理连接建立、消息帧处理以及MCP参与之间的安全通信。 MCP 支持两种传输机制: stdio transport:使用标准输入/输出流,在本地同一台机器上的进程之间进行直接进程通信,提供最佳性能且无网络开销。 Streamable HTTP transport: 使用HTTP POST传输客户端到服务器的消息,并可选的使用服务器发送事件(Server-Sent Events)实现流式传输功能。这种传输方式支持远程服务器通信,并支持标准HTTP认证方法,包括令牌、API密钥和自定义头信息。 传输层将通信细节抽象化,与协议层分离,使得 JSON-RPC 2.0 消息格式在所有传输机制中保持一致。 Data Layer Protocol MCP的核心部分之一是定义MCP client与MCP server之间的模式和语义。开发者可以会发现数据层特别是基本数据类型集合,这是MCP中最有趣的部分。他是定义开发者如何从MCP服务器共享上下文到MCP客户端的部分。 MCP 使用JSION-RPC 2.0作为其底层的RPC协议,客户端和服务器相互发送请求并做出相应的会议,当无需响应时,可以使用通知。 MCP定义了服务器可以公开的3个核心基本概念: Tools:AI应用程序可以调用执行操作的可执行函数(例如,文件操作、API调用、数据库查询) Rresources:为AI应用程序提供上下文信息的数据源(例如,文件内容、数据库记录、API响应) Prompts:可重复使用的模版,有助于构建与语言模型交互(例如系统提示、少量样本示例) 每种原始类型都有与之关联的发现方法(/list)、检索方法(/get),在某些情况下还有执行方法(tools/call)。在MCP客户端将使用*/list方法发现可用的原始类型。例如,客户端可以先列出所有可用的工具(tools/list),然后执行他们。 MCP还定义了客户端可以公开的原语,这些原语允许MCP服务器构建更丰富的交互。 Sampling:采样,允许server从client的ai应用程序请求语音模型补全,当server希望访问语言模型,但希望保持模型独立且不在其MCP server中包含语音模型SDK时,这很有用。他们可以使用sampling/comlete方法从客户端的AI应用程序请求语音模型补全。 Elicitation:提取,允许server从用户哪里请求额外信息,当server希望从用户获取更多信息,或请求确认某个操作时,这很有用,使用elicitation/request方法从用户哪里请求额外信息。 logging:日志记录,允许server向client发送日志信息,用于调试和监控目的。 Notifications该协议支持实时通知,以实现server与client之间的动态更新,例如,当server可用工具发生变化是,比如新功能可用或现有工具被修改,服务器可以向连接的客户端发送工具更新通知,告知这些变化,通知以JSON-RPC 2.0通知消息的形式发送,并使用MCP server能够向连接的client提供实时更新。 协议交互Example 初始化(生命周期管理) MCP通过能力协商握手开始生命周期管理,如生命周期管理部分所述,客户端发送initialize请求以建立连接并协商支持的功能。 initialize request { "jsonrpc": "2.0", "id": 1, "method": "initialize", "params": { "protocolVersion": "2025-06-18", "capabilities": { "elicitation": {} }, "clientInfo": { "name": "example-client", "version": "1.0.0" } } } initialize response { "jsonrpc": "2.0", "id": 1, "result": { "protocolVersion": "2025-06-18", "capabilities": { "tools": { "listChanged": true }, "resources": {} }, "serverInfo": { "name": "example-server", "version": "1.0.0" } } } 这段是典型的JSON-RPC协议交互过程,用于客户端和服务端建立连接时的初始化握手。客户端发送initialize方法,服务端results回复确定版本和返回支持的功能。初始化过程是MCP生命周期管理的关键部分,其服务有几个目的: 协议版本协商:protocolVersion字段确保客户端和服务端使用兼容的协议版本,可以防止不同版本尝试交互是可能发生通信错误,如果未能协商出相互兼容的版本,则应该终止连接。 能力发现:capabilities对象允许每一方声明他们支持的功能,包括他们可以处理的基元(工具、资源、提示)以及是否支持通知等特性。通过避免不支持的操作来实现高效通信。 身份交换:clientInfo和serverInfo对象提供用于调试和兼容性目的的识别和版本信息。 上面的示例中能力协商展示了如何声明MCP原语: 客户端的功能 "elicitation": {} - 客户端声明可以处理用户交互请求(可以接收 elicitation/create 方法调用) 服务端的功能: "tools": {"listChanged": true} - 服务器支持工具原语,并且在其工具列表发生变化时可以发送 tools/list_changed 通知 "resources": {} - 服务器也支持资源原语(可以处理 resources/list 和 resources/read 方法) 最后初始化成功后,客户端再发送同志表示已准备就绪 { "jsonrpc": "2.0", "method": "notifications/initialized" } 在初始化过程中,AI application的MCP client管理器连接到server后,并将它们的能力存储起来以供后续使用。应用程序使用这些信息来确定那些server可以提供特定类型的功能(tools、resource、prompts),以及它们是否支持实时更新。下面是AI application初始化伪代码。 # Pseudo Code async with stdio_client(server_config) as (read, write): async with ClientSession(read, write) as session: init_response = await session.initialize() if init_response.capabilities.tools: app.register_mcp_server(session, supports_tools=True) app.set_server_ready(session) 工具发现 连接建立成功后,client可以通过发送tools/list请求发现可用的工具。这个请求是MCP工具发现机制的基础,他允许client在尝试使用工具之前了解server有那些可用的工具。 工具列表请求: { "jsonrpc": "2.0", "id": 2, "method": "tools/list" } 工具列表请求很简单,tools/list的方法,不包含任何参数。 工具列表回复 { "jsonrpc": "2.0", "id": 2, "result": { "tools": [ { "name": "calculator_arithmetic", "title": "Calculator", "description": "Perform mathematical calculations including basic arithmetic, trigonometric functions, and algebraic operations", "inputSchema": { "type": "object", "properties": { "expression": { "type": "string", "description": "Mathematical expression to evaluate (e.g., '2 + 3 * 4', 'sin(30)', 'sqrt(16)')" } }, "required": ["expression"] } }, { "name": "weather_current", "title": "Weather Information", "description": "Get current weather information for any location worldwide", "inputSchema": { "type": "object", "properties": { "location": { "type": "string", "description": "City name, address, or coordinates (latitude,longitude)" }, "units": { "type": "string", "enum": ["metric", "imperial", "kelvin"], "description": "Temperature units to use in response", "default": "metric" } }, "required": ["location"] } } ] } } 响应包含一个tools数组,该数组提供了关于每个可用的工具全面元数据。这种基于数组的结构允许服务端同时暴露多个工具,同时保持不同功能之间的清晰界限。 响应中给每个工具对象包含几个关键字段: name: 服务器命名空间内工具的唯一标识符。这作为工具执行的主键,应遵循清晰的命名模式(例如, calculator_arithmetic 而不是仅仅 calculate )。 title : 客户端可以向用户展示的工具的可读显示名称。 description : 该工具的作用是什么以及何时使用它的详细说明。 inputSchema : 一个 JSON Schema,定义了预期的输入参数,支持类型验证并提供关于必需和可选参数的清晰文档。 inputSchema是描述tool需要的输入参数的规范,告诉LLM参数叫什么、类型是什么,有那些枚举、那些字段是必填,是否有默认值。结构如下: inputSchema └── type: object ← 输入是一个对象 └── properties ← 参数的列表(有那些参数) ├── expression ← 参数1,不要被expression迷惑只是一个参数的命名。 └── location ← 参数2 └── units ← 参数3 └── required ← 哪些字段必须提供 AI application从所有连接的MCP server获取可用的tools,并将它们组合成一个语言模型可以访问的统一工具注册表。这使得LLM能够了解他可以执行那些操作,并在对话期间自动生成相应的工具调用。下面是python tools发现的伪代码。 # Pseudo-code using MCP Python SDK patterns available_tools = [] for session in app.mcp_server_sessions(): tools_response = await session.list_tools() available_tools.extend(tools_response.tools) conversation.register_available_tools(available_tools) 工具执行 客户端现在可以使用tools/call的方法执行一个tool,这展示了MCP 原语在实际中的使用方式:在发现可用工具后,客户端可以用适当的参数调用它们。 理解工具执行的请求 tools/call请求遵循结构化格式,确保客户端和服务端之间的类型安全和清晰通信,请注意,我们使用的是发现响应中的正确工具名称,而不是简化名称。 工具调用请求: { "jsonrpc": "2.0", "id": 3, "method": "tools/call", "params": { "name": "weather_current", "arguments": { "location": "San Francisco", "units": "imperial" } } } 请求结构包含几个重要的组件: name:必须与发现响应中的工具名称( weather_current )完全匹配。这确保服务器能够正确识别要执行哪个工具。 arguments : 包含工具的 inputSchema 定义的输入参数。 JSON-RPC 结构:使用标准的 JSON-RPC 2.0 格式,并使用独特的 id 进行请求-响应关联。 工具调用响应: { "jsonrpc": "2.0", "id": 3, "result": { "content": [ { "type": "text", "text": "Current weather in San Francisco: 68°F, partly cloudy with light winds from the west at 8 mph. Humidity: 65%" } ] } } content 数组:工具响应返回一个内容对象数组,允许进行丰富、多格式的响应(文本、图像、资源等)。 Content Types:每个内容对象都有一个 type 字段。在这个例子中, "type": "text" 表示纯文本内容,但 MCP 支持多种内容类型以适应不同的使用场景。 Structured Output:结构化输出,该响应提供可操作的资讯,供 AI 应用作为语言模型交互的上下文使用。 当语言模型在对话中决定使用工具时,AI application会拦截工具调用,将其路由到适当的MCP服务器执行该调用,并将结果作为对话流程的一部分返回给LLM。这使LLM能够访问实时数据并在外部世界执行操作。下面是工具调用的是示例操作: # Pseudo-code for AI application tool execution async def handle_tool_call(conversation, tool_name, arguments): session = app.find_mcp_session_for_tool(tool_name) result = await session.call_tool(tool_name, arguments) conversation.add_tool_result(result.content) 实时更新 MCP支持实时通知,使server能够在未被明确请求的情况下通知客户端有关变更,这展示了通知系统,这是一个关键特性,它使MCP连接保持同步和响应。 当服务器的可用tool发生变化时,例如新功能可用、现有工具被修改或工具暂时不可用,服务端可以主动通知连接的客户端。 { "jsonrpc": "2.0", "method": "notifications/tools/list_changed" } notifications有关键的特性 No Response Required: 请注意通知中没有 id 字段。这遵循 JSON-RPC 2.0 通知的语义,即不期望或发送响应。 Capability-Based:此通知仅由在初始化期间(如步骤 1 所示)在其工具能力中声明了 "listChanged": true 的服务器发送。 Event-Driven:服务器根据内部状态变化决定何时发送通知,使 MCP 连接动态且响应迅速。 客户端收到notification后,客户端通常会通过请求更新的工具列表做出反应,这会形成一个刷新周期,使客户端对可用工具的理解保持最新: { "jsonrpc": "2.0", "id": 4, "method": "tools/list" } 当ai application收到关于tools变更的通知时,它会理解刷新其工具注册表并更新LLM的可用功能。这确保了正在进行的对话始终能够访问最新的一套工具,并LLM可以随着新功能的可用而动态适应。 # Pseudo-code for AI application notification handling async def handle_tools_changed_notification(session): tools_response = await session.list_tools() app.update_available_tools(session, tools_response.tools) if app.conversation.is_active(): app.conversation.notify_llm_of_new_capabilities() MCP Server MCP Server是通过标准协议接口向AI applicant提供功能的应用程序,常见例子包括文档访问的文件系统服务器、用于数据查询的数据库服务器、用于代码管理的Github服务器、用于团队沟通的slack服务器以及用于日程安排的日历服务器。 服务器通过3个构建模块提供功能: tools:LLM可以主动调用的功能,并根据用户请求决定何时使用它们。工具可以写入数据库、调用外部API、修改文件或触发其他逻辑。比如搜索航班、发送消息、创建日历事件。由模型来控制。 resources:提供只读访问权限以获取上下文信息的被动数据源,例如文件内容、数据库模式或API文档。比如检索文档、访问知识库、读取日历等。由application来控制。 prompts:预构建的指令模版,告诉模型如何使用特定的工具和资源。比如计划假期、总结我的会议、起草一封电子邮件等。由用户来控制。 下面假设一个场景来展示每个工具的作用,并介绍如何协同工作。 tools 工具使AI模型能够执行操作,每个tool定义了具有类型输入和输出的特定操作,模型根据上下文请求工具执行。 (1)tools如何工作的 具体的工作原理是LLMs可以调用的模式定义接口,MCP使用JSON Schema进行验证。每个工具执行一个具有明确定义的输入和输出的单一操作。tools在执行前可能需要用户同意,这有助于确保用户对模型采取的操作保持控制。 协议的操作: tools/list: 目的是发现可用工具,返回的是包含模式定义的工具数组。 tools/call:目的是执行特定的工具,返回的是工具执行的结果。 下面是示例工具的定义: { name: "searchFlights", description: "Search for available flights", inputSchema: { type: "object", properties: { origin: { type: "string", description: "Departure city" }, destination: { type: "string", description: "Arrival city" }, date: { type: "string", format: "date", description: "Travel date" } }, required: ["origin", "destination", "date"] } } (2)示例:旅行预定 tools使ai applicantion能够udaibiao用户执行操作,在旅行规划场景中,AI应用程序可能会使用多个工具来帮助预定假期。 航班的搜索:查询多个航班公司并返回结构化的航班选型。 searchFlights(origin: "NYC", destination: "Barcelona", date: "2024-06-15") 日历的阻止:在用户的日历中标记旅行日期。 createCalendarEvent(title: "Barcelona Trip", startDate: "2024-06-15", endDate: "2024-06-22") 邮件的通知:向同事发送自动的离境邮件。 sendEmail(to: "team@work.com", subject: "Out of Office", body: "...") (3)用户交互模型 工具由模型控制,这意味着AI模型可以自动的发型和调用它们。然而,MCP通过多种机制强调人工监督。 为了信任和安全,应用程序可以通过各种机制实现用户控制,例如: 在 UI 中显示可用工具,使用户能够定义工具是否应在特定交互中可用 单个工具执行的审批对话框 预先批准某些安全操作的权限设置 显示所有工具执行及其结果的活动日志 resources 资源为AI应用程序提供结构化访问信息,这些信息可以被应用程序检索并提供给模型作为上下文。 (1)resources如何工作的 资源从文件、API、数据库或其他AI需要理解上下文的任何来源中暴露数据。应用程序可以直接访问这些信息并决定如何使用它,无论是选择相关的部分、使用嵌入进行搜索,还是将所有信息传递给模型。 每个资源都有一个唯一的URI(例如, file:///path/to/document.md),并声明其MIME类型以进行适当的内容处理。 resources支持两种发现模式: Direct Resources: 指向特定数据的固定 URI。示例: calendar://events/2024 - 返回 2024 年的日历可用性。 Resource Templates:带参数的动态 URI,用于灵活查询。 资源模板包含标题、描述和预期 MIME 类型等元数据,使其可发现且自描述。下面是协议操作: resources/list:目的是列出可用的直接资源,返回的是资源描述符数组。 resources/templates/list:目的是发现资源的模版,返回的是资源模版定义数组。 resources/read:目的是获取资源内容,返回的是带元数据的资源数据。 resources/subscribe:目的是监控资源变化,返回的是订阅确认。 (2)示例:获取旅行规划上下文 继续以旅行规划为例,resources为AI application提供访问相关信息的方式: Calendar data:calendar://events/2024,日历数据,检查用户可用性。 Travel documents :file:///Documents/Travel/passport.pdf,访问重要文件。 Previous itineraries:trips://history/barcelona-2023,参考过去的旅行和偏好。 AI应用检索这些资源,并决定如何处理它们,无论是使用嵌入或关键词搜索选择数据子集,还是将原始数据直接传递给模型。在这种情况下,它向模型提供日历数据、天气信息和旅行偏好,使模型能够检查可用性、查询天气模式并参考过去的旅行偏好。 下面是resource模版示例: { "uriTemplate": "weather://forecast/{city}/{date}", "name": "weather-forecast", "title": "Weather Forecast", "description": "Get weather forecast for any city and date", "mimeType": "application/json" } { "uriTemplate": "travel://flights/{origin}/{destination}", "name": "flight-search", "title": "Flight Search", "description": "Search available flights between cities", "mimeType": "application/json" } 这些模版支持灵活的查询,对于天气数据,用户可以访问任何城市/日期组合的预报。对于航班,它们可以搜索任意两个机场之间的航线。当用户输入NYC作为origin机场,并开始输入Bar作为destination机场时,系统可以建议BCN或BGI。 (3)用户交互模型 resources有营养程序驱动,使其在获取、处理和呈现可用上下文方面具有灵活性,常见的交互模式包括: 用于在熟悉的类似文件夹的结构中浏览资源的树形或列表视图。 用于查找特定资源的搜索和筛选界面 基于启发式或 AI 选择的自动上下文包含或智能建议 用于包含单个或多个资源的手动或批量选择界面 Prompts 提示提供可重用的模版,它们允许MCP服务器为特定领域提供参数化提示,或展示如何最佳使用MCP服务器。 (1)Prompts如何工作的 提示是定义预期输入和交互模式的结构化模版。它们由用户控制,需要显示调用而非自动触发。提示可以感知上下文,引用可用的资源和工具来创建全面的流程。下面是协议的操作: prompts/list:目的是发现可用提示,返回的是提示描述符数组。 prompts/get:目的是检索提示详情,返回的是带参数的完整提示定义。 (2)示例 提示为场景任务提供结构化的模版。 { "name": "plan-vacation", "title": "Plan a vacation", "description": "Guide through vacation planning process", "arguments": [ { "name": "destination", "type": "string", "required": true }, { "name": "duration", "type": "number", "description": "days" }, { "name": "budget", "type": "number", "required": false }, { "name": "interests", "type": "array", "items": { "type": "string" } } ] } MCP Client MCP client由主机应用程序实例化,用于与特定的MCP server进行通信。主机应用程序,如claude.ai或集成开发环境IDE,管理整体用户体验并协调多个客户端。每个客户端负责与一个server进行直接通信。host是用户交互的应用程序,而client是使能server连接的协议级组件。 除了利用server提供上下文外,client还可以向server提供多种功能。这些client功能使server开发能够构建更丰富的交互。 sampling:采样允许server通过client请求LLM补全,从实现代理式工作流程。这种方法将用户权限和安全措施完全至于客户端的控制之下。比如一个用于预定旅行的服务器可以向LLM发送航班列表,并请求LLM为用户挑选最佳航班。 Roots:Roots允许客户端指定服务器应关注的目录,通过协调机制传达预期的范围。比如一个用于预定旅行的服务器可能会被授予特定目录的权限,从中可以读取用户的日历。 Elicitaion:交互式信息提取使服务器能够在交互过程中请求的特定信息,为服务器按需收集信息提供了一种结构化的方式。比如预定旅行的服务器可能会询问用户对飞机座位、房间类型或联系方式的偏好。 Elicitaion 交互式信息提取使server能够在交互过程中请求特定信息,创建更动态和响应迅速的工作流程。 (1)概述 Elicitaion提供了一种结构化的方式,让server按需收集必要信息。server不再需要一开始就获取所有信息或在数据缺失时失败,而是可以暂停操作,向用户请求特定的输入。者创造了更灵活的交互方式,server能够根据用户需求进行调整,而不是遵循僵化的模式。下面提取的流程: 该流程支持动态信息收集,server在需要时可以请求特定的数据,用户通过合适的界面提供信息,server则继续使用新获取的上下文进行后续处理。 (2)示例 提取组件的示例如下: { method: "elicitation/requestInput", params: { message: "Please confirm your Barcelona vacation booking details:", schema: { type: "object", properties: { confirmBooking: { type: "boolean", description: "Confirm the booking (Flights + Hotel = $3,000)" }, seatPreference: { type: "string", enum: ["window", "aisle", "no preference"], description: "Preferred seat type for flights" }, roomType: { type: "string", enum: ["sea view", "city view", "garden view"], description: "Preferred room type at hotel" }, travelInsurance: { type: "boolean", default: false, description: "Add travel insurance ($150)" } }, required: ["confirmBooking"] } } } Roots roots定义服务器操作的文件系统边界,允许客户端指定服务器应关注的目录。 roots是client向server传到文件系统访问边界的机制,它们由指示服务器可以操作的目录文件URI组成,帮助server理解可用文件和文件夹的范围。虽然roots传到了预期的边界,但他们并不强制执行安全显示。实际的安全必须在操作系统级别通过文件权限或沙盒机制来强制执行。 下面是roots结构 { "uri": "file:///Users/agent/travel-planning", "name": "Travel Planning Workspace" } roots是专有的文件系统路径,始终使用file:// 的URL方案,它们帮助server理解项目边界、工作空间组织和可访问的目录。根列表可以根据用户在不同项目或文件夹中工作动态更新,当边界发生变化时,服务器通过roots/list_changed接收通知。 sampling 采样允许server通过client请求语言模型补全,在保持安全性和用户控制的同时,实现代理行为。 采样使server能够在不直接继承或支付AI模型费用的情况下执行依赖AI的任务。相反,服务器可以请求已经具有AI模型访问权限的客户代表它们处理这些任务。这种方法将用户权限和安全措施完全置于客户控制之下。由于采样请求发生在其他操作的上下文中,并且作为单独的模型调用进行处理,它们在不同上下文之间保持清晰的界限,从而能够更有效地使用上下文窗口。 该流程通过多个人工审核环境确保安全性。用户可以在响应返回server之前,审查并修改初始请求和生成的响应。 { messages: [ { role: "user", content: "Analyze these flight options and recommend the best choice:\n" + "[47 flights with prices, times, airlines, and layovers]\n" + "User preferences: morning departure, max 1 layover" } ], modelPreferences: { hints: [{ name: "claude-sonnet-4-20250514" // Suggested model }], costPriority: 0.3, // Less concerned about API cost speedPriority: 0.2, // Can wait for thorough analysis intelligencePriority: 0.9 // Need complex trade-off evaluation }, systemPrompt: "You are a travel expert helping users find the best flights based on their preferences", maxTokens: 1500 } 本文主要来自官方文档的翻译:https://modelcontextprotocol.io/docs/getting-started/intro -
ubuntu系统xiaozhi server本地部署
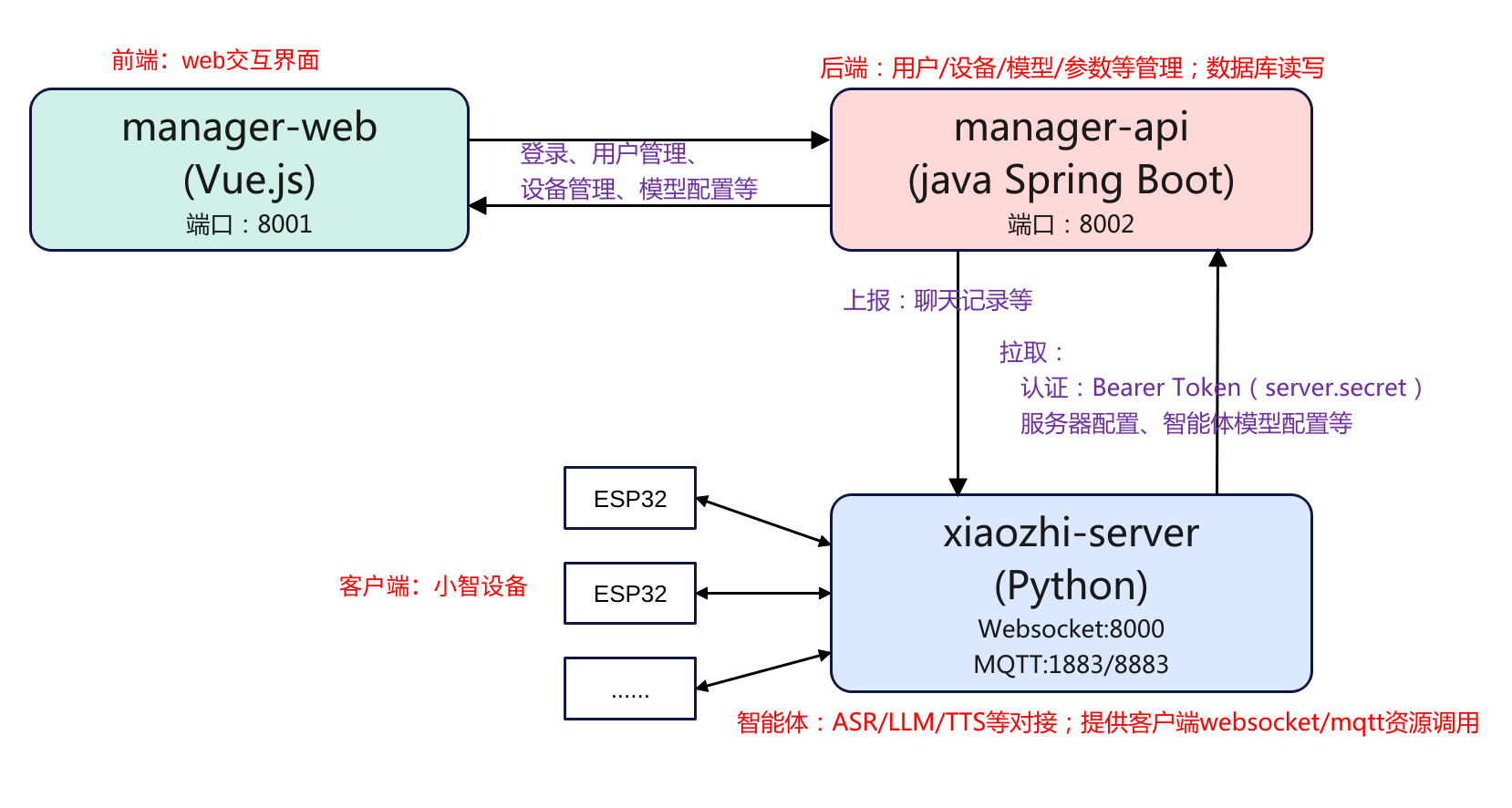
简介 本文主要是记录在ubuntu系统从零源码的方式本地部署小智Ai服务端的过程,项目的地址为:xiaozhi-server。在部署之前简单了解一下其项目框架,这里总结可以分为3部分:manager-web、manager-api、xiaozhi-server,这3部分的运行是互相独立的,相互之间通过http rest api的方式进行访问,如下图: manager-web: 前端控制台(Vue)。管理员用浏览器操作;调用后端接口,不直接连设备。 manager-api: 后端管理服务(Java Spring Boot)。负责用户/设备/模型/参数/OTA/激活等业务,对外提供 REST API;对数据库(MySQL)与缓存(Redis)读写。 xiaozhi-server: 实时语音与智能体服务(Python)。负责 WebSocket 连接、ASR/LLM/TTS、工具/视觉接口;启动时向 manager-api 拉取配置、运行时上报对话。 3个组件分别使用了不用的语言环境,其中manager-web使用的是Vue.js,而manager-api使用的是java spring boot,xiaozhi-server使用的是python。因此需要装3个不同的语言环境。同时对于后端manager-api需要对数据进行存储,因此还需要安装mysql、redis。下面就围绕这3部分进行展开。 先在本地拉取一份代码: git clone https://github.com/xinnan-tech/xiaozhi-esp32-server.git 值得注意的时,xiaozhi server最简化版本安装,只需要安装xiaozhi-server即可,简化版部署见后续章节。 manager-api安装 数据库安装 由于后端的数据管理需要用到数据库,因此需要安装mysql、redis。 (1)mysql安装 # 安装MySQL sudo apt update sudo apt install -y mysql-server # 启动MySQL服务 sudo systemctl start mysql sudo systemctl enable mysql # 创建数据库 sudo mysql -e "CREATE DATABASE xiaozhi_esp32_server CHARACTER SET utf8mb4 COLLATE utf8mb4_unicode_ci;" # 创建用户并指定认证方式(关键改动) sudo mysql -e "CREATE USER 'xiaozhi'@'localhost' IDENTIFIED WITH mysql_native_password BY 'xiaozhi123';" # 授权 sudo mysql -e "GRANT ALL PRIVILEGES ON xiaozhi_esp32_server.* TO 'xiaozhi'@'localhost';" sudo mysql -e "FLUSH PRIVILEGES;" mysql数据库安装后,同时也创建了用户和密码,分别是xiaozhi和xiaozhi123,这个后续需要填充到manaer-api的配置文件中,以便manager-api可以访问。 (2)安装Redis # 安装Redis sudo apt install -y redis-server # 启动Redis服务 sudo systemctl start redis-server sudo systemctl enable redis-server # 检查Redis状态 redis-cli ping Spring boot环境安装 因为后端程序manager-api使用的是java spring boot,因此需要安装java的运行环境。官方提示安装JDK21和Maven,前者是java的运行环境,后者是java项目管理工具。 # 安装JDK 21 sudo apt install -y openjdk-21-jdk # 设置JAVA_HOME环境变量 echo 'export JAVA_HOME=/usr/lib/jvm/java-21-openjdk-amd64' >> ~/.bashrc echo 'export PATH=$JAVA_HOME/bin:$PATH' >> ~/.bashrc source ~/.bashrc # 验证Java安装 java -version # 安装Maven sudo apt install -y maven # 验证Maven安装 mvn -version 配置数据库 数据库和java环境安装好后,就可以配置java spring boot与数据库的连接了。 在xiaozhi-esp32-server/main/manager-api/src/main/resources/application-dev.yml中配置数据库连接信息 @@ -13,8 +13,8 @@ spring: #MySQL driver-class-name: com.mysql.cj.jdbc.Driver url: jdbc:mysql://127.0.0.1:3306/xiaozhi_esp32_server?useUnicode=true&characterEncoding=UTF-8&serverTimezone=Asia/Shanghai&nullCatalogMeansCurrent=true - username: root - password: 123456 + username: xiaozhi + password: xiaozhi123 initial-size: 10 max-active: 100 min-idle: 10 在xiaozhi-esp32-server/main/src/main/resources/application-dev.yml中配置Redis连接信息(redis默认配置好了,不用改) spring: data: redis: host: localhost port: 6379 password: database: 0 编译运行 配置好对数据库的连接后,就可以进行编译了。 # 进入manager-api目录 cd xiaozhi-esp32-server/main/manager-api # 编译项目 mvn clean package -DskipTests # 编译完成后的jar包位置 ls -lh target/*.jar 编译完成之后,就可以运行项目了。 java -jar target/xiaozhi-esp32-api.jar --spring.profiles.active=dev 运行如果没有什么报错就说明启动成功了。 manager-web安装 安装node.js 由于前端使用的的是vue.js,所以需要安装node.js环境。 # 安装Node.js 20 curl -fsSL https://deb.nodesource.com/setup_20.x | sudo -E bash - sudo apt install -y nodejs # 验证Node.js安装 node -v npm -v 安装依赖 node.js环境安装好后,就可以安装manager-web的依赖了。 # 进入manager-web目录 cd xiaozhi-esp32-server/main/manager-web # 安装依赖 npm install 启动 切换到manager-web路径下,就可以运行服务程序了。 cd xiaozhi-esp32-server/main/manager-web npm run serve 启动成功之后,就可以访问后台了。登陆地址:http://127.0.0.1:8001,登陆后进行注册一个用户就可以进入到后台进行配置了。 配置模型api key 要让设备能够访问,需要配置模型的api key,登陆到智普的后台,注册获取一个api key。 这里使用的是智谱ai,注册一个账户,然后申请一个api key 然后登陆智控台配置密钥。 xiaozhi-server安装 conda python环境 # 下载并安装miniconda wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh bash Miniconda3-latest-Linux-x86_64.sh -b -p $HOME/miniconda3 # 初始化conda $HOME/miniconda3/bin/conda init bash source ~/.bashrc # 创建Python环境 conda remove -n xiaozhi-esp32-server --all -y conda create -n xiaozhi-esp32-server python=3.10 -y # 激活环境 conda activate xiaozhi-esp32-server # 添加清华源 conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge # 安装必要的系统库 conda install -y libopus ffmpeg libiconv python依赖包 # 进入xiaozhi-server目录 cd xiaozhi-esp32-server/main/xiaozhi-server # 设置pip镜像源 pip config set global.index-url https://mirrors.aliyun.com/pypi/simple/ # 安装Python依赖 pip install -r requirements.txt 下载语音模型 # 进入models目录 cd xiaozhi-esp32-server/main/xiaozhi-server/models # 下载模型文件(推荐阿里云镜像) cd SenseVoiceSmall wget https://modelscope.cn/models/iic/SenseVoiceSmall/resolve/master/model.pt # 验证文件 ls -lh model.pt 配置密钥 配置密钥主要是xiaozhi-server与manager-api交互时需要进行认证,因此需要先获取密钥。 (1)先在本地创建配置文件 # 创建data目录 cd xiaozhi-esp32-server/main/xiaozhi-server mkdir -p data # 复制配置文件 cp config_from_api.yaml data/.config.yaml # 编辑配置文件 vim data/.config.yaml 配置.config.yaml: manager-api: url: http://127.0.0.1:8002/xiaozhi secret: 待会从智控台获取 server: websocket: ws://你的IP:8000/xiaozhi/v1/ (2)然后登陆智控台获取密钥 访问智控台:http://127.0.0.1:8001 注册账号(第一个为超级管理员) 登录 → 参数管理 → 找到 server.secret 并复制 回到xiaozhi-server配置: vim xiaozhi-esp32-server/main/xiaozhi-server/data/.config.yaml 设置为 manager-api: url: http://127.0.0.1:8002/xiaozhi secret: 你刚才复制的server.secret值 启动服务 cd xiaozhi-esp32-server/main/xiaozhi-server conda activate xiaozhi-esp32-server python app.py 执行成功的话应该是下面这样 (xiaozhi-esp32-server) liumingyuan@HP-ProBook:~/xiaozhi-esp32-server/main/xiaozhi-server$ python app.py 从API读取配置 251029 20:47:34[0.8.5-00000000000000][core.providers.vad.silero]-INFO-SileroVAD 251029 20:47:34[0.8.5-00000000000000][core.utils.modules_initialize]-INFO-初始化组件: vad成功 VAD_SileroVAD 251029 20:47:38[0.8.5-00000000000000][core.providers.asr.fun_local]-INFO-funasr version: 1.2.3. 251029 20:47:38[0.8.5-00000000000000][core.utils.modules_initialize]-INFO-ASR模块初始化完成 251029 20:47:38[0.8.5-00000000000000][core.utils.modules_initialize]-INFO-初始化组件: asr成功 ASR_FunASR 251029 20:47:38[0.8.5-00000000000000][__main__]-INFO-视觉分析接口是 http://10.0.90.104:8003/mcp/vision/explain 251029 20:47:38[0.8.5-00000000000000][__main__]-INFO-Websocket地址是 ws://10.0.90.104:8000/xiaozhi/v1/ 251029 20:47:38[0.8.5-00000000000000][__main__]-INFO-=======上面的地址是websocket协议地址,请勿用浏览器访问======= 251029 20:47:38[0.8.5-00000000000000][__main__]-INFO-如想测试websocket请用谷歌浏览器打开test目录下的test_page.html 251029 20:47:38[0.8.5-00000000000000][__main__]-INFO-============================================================= 服务访问地址: 智控台:http://127.0.0.1:8001 API文档:http://127.0.0.1:8002/xiaozhi/doc.html WebSocket:ws://127.0.0.1:8000/xiaozhi/v1/ OTA接口:http://127.0.0.1:8002/xiaozhi/ota/ 配置websocket和OTA 由于是全模块部署,所以需要登陆智能控台,设置ota和websocket的接口,需要注意的是weboscket的启动必须是要等xiaozhi-server app启动才能设置。 OTA接口:http://你电脑局域网的ip:8002/xiaozhi/ota/ Websocket接口:ws://你电脑局域网的ip:8000/xiaozhi/v1/ 请你务必把以上两个接口地址写入到智控台中:他们将会影响websocket地址发放和自动升级功能。 1、使用超级管理员账号,登录智控台,在顶部菜单找到参数管理,找到参数编码是server.websocket,输入你的Websocket接口。 2、使用超级管理员账号,登录智控台,在顶部菜单找到参数管理,找到数编码是server.ota,输入你的OTA接口。 简化部署 所谓简化部署就是只跑xiaozhi-server,前后端都不跑。简化部署先参考"xiaozhi-server安装"章节,然后再次基础上进行配置文件即可。与完整部署xiaozhi-server部分唯一的区别就是配置文件不一样。如果要对接前后端使用的默认文件是config_from_api.yaml而如果是简化部署使用的默认文件是config.yaml。 下面是配置步骤。 cd xiaozhi-esp32-server/main/xiaozhi-server/data cp .config.yaml .config.yaml_back #对云端的配置作个备份 cp ../config.yaml .config.yaml #拷贝默认的配置 设置API key 测试 本地服务搭建好好后可以进行测试验证,可以使用xiaozhi-server自带的test程序,也可以使用开源的客户端py-xiaozhi,或者直接搭建esp32的设备接入。这里先用前面两者方式。 xiaozhi-server test cd xiaozhi-esp32-server/main/xiaozhi-server/test python -m http.server 8006 然后网页登陆:http://localhost:8006/test_page.html py-xiaozhi git clone https://github.com/huangjunsen0406/py-xiaozhi.git sudo apt-get update && sudo apt-get install -y portaudio19-dev libportaudio2 conda create -n py-xiaozhi-client python=3.10 conda activate py-xiaozhi-client 配置完成之后就可以执行应用获取到设备验证码之后,登陆绑定即可进行对话。 python main.py --protocol websocket -

lekiwi+Orin Nano环境搭建
环境准备 简要记录在Orin nano平台搭建lekiwi环境,可以远程遥控底盘移动和机械臂示教的过程,需要的硬件如下: - NVIDIA Jetson Orin Nano开发板 - Lekiwi套件(底盘、主从机械臂) - PC,预装好Ubuntu系统 组装硬件 将底盘、主从机械臂、Orin nano组装好,需要注意的是由于官方默认使用的计算平台是树莓派,所以默认提供的供电接口是USB 5V。我们这里使用的Orin Nano平台,使用的是DC5525电源接口,因此需要提前购买准备DC5521 to DC5525的转接线。 详细组装可以参考 (1)https://github.com/SIGRobotics-UIUC/LeKiwi/blob/main/Assembly.md (2)https://huggingface.co/docs/lerobot/so101#step-by-step-assembly-instructions Orin nano 首先,首次启动先接上键盘、鼠标、显示器登录配置好网络和VNC。 sudo apt update sudo apt install vino # 设置vino开机自启 mkdir -p ~/.config/autostart cp /usr/share/applications/vino-server.desktop ~/.config/autostart/. cd /usr/lib/systemd/user/graphical-session.target.wants sudo ln -s ../vino-server.service ./. # 调整共享/认证设置 gsettings set org.gnome.Vino prompt-enabled false gsettings set org.gnome.Vino require-encryption false # 设置密码,默认thepassword gsettings set org.gnome.Vino authentication-methods "['vnc']" gsettings set org.gnome.Vino vnc-password $(echo -n 'thepassword'|base64) # 然后重启就可以使用VNC viewer访问了 sudo reboot 其次,安装conda 环境,由于Jetson架构是aarch64,所以下载miniconda aarch64的版本。 wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh sh Miniconda3-latest-Linux-x86_64.sh source ~/.bashrc PC ubunut 同理安装conda环境,与jetson不一样的是,PC是X86架构。 wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh sh Miniconda3-latest-Linux-x86_64.sh source ~/.bashrc 软件安装 代码下载 在Orin nano和PC ubuntu上各自从github上克隆开源代码。 git clone https://github.com/huggingface/lerobot.git 配置安装 首先,在Orin nano和PC ubuntu上各自创建lekiwi的环境。 conda create -n lekiwi python=3.10 conda activate lekiwi 其次,切到lerobot环境下进行安装 cd lerobot pip install -e ".[feetech]" conda install -c conda-forge ffmpeg=7.1.1 遥操作 标定 需要给主臂、从臂进行标定,以限制关节的最大运动范围。在标定前,可以先看看视频怎么操作机械臂https://huggingface.co/docs/lerobot/so101#calibrate (1)从臂的运行命令如下 lerobot-calibrate \ --robot.type=lekiwi \ --robot.id=R1225280 \ --robot.cameras='{handeye: {type: opencv, index_or_path: 0, width: 640, height: 360, fps: 30}}' 标定的文件 (2)主臂的运行命令如下: lerobot-calibrate \ --teleop.type=so101_leader \ --teleop.port=/dev/ttyACM0 \ --teleop.id=R07252801 (3)标定好后会在下面路径存储标定的参数 # orin nano平台 ~/.cache/huggingface/lerobot/calibration/robots/lekiwi/R1225280.json # ubuntu平台 ~/.cache/huggingface/lerobot/calibration/teleoperators/so101_leader/R07252801.json 遥控 (1)由于PC和lekiwi之前的遥控使用的是gRPC,所以需要先安装zmq,否则会报错。 pip install zmq (2)orin nano启动命令,host.connection_time_s设置的是时间(单位是秒),超过这个时间会自动断开。 python -m lerobot.robots.lekiwi.lekiwi_host \ --robot.id=R1225280 \ --robot.cameras='{handeye: {type: opencv, index_or_path: 0, width: 640, height: 360, fps: 30}}' \ --host.connection_time_s=300 (3)PC ubuntu需要修改示例代码,修改点如下: diff --git a/examples/lekiwi/teleoperate.py b/examples/lekiwi/teleoperate.py index 6b430df4..cb4ad415 100644 --- a/examples/lekiwi/teleoperate.py +++ b/examples/lekiwi/teleoperate.py @@ -18,20 +18,20 @@ import time from lerobot.robots.lekiwi import LeKiwiClient, LeKiwiClientConfig from lerobot.teleoperators.keyboard.teleop_keyboard import KeyboardTeleop, KeyboardTeleopConfig -from lerobot.teleoperators.so100_leader import SO100Leader, SO100LeaderConfig +from lerobot.teleoperators.so101_leader import SO101Leader, SO101LeaderConfig from lerobot.utils.robot_utils import busy_wait from lerobot.utils.visualization_utils import init_rerun, log_rerun_data FPS = 30 # Create the robot and teleoperator configurations -robot_config = LeKiwiClientConfig(remote_ip="172.18.134.136", id="my_lekiwi") -teleop_arm_config = SO100LeaderConfig(port="/dev/tty.usbmodem585A0077581", id="my_awesome_leader_arm") +robot_config = LeKiwiClientConfig(remote_ip="192.168.0.33", id="my_lekiwi") +teleop_arm_config = SO101LeaderConfig(port="/dev/ttyACM0", id="R07252801") keyboard_config = KeyboardTeleopConfig(id="my_laptop_keyboard") # Initialize the robot and teleoperator robot = LeKiwiClient(robot_config) -leader_arm = SO100Leader(teleop_arm_config) +leader_arm = SO101Leader(teleop_arm_config) keyboard = KeyboardTeleop(keyboard_config) 将SO100改成SO101,因为我们的主臂使用的是SO101 将remote_ip改成jetson nano的ip 配置好SO101的uart端口和标定的文件 (4)PC ubunut执行命令 python examples/lekiwi/teleoperate.py 之后就可以使用键盘和主臂进行遥控操作了。 Key Action W 前进 S 后退 A 左移 D 右移 Z 左转(逆时针) X 右转(顺时针) R 加速一档 F 减速一档 -

Jetson Orin Nano环境搭建
安装浏览器 sudo apt update sudo apt install chromium-browser -y 安装后发现点击浏览器会没反应。按照下面方法配置。 snap download snapd --revision=24724 sudo snap ack snapd_24724.assert sudo snap install snapd_24724.snap sudo sudo snap refresh --hold snapd 配置VNC sudo apt update sudo apt install vino 然后配置 步骤1: 设置开机自启 对于 LXDE 桌面(例如 2 GB 版本的 Jetson Nano) mkdir -p ~/.config/autostart cp /usr/share/applications/vino-server.desktop ~/.config/autostart/. 对于 GNOME 桌面: cd /usr/lib/systemd/user/graphical-session.target.wants sudo ln -s ../vino-server.service ./. 步骤2:调整共享/认证设置 gsettings set org.gnome.Vino prompt-enabled false gsettings set org.gnome.Vino require-encryption false 步骤3:然后设置密码 # Replace thepassword with your desired password gsettings set org.gnome.Vino authentication-methods "['vnc']" gsettings set org.gnome.Vino vnc-password $(echo -n 'thepassword'|base64) 上面登录密码设置的是thepassword 步骤4: Reboot the system so that the settings take effect sudo reboot SSH ssh user@ip 输入密码就可以登录进去了。 conda环境 wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh sh Miniconda3-latest-Linux-x86_64.sh source ~/.bashrc 注意这里是aarch64 -
语音生成模型:CosyVoice入门实践
是什么 CosyVoice是阿里开源的一款文字转语音的开源模型,可以支持音色复刻。 怎么用 环境安装 (1)代码下载 git clone --recursive https://github.com/FunAudioLLM/CosyVoice.git cd CosyVoice git submodule update --init --recursive 因为CosyVoice仓库中还依赖了第三方的Matcha-TTS,所以克隆本地仓库后,还需要下载第三方的。 (2)创建conda环境 conda create -n cosyvoice -y python=3.10 conda activate cosyvoice pip install -r requirements.txt -i https://mirrors.aliyun.com/pypi/simple/ --trusted-host=mirrors.aliyun.com 创建conda环境并安装依赖。如果没有安装cuda工具的话,还需要执行下面命令安装。 sudo apt install nvidia-cuda-toolkit (3)下载预训练模型 sudo apt update && sudo apt install git-lfs -y mkdir -p pretrained_models git clone https://www.modelscope.cn/iic/CosyVoice2-0.5B.git pretrained_models/CosyVoice2-0.5B git clone https://www.modelscope.cn/iic/CosyVoice-300M.git pretrained_models/CosyVoice-300M git clone https://www.modelscope.cn/iic/CosyVoice-300M-SFT.git pretrained_models/CosyVoice-300M-SFT git clone https://www.modelscope.cn/iic/CosyVoice-300M-Instruct.git pretrained_models/CosyVoice-300M-Instruct git clone https://www.modelscope.cn/iic/CosyVoice-ttsfrd.git pretrained_models/CosyVoice-ttsfrd 上面的模型文件选择一个即可,需要注意的是因为模型比较大,所以要在本地安装git-lfs才能下载大文件。 测试 python3 webui.py --port 50000 --model_dir pretrained_models/CosyVoice-300M 执行上面命令后,就可以登录网页输入http://127.0.0.1:50000/进行测试了。 -
语音识别模型:SenseVoice入门实践
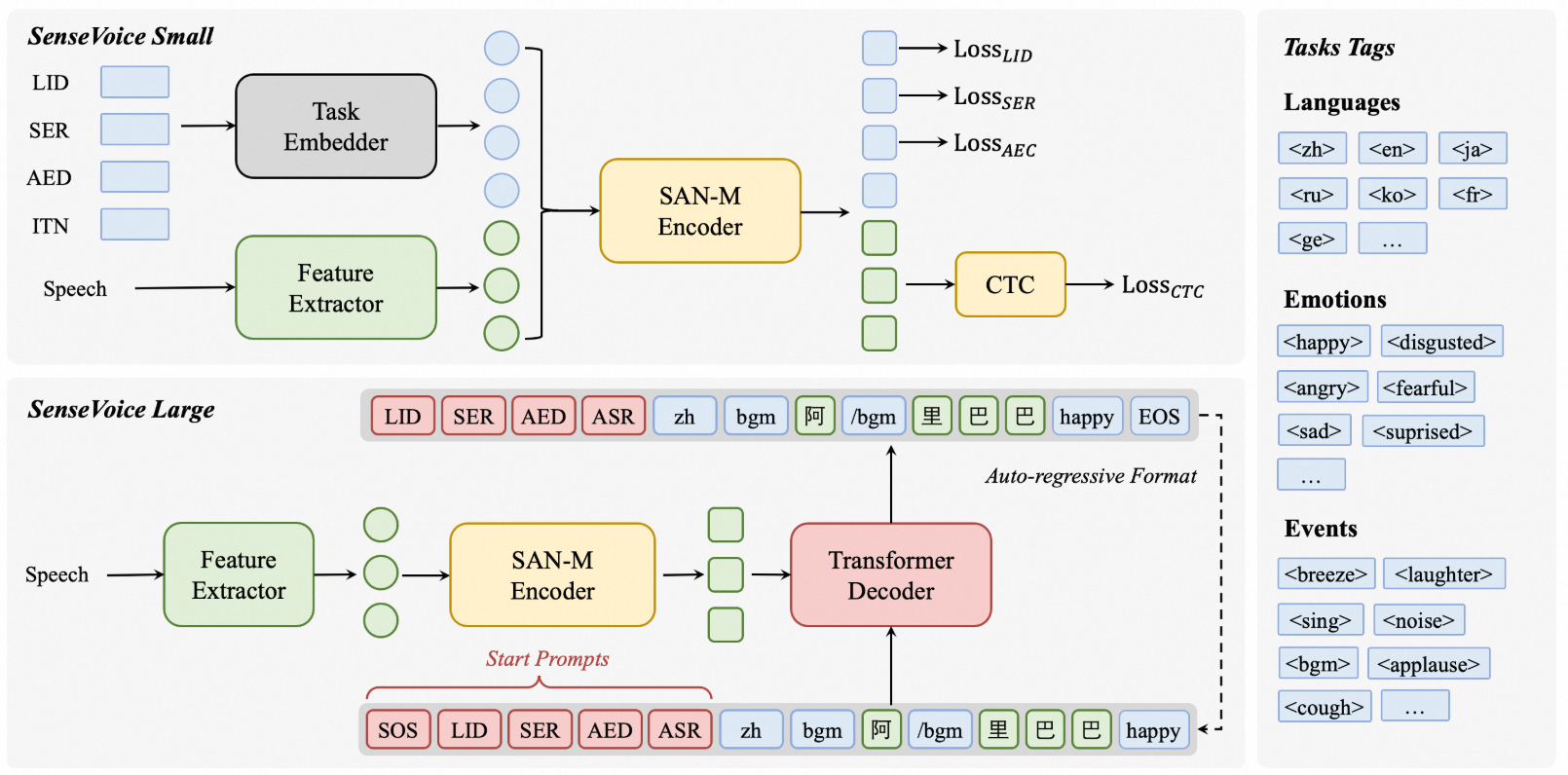
是什么 SenseVoice是多语言识别的模型,支持语音转文字(ASR, Automatic Speech Recognition,自动语音识别),语种识别(LID, Language Identification),语音情感识别(SER, Speech Emotion Recognition),音频事件检测 / 声学事件分类(AED/AEC, Audio Event Detection / Classification),逆文本正则化 / 标点 / 富文本转写等。 怎么用 配置环境 配置一个conda sensevoice环境并且激活。 conda create -n sensevoice python=3.10 conda activate sensevoice 拉取代码,安装依赖 git clone https://github.com/FunAudioLLM/SenseVoice.git cd SenseVoice/ pip install -r requirements.txt 示例测试 代码中有两个示例分别是demo1.py和demo2.py,执行后可以看看效果。 python demo1.py 执行后会自动从modelscope上下载模型和相关配置到本地。 下载到本地后有模型和相关的配置文件以及示例音频。 (sensevoice) laumy@ThinkBook-14-G7-IAH:~/.cache/modelscope/hub/models/iic$ tree . ├── SenseVoiceSmall │ ├── am.mvn │ ├── chn_jpn_yue_eng_ko_spectok.bpe.model │ ├── configuration.json │ ├── config.yaml │ ├── example │ │ ├── en.mp3 │ │ ├── ja.mp3 │ │ ├── ko.mp3 │ │ ├── yue.mp3 │ │ └── zh.mp3 │ ├── fig │ │ ├── aed_figure.png │ │ ├── asr_results.png │ │ ├── inference.png │ │ ├── sensevoice.png │ │ ├── ser_figure.png │ │ └── ser_table.png │ ├── model.pt │ ├── README.md │ └── tokens.json └── speech_fsmn_vad_zh-cn-16k-common-pytorch ├── am.mvn ├── configuration.json ├── config.yaml ├── example │ └── vad_example.wav ├── fig │ └── struct.png ├── model.pt └── README.md 7 directories, 25 files 最后的识别效果为 还可以测试webui版本 python webui.py 然后网址输入:http://127.0.0.1:7860, 注意不能开代理否则会启动失败。 接口调用 主要简要分析一下使用funASR调用示例。 (1)模型加载 model = AutoModel(model=[str], device=[str], ncpu=[int], output_dir=[str], batch_size=[int], hub=[str], **kwargs) model:模型仓库中的名称 device:推理的设备,如gpu ncpu:cpu并行线程。 output_dir:输出结果的输出路径 batch_size:解码时的批处理,样本个数 hub:从modelscope下载模型。如果为hf,从huggingface下载模型。 (2)推理 res = model.generate(input=[str], output_dir=[str]) input:要解码的输入可以是wav文件路径, 例如: asr_example.wav。 output_dir: 输出结果的输出路径。 实时识别 编写一个示例实时识别 #!/usr/bin/env python3 # -*- encoding: utf-8 -*- # Real-time microphone transcription (pure memory) using ALSA (pyalsaaudio) + numpy import argparse import os import signal import sys import time from pathlib import Path from typing import Optional import numpy as np def _safe_imports() -> None: try: import alsaaudio # noqa: F401 except Exception: print( "缺少 pyalsaaudio,请先安装:\n pip install pyalsaaudio\nUbuntu 可能需要:sudo apt-get install -y python3-alsaaudio 或 alsa-utils", file=sys.stderr, ) raise def _safe_import_model(): try: from funasr import AutoModel from funasr.utils.postprocess_utils import rich_transcription_postprocess except Exception: print( "导入 funasr 失败。如果仓库根目录存在本地 'funasr.py',请重命名(如 'funasr_demo.py')以避免遮蔽外部库。", file=sys.stderr, ) raise return AutoModel, rich_transcription_postprocess def int16_to_float32(audio_int16: np.ndarray) -> np.ndarray: if audio_int16.dtype != np.int16: audio_int16 = audio_int16.astype(np.int16, copy=False) return (audio_int16.astype(np.float32) / 32768.0).clip(-1.0, 1.0) def resample_to_16k(audio_f32: np.ndarray, orig_sr: int) -> tuple[np.ndarray, int]: if orig_sr == 16000: return audio_f32, 16000 backend = os.environ.get("SV_RESAMPLE", "poly").lower() # poly|librosa|linear # 优先使用更快的 poly(scipy),其次 librosa,最后线性插值兜底 if backend in ("poly", "auto"): try: from scipy.signal import resample_poly # type: ignore y = resample_poly(audio_f32, 16000, orig_sr) return y.astype(np.float32, copy=False), 16000 except Exception: pass if backend in ("librosa", "auto"): try: import librosa # type: ignore y = librosa.resample(audio_f32, orig_sr=orig_sr, target_sr=16000) return y.astype(np.float32, copy=False), 16000 except Exception: pass # 线性插值兜底(最慢但零依赖) x = np.arange(audio_f32.size, dtype=np.float32) new_n = int(round(audio_f32.size * 16000.0 / float(orig_sr))) if new_n <= 1: return audio_f32, orig_sr new_x = np.linspace(0.0, x[-1] if x.size > 0 else 0.0, new_n, dtype=np.float32) y = np.interp(new_x, x, audio_f32).astype(np.float32) return y, 16000 def _build_cfg_from_env() -> dict: cfg = {} # runtime knobs try: cfg["min_rms"] = float(os.environ.get("SV_MIN_RMS", "0.003")) except Exception: cfg["min_rms"] = 0.003 try: cfg["overlap_sec"] = float(os.environ.get("SV_OVERLAP_SEC", "0.3")) except Exception: cfg["overlap_sec"] = 0.3 cfg["merge_vad"] = os.environ.get("SV_MERGE_VAD", "0") == "1" try: cfg["merge_len"] = float(os.environ.get("SV_MERGE_LEN", "2.0")) except Exception: cfg["merge_len"] = 2.0 cfg["debug"] = os.environ.get("SV_DEBUG") == "1" cfg["resample_backend"] = os.environ.get("SV_RESAMPLE", "poly").lower() cfg["dump_wav_path"] = os.environ.get("SV_DUMP_WAV") return cfg def _select_strong_channel(frame_any: np.ndarray, channels: int, debug: bool) -> np.ndarray: if channels <= 1: return frame_any frame_mat = frame_any.reshape(-1, channels) ch_rms = np.sqrt(np.mean(frame_mat.astype(np.float32) ** 2, axis=0)) sel = int(np.argmax(ch_rms)) if debug: print(f"[debug] multi-channel rms={ch_rms.tolist()}, select ch={sel}", flush=True) return frame_mat[:, sel] def _ensure_pcm_open(alsa_audio, device: str | None, samplerate: int, channels: int, period_frames: int) -> tuple[object, int, str, str]: tried: list[tuple[str, str, str]] = [] for dev in [device or "default", f"plughw:{(device or 'default').split(':')[-1]}" if (device and not device.startswith('plughw')) else None]: if not dev: continue for fmt in (alsa_audio.PCM_FORMAT_S16_LE, alsa_audio.PCM_FORMAT_S32_LE): try: p = alsa_audio.PCM(type=alsa_audio.PCM_CAPTURE, mode=alsa_audio.PCM_NORMAL, device=dev) p.setchannels(channels) p.setrate(samplerate) p.setformat(fmt) p.setperiodsize(period_frames) dtype = np.int16 if fmt == alsa_audio.PCM_FORMAT_S16_LE else np.int32 sample_bytes = 2 if dtype == np.int16 else 4 fmt_name = "S16_LE" if dtype == np.int16 else "S32_LE" return p, sample_bytes, fmt_name, dev except Exception as e: # noqa: BLE001 tried.append((dev, "S16_LE" if fmt == alsa_audio.PCM_FORMAT_S16_LE else "S32_LE", str(e))) continue raise RuntimeError(f"打开 ALSA 设备失败,尝试: {tried}") def _to_int16_mono(raw_bytes: bytes, sample_bytes: int, channels: int, debug: bool) -> np.ndarray: if sample_bytes == 2: frame_any = np.frombuffer(raw_bytes, dtype=np.int16) else: frame_any = np.frombuffer(raw_bytes, dtype=np.int32) frame_any = (frame_any.astype(np.int32) >> 16).astype(np.int16) if channels > 1: frame_any = _select_strong_channel(frame_any, channels, debug) return frame_any.astype(np.int16, copy=False) def _should_infer(audio_f32: np.ndarray, min_rms: float, debug: bool, frames_count: int) -> bool: if audio_f32.size == 0: return False rms = float(np.sqrt(np.mean(np.square(audio_f32)))) if rms < min_rms: if debug: print(f"[debug] frames={frames_count}, rms={rms:.4f} < min_rms={min_rms:.4f}, skip", flush=True) return False return True def _infer_block(model, arr: np.ndarray, sr: int, cfg: dict, language: str, running_cache: dict) -> str: prefer = os.environ.get("SV_INPUT_FORMAT", "f32") # candidate arrays f32 = arr.astype(np.float32, copy=False) i16 = (np.clip(f32, -1.0, 1.0) * 32767.0).astype(np.int16) candidates: list[tuple[np.ndarray, bool]] if prefer == "i16": candidates = [(i16, False), (f32, False), (i16[None, :], True), (f32[None, :], True)] elif prefer == "f32_2d": candidates = [(f32[None, :], True), (f32, False), (i16[None, :], True), (i16, False)] elif prefer == "i16_2d": candidates = [(i16[None, :], True), (i16, False), (f32[None, :], True), (f32, False)] else: candidates = [(f32, False), (i16, False), (f32[None, :], True), (i16[None, :], True)] res = None for cand, _is2d in candidates: try: try: res = model.generate( input=cand, input_fs=sr, cache=running_cache, language=language, use_itn=True, batch_size_s=60, merge_vad=cfg["merge_vad"], merge_length_s=cfg["merge_len"], ) except TypeError: res = model.generate( input=cand, fs=sr, cache=running_cache, language=language, use_itn=True, batch_size_s=60, merge_vad=cfg["merge_vad"], merge_length_s=cfg["merge_len"], ) break except Exception: continue if not res: return "" out = res[0].get("text", "") return out def run_in_memory( model_dir: str, device: str, language: str, samplerate: int, channels: int, block_seconds: float, alsa_device: Optional[str], ) -> None: _safe_imports() AutoModel, rich_post = _safe_import_model() # 关闭底层 tqdm 进度条等多余输出 os.environ.setdefault("TQDM_DISABLE", "1") print("加载模型...", flush=True) model = AutoModel( model=model_dir, trust_remote_code=True, remote_code="./model.py", vad_model="fsmn-vad", vad_kwargs={"max_single_segment_time": 30000}, device=device, disable_update=True, ) import alsaaudio # 更小的 periodsize,降低 I/O 错误概率;推理聚合由 block_seconds 控制 period_frames = max(256, int(0.1 * samplerate)) cfg = _build_cfg_from_env() # 打开设备,尝试 S16 -> S32;必要时切换 plughw 以启用自动重采样/重格式化 pcm, sample_bytes, fmt_name, open_dev = _ensure_pcm_open(alsaaudio, alsa_device, samplerate, channels, period_frames) if cfg["debug"]: print(f"[debug] opened ALSA device {open_dev} fmt={fmt_name} period={period_frames}", flush=True) print( f"开始录音(纯内存采集),设备={alsa_device or 'default'}, sr={samplerate}, ch={channels}, period={period_frames},按 Ctrl+C 停止。\n", flush=True, ) running_cache: dict = {} printed_text = "" # 聚合到这一帧阈值后才调用一次模型,降低调用频率与输出 min_frames = max(1, int(block_seconds * samplerate)) # 重叠帧数,减少句首/句尾丢失 overlap_frames = int(max(0, cfg["overlap_sec"]) * samplerate) block_buf: list[np.ndarray] = [] buf_frames = 0 stop_flag = False def handle_sigint(signum, frame): # noqa: ANN001 nonlocal stop_flag stop_flag = True signal.signal(signal.SIGINT, handle_sigint) # 连续读取 PCM,并聚合达到阈值后执行一次增量推理 while not stop_flag: try: length, data = pcm.read() except Exception as e: # noqa: BLE001 # 读失败时尝试重建(常见于某些 DMIC Raw) if cfg["debug"]: print(f"[debug] pcm.read error: {e}, reopen stream", flush=True) # 尝试使用 plughw 以获得自动格式/采样率适配 dev = alsa_device or "default" if not dev.startswith("plughw") and dev != "default": dev = f"plughw:{dev.split(':')[-1]}" pcm, sample_bytes, fmt_name, open_dev = _ensure_pcm_open(alsaaudio, dev, samplerate, channels, period_frames) length, data = pcm.read() if length <= 0: time.sleep(0.005) continue # 根据实际格式解析 bytes pcm_int16 = _to_int16_mono(data, sample_bytes, channels, cfg["debug"]) block_buf.append(pcm_int16) buf_frames += pcm_int16.size if buf_frames < min_frames: continue # 达到阈值,拼接并转换为 float32 [-1, 1] joined = np.concatenate(block_buf, axis=0) # 为下一个块保留尾部重叠 if overlap_frames > 0 and joined.size > overlap_frames: tail = joined[-overlap_frames:] block_buf = [tail.astype(np.int16, copy=False)] buf_frames = tail.size else: block_buf.clear() buf_frames = 0 audio_block_f32 = int16_to_float32(joined) # 若采样率不是 16k,重采样到 16k audio_block_f32, eff_sr = resample_to_16k(audio_block_f32, samplerate) if not _should_infer(audio_block_f32, cfg["min_rms"], cfg["debug"], joined.size): continue if cfg["debug"]: rms = float(np.sqrt(np.mean(np.square(audio_block_f32)))) print(f"[debug] frames={joined.size}, eff_sr={eff_sr}, rms={rms:.4f}, infer", flush=True) # 可选:调试时将当前块写到一个覆盖的临时 WAV(重采样后,单声道16k),方便用 aplay 检查采音 if cfg["dump_wav_path"]: import wave, tempfile dump_path = cfg["dump_wav_path"] or str( Path(tempfile.gettempdir()) / "sv_debug_block.wav" ) with wave.open(dump_path, "wb") as wf: wf.setnchannels(1) wf.setsampwidth(2) wf.setframerate(eff_sr) dump_i16 = (np.clip(audio_block_f32, -1.0, 1.0) * 32767.0).astype(np.int16) wf.writeframes(dump_i16.tobytes()) # 执行推理 res_text = _infer_block(model, audio_block_f32, eff_sr, cfg, language, running_cache) if not res_text: continue text = rich_post(res_text) if text.startswith(printed_text): new_part = text[len(printed_text) :] else: new_part = text if new_part: print(new_part, end="", flush=True) printed_text += new_part # 停止前做一次 flush:如果还有残留缓冲,强制推理,避免句尾丢失 if block_buf: try: joined = np.concatenate(block_buf, axis=0) audio_block_f32 = int16_to_float32(joined) audio_block_f32, eff_sr = resample_to_16k(audio_block_f32, samplerate) text = _infer_block(model, audio_block_f32, eff_sr, cfg, language, running_cache) text = rich_post(text) if text: print(text[len(printed_text):], end="", flush=True) except Exception: pass print("\n已停止。") def main() -> None: parser = argparse.ArgumentParser(description="Real-time mic transcription (in-memory ALSA)") parser.add_argument("--model", default="iic/SenseVoiceSmall", help="模型仓库或本地路径") parser.add_argument("--device", default="cuda:0", help="设备,如 cuda:0 或 cpu") parser.add_argument("--language", default="auto", help="语言代码或 'auto'") parser.add_argument("--samplerate", type=int, default=16000, help="采样率") parser.add_argument("--channels", type=int, default=1, help="通道数") parser.add_argument("--block-seconds", type=float, default=1.0, help="每次推理块时长(秒)") parser.add_argument("--min-rms", type=float, default=0.003, help="触发推理的最小能量阈值(0-1)") parser.add_argument("--overlap-seconds", type=float, default=0.3, help="块间重叠时长(秒),减少句首/句尾丢失") parser.add_argument("--merge-vad", action="store_true", help="启用 VAD 合并(默认关闭以获得更快输出)") parser.add_argument("--merge-length", type=float, default=2.0, help="VAD 合并的最大分段时长(秒)") parser.add_argument("--debug", action="store_true", help="打印调试信息(RMS、帧数等)") parser.add_argument("--alsa-device", default=None, help="ALSA 设备名(如 hw:0,0 或 default)") args = parser.parse_args() # 将 CLI 设置传入环境变量,供运行体内读取 if args.debug: os.environ["SV_DEBUG"] = "1" os.environ["SV_MIN_RMS"] = str(args.min_rms) os.environ["SV_MERGE_VAD"] = "1" if args.merge_vad else "0" os.environ["SV_MERGE_LEN"] = str(args.merge_length) os.environ["SV_OVERLAP_SEC"] = str(args.overlap_seconds) run_in_memory( model_dir=args.model, device=args.device, language=args.language, samplerate=args.samplerate, channels=args.channels, block_seconds=args.block_seconds, alsa_device=args.alsa_device, ) if __name__ == "__main__": main() 执行前先安装一下模块组件 pip install pyalsaaudio 接着运行,就可以实时说话转换为文字了。 python demo_realtime_memory.py --alsa-device plughw:0,6 --samplerate 48000 --channels 2 --block-seconds 1.0 --language zh --device cuda:0 参考:https://github.com/FunAudioLLM/SenseVoice -
Isaac Sim 快速入门:三种工作流程示例
简介 如果是NVIDIA Isaac Sim的新用户,可以按照本文的两个示例来体验Isaac Sim。本文主要提供Isaac Sim基础使用教程、机器人基础教程。 在快速入门教程中,所有可通过 GUI 执行的操作同样也能用 Python 实现。您可以在 GUI 操作与 Python 脚本之间自由切换。您在 GUI 中创建的所有内容都能保存为 USD 文件的一部分。 例如,您可以通过图形界面创建世界,并为机器人添加所需动作。随后将整个 USD 文件导入独立的 Python 脚本中,根据需求系统性地修改属性。 基础使用教程 本教程涵盖 Isaac Sim 的基础操作,包括界面导航、场景对象添加、查看对象基本属性以及运行模拟等内容。 通过本教程,您将从空白场景开始,根据三种不同工作流程的选择,最终实现机器人运动控制。提供三种不同工作流程的目的是展示 Isaac Sim 可根据需求以多种方式灵活使用。 可以查看两种工作流中的脚本以了解它们的差异。通过对比分析,有助于掌握如何执行完全相同的任务: 扩展脚本可在Window > Examples > Robotics Examples中找到,然后单击浏览器右上角的**Open Script **按钮。 独立脚本位于 \<isaac-sim-root-dir>/standalone_examples/tutorials/ 文件夹内。 可以通过编辑扩展示例中的任意脚本来体验"hot-reloading"功能。保存文件后,无需关闭模拟器即可立即看到变更生效。 在官方教程中有3个标签页,三个标签页执行相同操作并达成相同结果。 GUI: 图形用户界面 Extensions:扩展功能 Standalone Python:独立Python环境 GUI方式 步骤1:启动Isaac Sim linux:cd ~/isaacsim && ./isaac-sim.selector.sh windows:双击isaac-sim.selector.bat 模拟器完全加载后,创建新场景: 从顶部菜单栏点击File > New。首次启动 Isaac Sim 时,可能需要 5-10 分钟完成初始化。 步骤2: 添加地平面 为场景添加地平面:从顶部菜单栏点击Create > Physics > Ground Plane。 步骤3:添加光源 可以为场景添加光源以照亮其中的物体。如果场景中有光源但没有物体反射光线,场景仍会显得昏暗。 在顶部菜单栏中,点击Create > Lights > Distant Light。 步骤4:添加视觉立方体 "视觉"立方体是指没有附加物理属性的立方体,例如没有质量、没有碰撞体积。这种立方体不会受重力影响下落,也不会与其他物体发生碰撞。 从顶部菜单栏中,依次点击Create > Shape > Cube. 在用户界面最左侧找到箭头图标并点击Play。运行模拟时立方体不会有任何动作。 步骤5:移动、旋转与缩放立方体 使用左侧工具栏上的各种操控工具来操作立方体。 按下"W"键或点击移动工具即可拖拽移动立方体。通过点击箭头并拖拽可单轴移动,点击彩色方块并拖拽可双轴移动,点击工具中心的圆点并拖拽则可三轴自由移动。 按下“E”键或点击旋转控制器来旋转立方体。 按下“R”键或点击缩放控制器来调整立方体大小。点击箭头并拖动可单维度缩放,点击彩色方块并拖动可双维度缩放,点击控制器中心的圆圈并拖动则可实现三维同步缩放。 按下“esc”键取消选中立方体。 对于“移动”和“旋转”操作,可选择基于局部坐标系或世界坐标系进行操作。长按控制器即可查看选项。 可以通过立方体的Property属性面板进行更精确的修改,只需在对应输入框中输入具体数值即可。点击输入框旁的蓝色方块可将数值重置为默认值。 步骤6:添加物理与碰撞属性 常见的物理属性包括质量和惯性矩阵,这些属性使物体能够在重力作用下下落。碰撞属性则决定了物体能否与其他物体发生碰撞。 物理和碰撞属性可以分别添加,因此你可以创建一个能与其他物体碰撞但不受重力影响的物体,或是受重力影响但不会与其他物体碰撞的物体。但在多数情况下,这两个属性会同时添加。 为立方体添加物理和碰撞属性: 在场景树中找到对象("/World/Cube")并高亮显示它。 从工作区右下角的Property属性面板中,点击"Add"按钮并在下拉菜单中选择Physics。这将显示可添加到对象的一系列属性选项。 选择Rigid Body with Colliders Preset“带碰撞器的刚体预设”可为对象同时添加物理和碰撞网格。 按下播放Play按钮,观察立方体在重力作用下坠落并与地平面发生碰撞。 教程结束,记得保存你的工作。 扩展功能方式 通过一个名为"脚本编辑器"的现有扩展模块来演示扩展工作流的特性。脚本编辑器允许用户通过 Python 与场景进行交互。主要使用与独立 Python 工作流相同的 Python API。当我们开始与模拟时间轴交互时,特别是下一个教程中,这两种工作流的区别将变得清晰。 步骤1:启动 启动一个新的 Isaac Sim 实例,转到顶部菜单栏并点击Window > Script Editor。 步骤2:添加地平面 要通过交互式 Python 添加地平面,请将以下代码片段复制粘贴到脚本编辑器中,然后点击底部的运行Run按钮执行。 from isaacsim.core.api.objects.ground_plane import GroundPlane GroundPlane(prim_path="/World/GroundPlane", z_position=0) 步骤3:添加光源 可以为场景添加光源以照亮其中的物体。如果场景中有光源但没有物体反射光线,场景仍会显得昏暗。 在脚本编辑器中新建一个标签页(Tab > Add Tab)。 在脚本编辑器中复制粘贴以下代码片段并运行,即可添加光源。 import omni.usd from pxr import Sdf, UsdLux stage = omni.usd.get_context().get_stage() distantLight = UsdLux.DistantLight.Define(stage, Sdf.Path("/DistantLight")) distantLight.CreateIntensityAttr(300) 步骤4:添加视觉立方体 在脚本编辑器中新建一个标签页 (Tab > Add Tab)。 在脚本编辑器中复制粘贴以下代码片段并运行,即可添加两个立方体。我们将保留其中一个作为纯视觉对象,同时为另一个添加物理和碰撞属性以便对比。 import numpy as np from isaacsim.core.api.objects import VisualCuboid VisualCuboid( prim_path="/visual_cube", name="visual_cube", position=np.array([0, 0.5, 0.5]), size=0.3, color=np.array([255, 255, 0]), ) VisualCuboid( prim_path="/test_cube", name="test_cube", position=np.array([0, -0.5, 0.5]), size=0.3, color=np.array([0, 255, 255]), ) Isaac Sim 核心 API 是对原生 USD 和物理引擎 API 的封装。您可以使用原生 USD API 添加一个视觉立方体(不含物理和颜色属性)。请注意原生 USD API 更为冗长,但能提供对每个属性的更精细控制。 from pxr import UsdPhysics, PhysxSchema, Gf, PhysicsSchemaTools, UsdGeom import omni # USD api for getting the stage stage = omni.usd.get_context().get_stage() # Adding a Cube path = "/visual_cube_usd" cubeGeom = UsdGeom.Cube.Define(stage, path) cubePrim = stage.GetPrimAtPath(path) size = 0.5 offset = Gf.Vec3f(1.5,-0.2,1.0) cubeGeom.CreateSizeAttr(size) if not cubePrim.HasAttribute("xformOp:translate"): UsdGeom.Xformable(cubePrim).AddTranslateOp().Set(offset) else: cubePrim.GetAttribute("xformOp:translate").Set(offset) 步骤5:添加物理与碰撞属性 在 Isaac Sim 核心 API 中,我们为常用对象编写了封装器,这些封装器附带所有物理和碰撞属性。您可以通过以下代码片段添加一个具有物理和碰撞属性的立方体。 import numpy as np from isaacsim.core.api.objects import DynamicCuboid DynamicCuboid( prim_path="/dynamic_cube", name="dynamic_cube", position=np.array([0, -1.0, 1.0]), scale=np.array([0.6, 0.5, 0.2]), size=1.0, color=np.array([255, 0, 0]), ) 另外,如果想修改现有对象使其具备物理和碰撞属性,可以使用以下代码片段。 from isaacsim.core.prims import RigidPrim RigidPrim("/test_cube") from isaacsim.core.prims import GeometryPrim prim = GeometryPrim("/test_cube") prim.apply_collision_apis() 点击播放Play按钮,观察立方体在重力作用下坠落并与地平面碰撞。 步骤6: 移动、旋转与缩放立方体 使用核心 API 移动物体: import numpy as np from isaacsim.core.prims import XFormPrim translate_offset = np.array([[1.5,1.2,1.0]]) orientation_offset = np.array([[0.7,0.7,0,1]]) # note this is in radians scale = np.array([[1,1.5,0.2]]) stage = omni.usd.get_context().get_stage() cube_in_coreapi = XFormPrim(prim_paths_expr="/test_cube") cube_in_coreapi.set_world_poses(translate_offset, orientation_offset) cube_in_coreapi.set_local_scales(scale) 使用原始 USD API 移动物体: from pxr import UsdGeom, Gf import omni.usd stage = omni.usd.get_context().get_stage() cube_prim = stage.GetPrimAtPath("/visual_cube_usd") translate_offset = Gf.Vec3f(1.5,-0.2,1.0) rotate_offset = Gf.Vec3f(90,-90,180) # note this is in degrees scale = Gf.Vec3f(1,1.5,0.2) # translation if not cube_prim.HasAttribute("xformOp:translate"): UsdGeom.Xformable(cube_prim).AddTranslateOp().Set(translate_offset) else: cube_prim.GetAttribute("xformOp:translate").Set(translate_offset) # rotation if not cube_prim.HasAttribute("xformOp:rotateXYZ"): # there are also "xformOp:orient" for quaternion rotation, as well as "xformOp:rotateX", "xformOp:rotateY", "xformOp:rotateZ" for individual axis rotation UsdGeom.Xformable(cube_prim).AddRotateXYZOp().Set(rotate_offset) else: cube_prim.GetAttribute("xformOp:rotateXYZ").Set(rotate_offset) # scale if not cube_prim.HasAttribute("xformOp:scale"): UsdGeom.Xformable(cube_prim).AddScaleOp().Set(scale) else: cube_prim.GetAttribute("xformOp:scale").Set(scale) 独立python环境方式 脚本位于standalone_examples/tutorials/getting_started.py,要运行该脚本,请打开终端,导航至 Isaac Sim 安装根目录,并执行以下命令: ./python.sh standalone_examples/tutorials/getting_started.py 机器人基础教程 本小节介绍如何将机器人添加到场景中、移动机器人以及检查机器人状态。在开始教程前,请确保已经完成了上一章节isaac sim基础使用教程。 GUI方式 步骤1:向场景中添加机器人 新建场景:通过File > New Stage.。 添加机器人:向场景添加机器人,从顶部菜单栏点击Create > Robots > Franka Emika Panda Arm。 步骤2:检查机器人 使用物理检查器查看机器人关节属性。 前往Tools > Physics > Physics Inspector.。右侧将打开一个窗口。 选择 Franka 进行检查。窗口默认会显示关节信息,例如上下限位及默认位置。 点击右上角的三横线图标可查看更多选项,例如关节刚度和阻尼系数。 可选)修改这些数值,观察舞台上机器人随参数变化的运动。修改成功后会出现绿色对勾标记。 点击绿色对勾按钮,将当前参数设为机器人新的默认值。 步骤3:控制机器人 基于图形界面的机器人控制器位于 Omniverse 可视化编程工具 OmniGraphs 中。OmniGraph 相关章节提供了更深入的教程指导。本教程将通过快捷工具生成控制图,然后在 OmniGraph 编辑器中查看该控制图。 通过菜单栏选择 Tools > Robotics > Omnigraph Controllers > Joint Position.来打开控制图生成器。。 在新弹出的关节位置控制器**Articulation Position Controller Inputs **输入窗口中,点击 Robot Prim 字段旁的添加"Add"按钮。 选择 Franka 作为目标对象。 点击确定生成图表。 要移动机器人的话按照下面步骤 在右上角的“舞台”选项卡中,选择Graph > Position_Controller.。 选择 JointCommandArray 节点。您可以通过在舞台树中选择该节点,或在图表编辑器中选择该节点来完成此操作。 在右下角的Property选项卡中,可以看到关节命令值。构造数组节点Construct Array Node下的输入Inputs项对应机器人上的关节,从基座关节开始。 点击+按住+拖动不同的数值字段,或输入不同的值,可以看到机械臂位置发生变化。 点击Play开始模拟。 要生成可视化的图标 打开图表编辑器窗口:**Window > Graph Editors > Action Graph. **。该编辑器窗口会在包含机器人的视口选项卡下方以新选项卡形式打开。 调出新打开的浏览器标签页。 点击位于图形编辑器窗口中央的Edit Action Graph选项。 从列表中选择唯一存在的图形。 选择一个数组并查看Stage和Property选项卡,以了解每个数组节点关联的值。 在图形中选择"关节控制器"Articulation Controller对象以查看其属性。 Extension方式 步骤1:向场景添加机器人 新建一个场景(File > New)。要将机器人添加到场景中,请将以下代码片段复制粘贴到脚本编辑器中并运行。 import carb from isaacsim.core.prims import Articulation from isaacsim.core.utils.stage import add_reference_to_stage from isaacsim.storage.native import get_assets_root_path import numpy as np assets_root_path = get_assets_root_path() if assets_root_path is None: carb.log_error("Could not find Isaac Sim assets folder") usd_path = assets_root_path + "/Isaac/Robots/FrankaRobotics/FrankaPanda/franka.usd" prim_path = "/World/Arm" add_reference_to_stage(usd_path=usd_path, prim_path=prim_path) arm_handle = Articulation(prim_paths_expr=prim_path, name="Arm") arm_handle.set_world_poses(positions=np.array([[0, -1, 0]])) 步骤2:检查机器人 Isaac Sim 核心 API 提供了许多函数调用来获取机器人相关信息。以下是查询关节数量与名称、各类关节属性以及关节状态的示例代码。 在脚本编辑器中新建标签页,复制粘贴以下代码片段。该操作需在上一步添加机器人完成后执行(此时 arm_handle 已创建)。运行代码前需先点击播放Play按钮,这些命令需在物理引擎运行状态下才能生效。 # Get the number of joints num_joints = arm_handle.num_joints print("Number of joints: ", num_joints) # Get joint names joint_names = arm_handle.joint_names print("Joint names: ", joint_names) # Get joint limits joint_limits = arm_handle.get_dof_limits() print("Joint limits: ", joint_limits) # Get joint positions joint_positions = arm_handle.get_joint_positions() print("Joint positions: ", joint_positions) 请注意,点击"运行"时仅会打印一次状态信息,即使模拟正在持续运行。如需查看最新状态,需反复点击"运行"按钮。若希望在每个物理步长都打印信息,需要将这些命令插入到每个物理步长都会执行的回调函数中。在章节"工作流程"中详细讲解时间步进机制。 要将命令插入物理回调中,请在脚本编辑器的单独标签页中运行以下代码片段。 import asyncio from isaacsim.core.api.simulation_context import SimulationContext async def test(): def print_state(dt): joint_positions = arm_handle.get_joint_positions() print("Joint positions: ", joint_positions) simulation_context = SimulationContext() await simulation_context.initialize_simulation_context_async() await simulation_context.reset_async() simulation_context.add_physics_callback("printing_state", print_state) asyncio.ensure_future(test()) 按下播放键启动模拟,然后运行该代码片段。您将看到终端在每个物理步骤打印出的信息。 如果不再需要每个物理步骤都打印信息,可以通过运行以下代码片段来移除物理回调。 simulation_context = SimulationContext() simulation_context.remove_physics_callback("printing_state") 步骤3:控制机器人 在 Isaac Sim 中有多种控制机器人的方式。最底层是直接发送关节指令来设置位置、速度和力矩。以下是通过关节层级的 Articulation API 控制机器人的示例。 在脚本编辑器中新建一个标签页,复制粘贴以下代码片段。该代码需在前述添加机器人步骤完成后运行(此时 arm_handle 已建立)。运行代码片段前请先点击播放键Play。这些指令需在物理引擎运行状态下生效。我们将提供两个位置供您切换。若您已将上述打印状态代码片段添加至每个物理步骤,当机器人移动时您应能看到打印的关节编号发生变化。 # Set joint position randomly arm_handle.set_joint_positions([[-1.5, 0.0, 0.0, -1.5, 0.0, 1.5, 0.5, 0.04, 0.04]]) # Set all joints to 0 arm_handle.set_joint_positions([[0.0, 0.0, 0.0 , 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]) 与前述 get_joint_positions 功能类似,此处的 set_joint_positions 仅在您点击"运行"时执行一次。若您希望在每个物理步骤发送指令,则需将这些命令插入到每个物理步骤都会执行的物理回调函数中。 独立Python方式 脚本位于 standalone_examples/tutorials/getting_started_robot.py 。要运行该脚本,请打开终端,导航至 Isaac Sim 安装的根目录,并执行以下命令: ./python.sh standalone_examples/tutorials/getting_started_robot.py 到此就完成了基本的操作了,接下来就是一系列的教程可以参考:《机器人设置教程系列》。 -
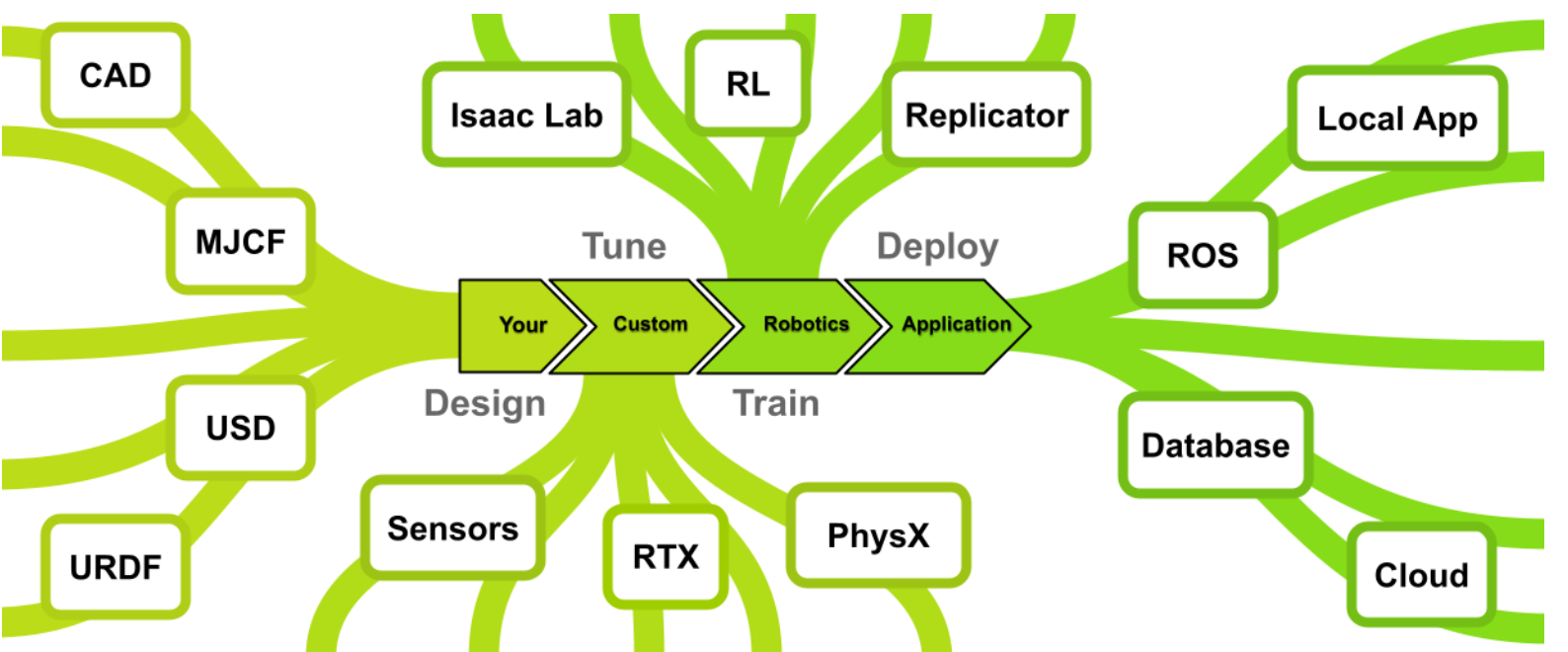
Isaac Sim v5.0.0:探索AI 机器人仿真平台
什么是isaac sim NVIDIA Issac Sim是一款基于NVIDIA omniverse构建的参考应用应用程序,使开发人员能够在基于物理的虚拟环境开发、模拟和测试AI机器人。 设计 Isaac Sim提供了一系列工作流程,用于导入和调整最常见格式(包括Onshape、统一机器人描述格式URDF和MuJoco XML格式MJCF)设计的机械系统。这通过使用通用常见描述USD实现,该开源3D常见描述API具有高度可扩展性,是Isaac Sim核心的统一数据交换格式。 微调与训练 Isaac Sim的核心功能在与其仿真能力本身:这是一个基于GPU的高保真physX物理引擎,能够支持工业规模的传感器PTX渲染。该平台通过直接调用GPU,实现了对各类传感器(包括摄像头、激光雷达和接触式传感器)的仿真模拟。这种能力进而支持数字孪生技术的实现,让您的端到端流程在真实机器人启动前就能完成测试运行。Isaac Sim提供了一整套工具链:通过Replicator生成合成数据,利用Omnigraph编程仿真环境,调整PhysX参数以匹配实现物理特性,最终通过强化学习RL等多样化方法训练控制智能体。 部署 Isaac Sim预先配备了所有必要组建,不仅能将智能体部署到真实机器人,还能构建与这类系统完全集成的应用程序。Omniverse提供了应用基础设施API,包括图形界面和文件管理功能。该平台还提供了与ROS 2桥接API,实现真实机器人与仿真的直接通信,同时搭建NVIDIA Isaac ROS:一套高性能硬件加速的ROS 2工具包,专为打造自主机器人而设计。 快速入门 快速安装:一小时内完成安装并开始使用。 Isaac Sim基础教程:助您快速上手 NVIDIA Isaac 仿真平台 工作站安装:本地工作站安装指南。 容器安装:远程桌面服务器安装指南。 开发工具:用于调试和开发的工具与环境。 python脚本与教程:使用 NVIDIA Isaac Sim 核心 Python API 构建环境、机器人和任务的工具与教程。 图形用户界面参考:通过图形用户界面了解 NVIDIA Isaac Sim 中的机器人基础概念。 导入与导出功能:支持多种文件格式的机器人及资产导入导出功能。 机器人设置:Isaac Sim 提供的机器人修改工具集。 机器人设置教程系列:关于机器人配置工具及工作流程的系列教学。 机器人仿真:用于模拟机器人的控制器与运动生成工具。 ROS2:ROS2桥接与接口。 Isaac Lab:强化学习框架与克隆器API。 合成数据生成:用于生成合成书记的工具集与工作流程。 数字孪生::用于构建和操作数字孪生的工具,如仓库物流、Cortex 和地图绘制。 系统架构 Isaac Sim旨在支持新型机器人工具的创建,并增强现有工具的功能。该平台为为C++和Python提供了灵活的API,可根据需求以不同深度集成到项目中。平台目标并非与现有软件竞争,而是与之协调并提升其能力。为此,Isaac Sim的许多组建都是开源的,可自由独立使用。可以在Onshape中设计机器人,用Isaac Sim模拟传感器,并通过ROS或其他消息系统控制场景。同样,也可以完全基于isaac sim提供的ingt构建完整的独立应用程序。 Omniverse Kit Isaac Sim基于Omniverse Kit构建,这是一个用于开发原生Omniverse应用和微服务的工具包。Omniverse Kit通过一系列轻量级插件提供多样化功能。这些插件采样C语言接口开发以确保API持久兼容性,同时提供python解释器以便进行便捷的脚本编写和定制。 通过 Python API 可以为 Omniverse Kit 编写新扩展,或为 Omniverse 创建新体验。 开发工作流 Isaac Sim基于C++和Python构建,通常分别通过编译插件和绑定进行操作。这意味着该平台能够支持多种工作流程,拥有构建和交互利用Isaac Sim项目。Isaac Sim提供完整的OMniverse应用程序,拥有与机器人交互和仿真,虽然这是用户与平台互动的最常见方式,但绝非唯一途径。Isaac Sim还以VS code和Jupyter Notebook扩展形式提供直接python开发支持。此外Isaac Sim不仅限与同步操作,还能通过ROS2实现硬件在环运行,从而促进仿真到现实的迁移以及数字孪生应用。 USD格式 NVIDIA Isaac Sim采用USD通过常见描述文件格式呈现常见。Universal Scene Description(USD)是由皮克斯开发的一种易于扩展的开源 3D 场景描述文件格式,专为内容创作和不同工具间的交互而设计。凭借其强大功能和通用性,USD 不仅被视觉特效领域广泛采用,还应用于建筑、设计、机器人、制造等多个学科领域。 安装指南 Isaac Sim支持windows和Linux系统安装。可通过容器( container)、工作站(workstation)、云端(in the cloud)、直播流(livestream)或者python环境进行部署,根据使用场景,还可以自定义硬件配置。 快速安装 快速安装适用于演示场景,可让您了解完整产品的功能概览。完成快速安装后,您能创建包含机器人的虚拟房间,这将更全面的展示产品能力。该只能面向具备基础计算机知识的安装人员。 windows或linux系统快速安装步骤: (1)下载以下任意安装包 windows: windows系统兼容性检查工具 linux:linux系统兼容性检查工具 (2)将安装包解压至制定文件夹 (3)运行脚本检查 window:请双击 omni.isaac.sim.compatibility_check.bat。 linux:./omni.isaac.sim.compatibility_check.sh 更多信息参阅:Isaac Sim兼容性检查 (4)下载任意一个安装包 window:https://download.isaacsim.omniverse.nvidia.com/isaac-sim-standalone-5.0.0-windows-x86_64.zip linux:https://download.isaacsim.omniverse.nvidia.com/isaac-sim-standalone-5.0.0-linux-x86_64.zip (5)创建一个isaac-sim的文件夹 在windows的C:/或linux根目录下直接创建一个名为isaac-sim的文件夹。然后将下载的文件解压到文件夹中去。 (6)在isaac-sim文件夹中,执行操作 window:请双击 isaac-sim.selector.bat linux:命令窗口中运行 ./post_install.sh ,然后运行 ./isaac-sim.selector.sh。 (7)在issac应用选择起窗口,选择"start" 有关应用选择器的详细信息,请参阅《Isaac Sim 应用选择器》。随后将打开另一个命令窗口并运行脚本,此过程可能比预期耗时更长。在此期间由于会出现空白窗口,可能看似安装失败。请继续等待。 (8)issac启动成功 (9)选择 选择创建一个房间 Create > Environment > Simple Room. (10)选择创建一个机械臂 Create > Robots > Franka Emika Panda Arm. (11)点击运行模拟 在屏幕最左侧寻找箭头按钮,点击它来运行一段简短模拟。 isaac 系统需求 对操作系统需求如下 对驱动的要求如下 工作站安装 工作站安装方式是在本地允许模拟器,需要对本地电脑有较高的要求,官方要求最低的配置要为RTX4080的显卡。因此若本地配置了GPU的windows或linux系统上以GUI应用程序允许isaac sim,推荐采用工作站安装方式。下面是安装步骤 (1)isaac Sim兼容性检查工具 Isaac 兼容性检查工具是一款轻量级应用程序,可通过编程方式检查本地的软硬件要求,会给出运行NVIDIA isaac sim时那些要求满足或不满足。 下载工具:Latest Release兼容性工具 解压:将压缩包解压到指定文件夹。 运行:在Linux系统上云霄omni.isaac.sim.compatibility_check.sh脚本,在windows系统上运行omni.isaac.sim.compatibility_check.bat文件。 点击工具的"Test Kit"按钮就会显示测试结果。 应用程序会以不同颜色高亮显示以下状态: 绿色:表示优秀 浅绿色:表示良好 橙色:表示基本满足,建议更高配置 红色:不足/不支持 应用程序检查维度为: NVIDIA GPU:驱动程序版本、支持RTX功能的GPU、显存容量。 CPU、内存和存储:CPU处理器、CPU核心数量、运行内存、可用存储空间。 others:操作系统、显示设备。 对于操作系统如果ubuntu大于版本号也会变成红色,可先测试是否可运行,实测是可以,但不排除有兼容性问题。 (2)下载软件包 下载链接:Latest Release,根据自己的系统选择软件包下载的本地。 在本地创建一个isaacsim文件夹,然后将压缩包解压到文件夹。 (3)运行启动 先创建extension_examples 的符号链接,请运行 post_install 脚本。 linux:./post_install.sh windows:双击 post_install.bat 文件 然后就可以启动应用程序 linux: 执行 ./isaac-sim.selector.sh windows:双击isaac-sim.selector.bat 文件 启动后会弹出以下界面 在弹出的窗口中选择isaac Sim Full,然后点击START就可以运行。启动过程中可能要一点时间,如果期间弹出“程序无法响应”,可以选择等待,以免被误杀。 启动后就可以开始第一个基础教程了:基础教程。 总结一下命令执行的实例: linux系统 mkdir ~/isaacsim cd ~/Downloads unzip "isaac-sim-standalone-5.0.0-linux-x86_64.zip" -d ~/isaacsim cd ~/isaacsim ./post_install.sh ./isaac-sim.selector.sh window系统 mkdir C:\isaacsim cd %USERPROFILE%/Downloads tar -xvzf "isaac-sim-standalone-5.0.0-windows-x86_64.zip" -C C:\isaacsim cd C:\isaacsim post_install.bat isaac-sim.selector.bat Docker容器安装 在远程服务器或者云端部署isaac sim建议使用docker容器的方式。 (1)检查系统是否满足需求 首先先确保系统满足运行NVIDIA isaac Sim所需的系统要求和驱动程序要求。 (2)安装docker Docker installation using the convenience script curl -fsSL https://get.docker.com -o get-docker.sh sudo sh get-docker.sh Post-install steps for Docker sudo groupadd docker sudo usermod -aG docker $USER newgrp docker Verify Docker docker run hello-world 详细的docker安装步骤见docker安装,安装后的配置步骤见配置步骤。 (3)安装NVIDIA容器工具包 Configure the repository curl -fsSL https://nvidia.github.io/libnvidia-container/gpgkey | sudo gpg --dearmor -o /usr/share/keyrings/nvidia-container-toolkit-keyring.gpg \ && curl -s -L https://nvidia.github.io/libnvidia-container/stable/deb/nvidia-container-toolkit.list | \ sed 's#deb https://#deb [signed-by=/usr/share/keyrings/nvidia-container-toolkit-keyring.gpg] https://#g' | \ sudo tee /etc/apt/sources.list.d/nvidia-container-toolkit.list \ && \ sudo apt-get update Install the NVIDIA Container Toolkit packages sudo apt-get install -y nvidia-container-toolkit sudo systemctl restart docker Configure the container runtime sudo nvidia-ctk runtime configure --runtime=docker sudo systemctl restart docker Verify NVIDIA Container Toolkit docker run --rm --runtime=nvidia --gpus all ubuntu nvidia-smi 安装最新版本的 NVIDIA 容器工具包以获取安全补丁。 (4)容器部署 docker pull nvcr.io/nvidia/isaac-sim:5.0.0 拉取isaac sim容器。 然后以交互式bash会话运行isaac sim容器。 docker run --name isaac-sim --entrypoint bash -it --runtime=nvidia --gpus all -e "ACCEPT_EULA=Y" --rm --network=host \ -e "PRIVACY_CONSENT=Y" \ -v ~/docker/isaac-sim/cache/kit:/isaac-sim/kit/cache:rw \ -v ~/docker/isaac-sim/cache/ov:/root/.cache/ov:rw \ -v ~/docker/isaac-sim/cache/pip:/root/.cache/pip:rw \ -v ~/docker/isaac-sim/cache/glcache:/root/.cache/nvidia/GLCache:rw \ -v ~/docker/isaac-sim/cache/computecache:/root/.nv/ComputeCache:rw \ -v ~/docker/isaac-sim/logs:/root/.nvidia-omniverse/logs:rw \ -v ~/docker/isaac-sim/data:/root/.local/share/ov/data:rw \ -v ~/docker/isaac-sim/documents:/root/Documents:rw \ nvcr.io/nvidia/isaac-sim:5.0.0 使用 -e "ACCEPT_EULA=Y" 标志即表示您接受 NVIDIA Omniverse 许可协议中规定的镜像许可协议。 使用 -e "PRIVACY_CONSENT=Y" 标志即表示您同意数据收集与使用协议中的条款。不设置此标志即可选择退出数据收集。 使用-e "PRIVACY_USERID=\<emai\l>" 标志可选择性地设置用于标记会话日志。 最后以原生直播模式启动 isaac sim ./runheadless.sh -v 运行直播客户端前,必须确保 Isaac Sim 应用已加载就绪。Isaac Sim 可能需要几分钟才能完全加载。-v 标志用于在着色器缓存预热时显示额外日志。要确认这一点,请留意控制台或日志中的这一行:Isaac Sim Full Streaming App is loaded。 首次加载 Isaac Sim 时,着色器缓存需要较长时间。后续运行 Isaac Sim 会更快,因为着色器已被缓存,且容器运行时缓存会被挂载。 (5)安装isaac sim WebRTC流媒体客户端 见后续章节。输入运行 Isaac Sim 容器的机器或实例的 IP 地址,点击连接按钮开始实时流传输。 云部署 Isaac Sim以容器形式提供,可在本地运行,也可在配备NVIDIA RTX的亚马逊云服务、微软、谷歌云平台、腾讯云或阿里云上运行,并支持将应用程序直接流式传输到您的桌面。这种基于云的交付方式能为任何桌面系统提供最新的RTX图像处理能力与性能,无需本地配置NVIDIA RTX GPU。 根据选择的云服务提供商,提供以下可选方案。 NVIDIA Brev:NVIDIA Brev Instructions AWS:Amazon Web Instructions Azure:Microsoft Cloud Instructions GCP:Google Cloud Instructions Tencent:Tencent Cloud Instructions Alibaba:Alibaba Cloud Instructions Volcano Engine:Volcano Engine Instructions Remote:Remote Workstation Instructions 上述链接提供了云端部署指南,包含通过 SSIsaac Automator 是一款高级工具,可帮助将自定义 Isaac Sim 部署自动化至公有云平台。该工具支持通过 SSH、基于网页的 VNC 客户端以及远程桌面客户端访问 Isaac Sim 实例,兼容 AWS、Azure、GCP 和阿里云等主流云服务商。H 和远程桌面客户端访问实例的操作说明。 直播客户端 本节将介绍如何以无界面模式直播运行 Isaac Sim 实例。需要注意的是每个 Isaac Sim 实例同一时间只能采用一种直播方式。同一时间仅允许一个客户端访问单个 Isaac Sim 实例。要远程退出 Isaac Sim 应用程序:点击文件菜单,然后在流式传输的 Isaac Sim 应用中选择退出。接着关闭 Isaac Sim WebRTC 流媒体客户端应用。当 Isaac Sim 运行在 A100 GPU 上时不支持直播功能。直播需要 NVENC(NVIDIA 编码器)支持,而 A100 GPU 不包含该编码器。 Isaac Sim WebRTC流媒体客户端是推荐的远程查看工具,可让您在桌面或工作站以无需配置高性能GPU可以查看Isaac Sim画面。 (1)服务端的启动 要使用Isaac Sim WebRTC流媒体客户端,需要先在远程运行isaac Sim。 linux:cd ~/isaacsim && ./isaac-sim.streaming.sh windows:双击isaac-sim.streaming.bat Docker:./runheadless.sh PIP:isaacsim isaacsim.exp.full.streaming --no-window Python sample:./python.sh standalone_examples/api/isaacsim.simulation_app/livestream.py 要可以通过互联网连接远程实例运行isaac sim,需要添加以下标志:--/app/livestream/publicEndpointAddress= --/app/livestream/port=49100。如在docker容器示例中: PUBLIC_IP=$(curl -s ifconfig.me) && ./runheadless.sh --/app/livestream/publicEndpointAddress=$PUBLIC_IP --/app/livestream/port=49100 然后在 Isaac Sim WebRTC 流媒体客户端应用中使用相同的公共 IP。运行 Isaac Sim 的主机必须开放UDP port 47998和TCP port 49100。 确保 Isaac Sim 应用已加载就绪。首次启动时,Isaac Sim 可能需要数分钟才能完全加载完成。 为确认加载状态,请在终端/控制台输出或应用日志中查找以下信息。使用 PIP 或 Python Sample 运行时可能不会显示该行信息。Isaac Sim Full Streaming App is loaded. (2)客户端的启动 请根据您的平台,从最新发布版块下载 Isaac Sim WebRTC 流媒体客户端。 运行 Isaac Sim WebRTC 流媒体客户端应用程序。 使用默认的 127.0.0.1 IP 地址作为服务器,连接到本地 Isaac Sim 实例。点击"连接"。连接过程可能需要一些时间。连接成功后,您将在客户端窗口中看到 Isaac Sim 界面。 需要注意的是建议在与 Isaac Sim 无头实例相同的网络中使用 WebRTC 流媒体客户端。连接到同一网络中无头模式的 Isaac Sim 实例时,请将 127.0.0.1 替换为运行 Isaac Sim 的计算机 IP 地址。 linux系统:在终端中运行 chmod +x xx.AppImage 命令,使应用程序获得可执行权限。双击 AppImage 文件即可运行 Isaac Sim WebRTC 流媒体客户端。重要提示:在 Ubuntu 22.04 或更高版本上运行需安装 libfuse2。具体安装方法请参阅《安装 FUSE 2》指南。 windows:若在连接本地或远程 Isaac Sim 实例时遇到问题,请确保 Windows 防火墙允许列表中已添加/kit/kit.exe 及 Isaac Sim WebRTC 流媒体客户端应用。 macbook:打开 DMG 文件后,点击并拖拽 Isaac Sim WebRTC 流媒体客户端应用程序至"应用程序"文件夹图标完成安装。 要重新加载连接,请在视图菜单中点击“重新加载”。如果一段时间后出现空白屏幕,此操作可能会有所帮助。 Python环境安装 主要是在python虚拟环境中通过PIP安装Isaac Sim和使用isaac Sim默认python环境。这里就不展开了,具体参考链接:python环境安装 Isaac Sim 资源库 isaac Sim提供多种资源与机器人模型,助您构建虚拟世界。部分资源专为isaac Sim及机器人应用打造,另一些则适用于其他基于NVIDIA Omniverse的应用程序。默认提供的资源均可在Window > Browsers选项卡中找到。 内容浏览器集中管理所有isaac Sim资源与文件,包含下来全部资源清单,以及URDF文件、配置文件、策略二进制等。Window > Browsers > Content。 isaac Sim最新版本提供示例资源包可供下载。使用这些资源时,需将文件下载至本地磁盘或Nucleus服务器。下文中所有资源路径均默认相对于 persistent.isaac.asset_root.default 设置中的默认资源根目录。详见本地资源包章节。 首次加载资源时耗时较长:机器人模型可能需要数分钟加载,大型环境场景的加载时间可能长达十分钟以上 资源分类如下: 机器人资产 相机与深度传感器 非视觉传感器 道具 环境 精选资源 Neural Volume渲染 机器人 NVIDIA Isaac Sim 支持多种具有不同底盘、外形和功能的机器人。这些机器人可分为轮式机器人、全向移动机器人、四足机器人、机械臂和空中机器人(无人机),它们位于内容浏览器的 Isaac Sim/Robots 文件夹中。 (1)轮式机器人 Limo是NVIDIA Isaac Sim 支持集成 ROS 系统的 AgileX Limo 差速驱动底盘机器人。Robots/AgilexRobotics/Limo/limo.usd NVIDIA 卡特机器人专为导航相关应用提供差速移动底盘。新一代 Nova 卡特机器人基于 Nova Orin 计算与传感器平台打造。 NVIDIA Isaac Sim 支持 Clearpath 移动机器人,包括 Dingo 和 Jackal。Clearpath 机器人位于 Robots/Clearpath 中。 Evobot 是一款采用两轮驱动的自平衡机器人,专为抓取和运输物体设计。该机器人由德国多特蒙德弗劳恩霍夫研究所开发。 Forklift 叉车模型采用单枢轴轮和滚轮设计,通过连接至关节动作的棱柱关节来控制升降操作。 JetBot是开源 NVIDIA JetBot 人工智能机器人平台为创客、学生和爱好者提供了构建创意趣味 AI 应用所需的一切。 Idealworks iw.hub 是一款配备激光雷达和摄像头的移动底盘,搭载 NVIDIA AGX GPU 实现自主导航。该平台负载能力达 1000 公斤,最高行驶速度 2.2 米/秒。 iRobot 公司推出的 Create3 机器人是一款先进的差速驱动机器人,专为多种教育应用场景设计。其圆形底盘集成了多种传感器和先进控制功能,特别适合室内导航、环境建图等任务。NVIDIA Isaac Sim 中的 Create3 机器人配备了差速驱动系统和各类传感器,可实现高度逼真的仿真效果。Create 3 机器人可在 Robots/iRobot/Create3/create_3.usd - 基础版本中找到。已配置移动底盘物理系统。更多信息参阅 iRobot Create 3 。 Leatherback 是 NVIDIA 用于自动驾驶的研究平台。皮背甲机器人位于 Robots/NVIDIA/Leatherback/leatherback.usd (2)全向移动机器人 Kaya机器人是一个展示 Isaac 机器人引擎在 NVIDIA Jetson Nano™平台上运行能力与灵活性的演示平台。该平台采用 3D 打印部件和爱好者级组件设计,力求实现最大程度的可及性,并配备三轮全向驱动系统,使其能够朝任意方向移动。 Robots/NVIDIA/Kaya/kaya.usd :基础版本 Robots/NVIDIA/Kaya/kaya_ogn_gamepad.usd:基础版本,外加使用全向控制器实现的游戏手柄操控功能。 O3dyn 是由多特蒙德弗劳恩霍夫研究所开发的自主全向运输机器人。凭借其全向轮,该机器人可实现任意方向移动,并通过四个杠杆抓取托盘,进而抬升托盘进行运输。 Robots/Fraunhofer/O3dyn/o3dyn.usd: 基础版本。包含移动底盘、夹具与升降机构的物理绑定,以及传感器定位功能。 Robots/Fraunhofer/O3dyn/o3dyn_controller.usd :基础版本,外加使用全向控制器实现的游戏手柄操控功能。 (3)四足机器人 Ant蚂蚁是一种基础四足机器人,腿部采用旋转关节设计,其原型源自 OpenAI Gym 中的 Ant 机器人。 Robots/IsaacSim/Ant/ant.usd :基础版本。可通过菜单栏中 Create>Robots>Ant 选项创建。 Robots/IsaacSim/Ant/ant_instanceable.usd :可实例化版本,专为强化学习场景配置以创建多个高效克隆体。 ANYmal 机器人是由 ANYbotics 开发的自主四足机器人。Isaac Sim 支持 B、C、D 三种型号。 Boston Dynamics Spot 波士顿动力 Spot 机器人位于 Robots/BostonDynamics/spot Unitree Quadruped Robots 宇树四足机器人A1、B2、Go1 和 Go2 是 Unitree Robotics 研发的四足机器人,在 Isaac Sim 中进行仿真。四足示例中使用的是 A1 型号。 关于四组机器人控制示例,请参阅:Isaac Sim 中的强化学习策略示例 (4)机械臂机器人 Denso Cobotta 包含以下 Denso 型号:Cobotta Pro 900、Cobotta Pro 1300。位于 Robots/Denso/Cobotta。 Fanuc CRX10iA/L 是一款 6 轴机器人,有效载荷为 10 公斤。 Festo费斯托协作机器人是一款六轴气动机械臂。 Flexiv Rizon 4 是一款 7 轴自适应机械臂。 RobotStudio是lerobot机械臂,包含以下 RobotStudio 模型:SO-100、SO-101。RobotStudio 机器人位于 Robots/RobotStudio。 太多了,只列出部分。 (5)空中机器人 Crazyflie 2.X 微型四轴飞行器机器人 Ingenuity火星直升机"机智号" (6)人形机器人 Fourier Intelligence GR1 傅里叶智能 GR1 Unitree Humanoids 宇树人形机器人,位于 Robots/Unitree Xiao Peng PX5 小鹏 PX5机器人位于 Robots/XiaoPeng/PX5 (7)移动式机械臂 Clearpath Ridgeback提供两种 Clearpath Ridgeback 型号配置:一种配备 Emika Franka Panda 机械臂,另一种配备 Universal Robots UR5 机械臂。位于 Robots>Clearpath 目录下。 Boston Dynamics Spot 波士顿动力 Spot 机器人,带机械臂的 Spot 机器人位于 Robots>BostonDynamics>spot 路径下 相机与深度传感器 Isaac Sim 支持相机和深度传感器,其数字孪生体可在内容浏览器中找到,位于 Isaac Sim/Sensors 目录下,并按制造商分类存放于子文件夹中。这里就不过多阐述。 非视觉传感器 Isaac Sim 模拟了多种类型的非视觉传感器模型,其数字孪生体可在内容浏览器的 Isaac Sim/Sensors 路径下找到,并按制造商分类存放于子文件夹中。 部分非视觉传感器类型尚未提供数字孪生体。有关这些传感器的详细信息(包括如何通过图形界面创建它们),请点击下方链接: 接触传感器 惯性测量单元传感器 光束传感器 激光雷达 雷达 道具 道具主要是一些角色人物如警察、医生、工人,以及杂项资产。 环境资产 环境资产提供如网格、房间、仓库、医院、办公室、赛道、小型仓库数字孪生 (1)简单网格 这个简易环境包含一块带有网格纹理的平坦地面和围边。系统提供了三种配置:前两种为直角转角,第三种则为圆角设计。 (2)简单房间 包含一张桌子的简易房间 在内容浏览器中搜索 simple_room.usd 或通过创建菜单:Create>Environments>Simple Room (3)仓库 一个包含货架及可放置物品的仓库环境。提供四种配置方案: (4)医院 医院环境,包含多个房间和空间。 (5)办公室 一个办公环境,包含多个房间和开放式平面布局。 (6)赛道 地面上勾勒出的 Jetracer 赛道轮廓。 (7)小型仓库数字孪生 一个小型仓库的数字孪生,可以使用。 精选资产 Nova Carter 搭载 Nova Orin™传感器与计算架构,是一套完整的机器人开发平台,可加速新一代自主移动机器人(AMR)的开发和部署。 Nova Carter 目前作为 Isaac AMR 和 Isaac ROS 软件的双重参考平台,支持真实场景与仿真环境下的开发工作。用户可通过赛格威机器人公司购买 Nova Carter 机器人。 关于功能完整的 Nova Carter Isaac Sim 资产详情,请参阅Nova Carter 文档页面。 注意Nova Carter 机器人在首次加载时可能需要数分钟时间。 Neural Volume渲染 NuRec(神经重建)技术能够利用源自真实世界图像的神经体积数据,在 Omniverse 中进行场景渲染。这些基于 3D 高斯模型的场景可作为标准 USD 资产加载至 Isaac Sim,用于可视化与仿真。 有关 NuRec 在 Omniverse 中的详细工作原理(包括数据准备、渲染设置及已知限制),请参阅NuRec 文档。要生成兼容场景,可使用开源项目3DGruT——该项目提供从图像集合训练 3D 高斯模型的工具,并能导出适用于 Omniverse 应用的 USDZ 格式数据。 示例展示了如何将 NuRec 场景加载到 Isaac Sim 中并运行模拟。该代码片段遍历提供的示例,首先加载指定的舞台,随后加载 carter 导航资源并设置起始位置。接着检查是否需要在生成位置创建碰撞地平面,若需要,则创建一个应用了碰撞 API 的平面基元。然后设置 carter 导航目标基元位置,并运行指定步数的模拟。在模拟过程中,轮式机器人将朝目标位置行进。 import asyncio import os import omni.kit.commands import omni.kit.app import omni.usd import omni.timeline from isaacsim.storage.native import get_assets_root_path_async from isaacsim.core.utils.stage import add_reference_to_stage from pxr import PhysxSchema, UsdGeom, UsdPhysics # User path of the HF NuRec dataset USER_PATH = "/home/user/PhysicalAI-Robotics-NuRec" # Paths for loading and placing the Nova Carter navigation asset and its target. NOVA_CARTER_NAV_URL = "/Isaac/Samples/Replicator/OmniGraph/nova_carter_nav_only.usd" NOVA_CARTER_NAV_USD_PATH = "/World/NovaCarterNav" NOVA_CARTER_NAV_TARGET_PATH = f"{NOVA_CARTER_NAV_USD_PATH}/targetXform" # Scenarios for testing navigation in the environments EXAMPLE_CONFIGS = [ { "name": "Voyager Cafe", "stage_url": f"{USER_PATH}/nova_carter-cafe/stage.usdz", "nav_start_loc": (0, 0, 0), "nav_relative_target_loc": (-3, -1.5, 0), "create_collision_ground_plane": False, "num_simulation_steps": 500, }, { "name": "Galileo Lab", "stage_url": f"{USER_PATH}/nova_carter-galileo/stage.usdz", "nav_start_loc": (3.5, 2.5, 0), "nav_relative_target_loc": (4, 0, 0), "create_collision_ground_plane": False, "num_simulation_steps": 500, }, { "name": "Wormhole", "stage_url": f"{USER_PATH}/nova_carter-wormhole/stage.usdz", "nav_start_loc": (0, 0, 0), "nav_relative_target_loc": (5, 0, 0), "create_collision_ground_plane": False, "num_simulation_steps": 500, }, { "name": "ZH Lounge", "stage_url": f"{USER_PATH}/zh_lounge/usd/zh_lounge.usda", "nav_start_loc": (-1.5, -3, -1.6), "nav_relative_target_loc": (-0.5, 5, -1.6), "create_collision_ground_plane": True, "num_simulation_steps": 500, }, ] async def run_example_async(example_config): example_name = example_config.get("name") print(f"Running example: '{example_name}'") # Open the stage stage_url = example_config.get("stage_url") if not stage_url: print(f"Stage URL not provided, exiting") return if not os.path.exists(stage_url): print(f"Stage URL does not exist: '{stage_url}', exiting") return print(f"Opening stage: '{stage_url}'") await omni.usd.get_context().open_stage_async(stage_url) stage = omni.usd.get_context().get_stage() # Make sure the physics scene is set to synchronous for the navigation to work for prim in stage.Traverse(): if prim.IsA(UsdPhysics.Scene): physx_scene = PhysxSchema.PhysxSceneAPI.Apply(prim) physx_scene.GetUpdateTypeAttr().Set("Synchronous") break # Load the carter navigation asset assets_root_path = await get_assets_root_path_async() carter_nav_path = assets_root_path + NOVA_CARTER_NAV_URL print(f"Loading carter nova asset: '{carter_nav_path}'") carter_nav_prim = add_reference_to_stage(usd_path=carter_nav_path, prim_path=NOVA_CARTER_NAV_USD_PATH) # Set the carter navigation start location nav_start_loc = example_config.get("nav_start_loc") if not nav_start_loc: print(f"Navigation start location not provided, exiting") return print(f"Setting carter navigation start location to: {nav_start_loc}") if not carter_nav_prim.GetAttribute("xformOp:translate"): UsdGeom.Xformable(carter_nav_prim).AddTranslateOp() carter_nav_prim.GetAttribute("xformOp:translate").Set(nav_start_loc) # Check if a collision ground plane needs to be created at the spawn location if example_config.get("create_collision_ground_plane"): plane_path = "/World/CollisionPlane" print(f"Creating collision ground plane {plane_path} at {nav_start_loc}") omni.kit.commands.execute("CreateMeshPrimWithDefaultXform", prim_path=plane_path, prim_type="Plane") plane_prim = stage.GetPrimAtPath(plane_path) plane_prim.GetAttribute("xformOp:scale").Set((10, 10, 1)) plane_prim.GetAttribute("xformOp:translate").Set(nav_start_loc) if not plane_prim.HasAPI(UsdPhysics.CollisionAPI): collision_api = UsdPhysics.CollisionAPI.Apply(plane_prim) else: collision_api = UsdPhysics.CollisionAPI(plane_prim) collision_api.CreateCollisionEnabledAttr(True) plane_prim.GetAttribute("visibility").Set("invisible") # Set the carter navigation target prim location nav_relative_target_loc = example_config.get("nav_relative_target_loc") if not nav_relative_target_loc: print(f"Navigation relative target location not provided, exiting") return print(f"Setting carter navigation target location to: {nav_relative_target_loc}") carter_navigation_target_prim = stage.GetPrimAtPath(NOVA_CARTER_NAV_TARGET_PATH) if not carter_navigation_target_prim.IsValid(): print(f"Carter navigation target prim not found at path: '{NOVA_CARTER_NAV_TARGET_PATH}', exiting") return if not carter_navigation_target_prim.GetAttribute("xformOp:translate"): UsdGeom.Xformable(carter_navigation_target_prim).AddTranslateOp() carter_navigation_target_prim.GetAttribute("xformOp:translate").Set(nav_relative_target_loc) # Run the simulation for the given number of steps num_simulation_steps = example_config.get("num_simulation_steps") if not num_simulation_steps: print(f"Number of simulation steps not provided, exiting") return print(f"Running {num_simulation_steps} simulation steps") timeline = omni.timeline.get_timeline_interface() timeline.play() for i in range(num_simulation_steps): if i % 10 == 0: print(f"Step {i}, time: {timeline.get_current_time():.4f}") await omni.kit.app.get_app().next_update_async() print(f"Simulation complete, pausing timeline") timeline.pause() async def run_examples_async(): for example_config in EXAMPLE_CONFIGS: await run_example_async(example_config) asyncio.ensure_future(run_examples_async()) 从 Hugging Face 下载 NVIDIA NuRec 数据集。更新脚本中的 USER_PATH 变量: USER_PATH = "/home/user/PhysicalAI-Robotics-NuRec"。 本文主要来自Isaac Sim Documentation V5.0.0的翻译。 -
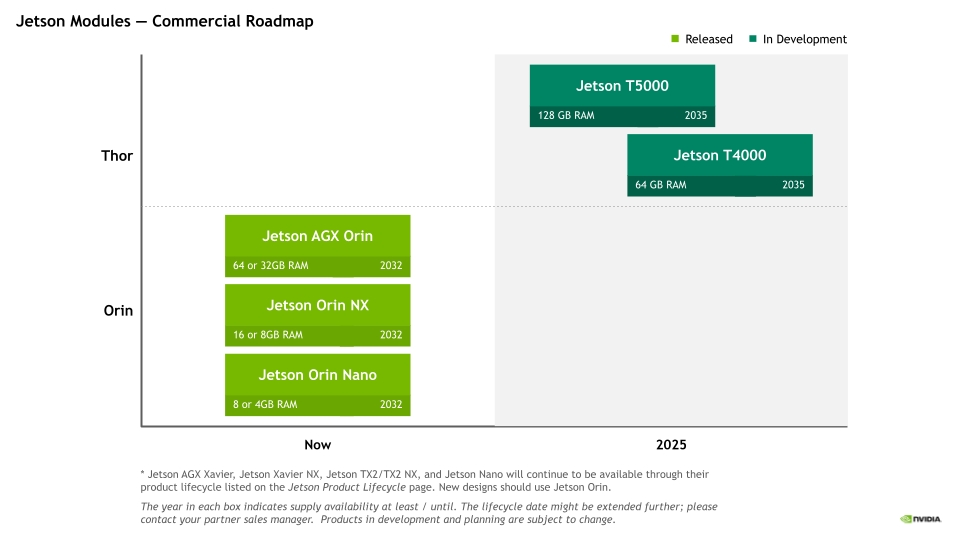
NVIDIA Jetson平台简介:机器人和边缘AI
简介 NVIDIA Jetson平台提供用于开发和部署AI赋能机器人、无人机、IVA(Intelligent Video Analytics,智能视频)应用和自主机器的工具。在边缘生成式AI、NVIDIA Metropolis和Isaac平台支持下,Jetson提供可拓展得软件、现代AI堆栈、灵活的微服务和API、生成就绪型ROS软件包以及特定于应用程序的AI工作流。 Jetson 硬件Roadmap,分为商业方向和工业方向。 上图是商业硬件roadmap,主要分为orin(欧林)和thor(雷神)两个系列。 而工业方向roadmap主要是entry、mainstream、perfromance三个方向。 在软件方面,jetson提供JetPack软件包,截止目前最新的发布版本是JetPack 7.0,主要是基于ubuntu 24.04,集成了CUDA 13.0以及holoscan sensor bride支持。 硬件 NVIDIA Jetson 模组可提供适合各种性能水平和价位的加速计算功能,从而能够满足各种自主应用的需求。从制造业到建筑业,从医疗健康到物流行业,Jetson 平台都能提供出色的性能、卓越的能效和无比轻松的开发体验。下面是jetson系列提供的模组规格简要对比。 上面是NVIDIAjetson系列的模组从最小0.5TFLOPS算力到最大2070 TOPS算力的平台矩阵。 Nano:四核A57@1.43G CPU+128核Maxwell架构GPU+4GB LPDDR内存,可提供472 FGLOP的AI算力;并行运行多个神经网络并同时处理多个高分辨率传感器,其功耗仅需5~10W;应用在网络硬盘录像机(NVR)、家用机器人以及具备全面分析功能的智能网关上面。 TX2:双核NVIDIA Denver™@1.95G+四核Arm® Cortex®-A57@1.92G CPU+256核 Pascal GPU+4GB/8GB LPDDR内存,可提供1.3TFLOPS的AI算力;计算性能翻倍,功耗仅7.5W。可应用在工厂机器人、商用无人机、便携式医疗设备和企业协作设备中。 Xavier NX:6核NVIDIA Carmel ARM®v8.2 64 位 CPU + 48 个 Tensor Core 的 384 核 NVIDIA Volta™ GPU+8/16GB LPDDR4x内存;可提供14TOPS+功耗10W~21TOPS+功耗20W的AI算力;应用在 适用于无人机、便携式医疗设备、小型商业机器人、智能摄像头、高分辨率传感器、自动光学检测、智能工厂和其他 IoT 嵌入式系统等高性能 AI 系统。 AGX Xavier:8 核 NVIDIA Carmel Armv8.2 64 位 CPU+512 个 NVIDIA CUDA Core 和 64 个 Tensor Core Volta 架构GPU+32/64GB内存,提供32TOPS的AI算力,功耗在10W~40W;非常适用于配送和物流机器人、工厂系统和大型工业UAV等自主机器。 Orin Nano、NX、AGX:6\~12核 Arm® Cortex® A78AE v8.2@1.7G\~2.2G +(32\~64)x (1024\~2048)核Ampere 架构 GPU+4G\~64G LPDDR5内存;功耗满足7\~60W,提供算力34 TOPS\~275 TOPS的AI算力;Orin系列是包含7个相同架构的模组其性能是上一代AI推理的8倍并支持高速接口;强大的软件堆栈包含预训练的 AI 模型、参考 AI 工作流和垂直应用框架,可加速生成性 AI 的端到端开发,以及边缘 AI 和机器人应用。 Thor:12\~14核 Arm® Neoverse®-V3AE 64 位 CPU@2.6G+(64\~96)X(1536\~2560)核Blackwell 架构 GPU+128G LPDDR5X内存,提供1200~2070TFLOPS(FP4)算力;功耗在40~75W,与AGX Orin相比,Jetson Thor 系列模组的 AI 计算性能提高至 7.5 倍以上,能效提高至 3.5 倍。应用在人形机器人、空间智能、多传感器处理、生成式AI等多个场景。 软件 NVIDIA Jetson软件是永远边缘构建、部署和扩展人形机器人及生成式AI应用的旗舰平台。它支持全系列Jetson模块,为从原型开发到量产提供统一且可扩展的基础。NVIDIA JetPack SDK赋能实时传感处理、多摄像头追踪,以及如操作和导航等先进机器人功能,集成于强大的AI生态之中。开发者可借助诸如NVIDIA Holoscan(传感器流式处理)和Metropolis VSS(视频分析)等集成框架。通过NVIDIA Isaac机器人工作流程,包括想NVIDIA GROOT N1等基础生成式AI模型,Jetson软件为机器人实现快速、精准、变革性的AI赋能和规模化部署提供支持。 JetPack SDK:是一套完整的软件套件,用于NVIDIA Jetson平台上开发和部署AI驱动的边缘应用。 Holoscan传感器桥接器:将边缘传感器连接到AI工作流,以实现实时、高性能的传感器数据处理。 Jetson AI Lab:由NVIDIA工具和社区项目提供支持,激发机器人和生成式AI领域的创新和动手探索。 NVIDIA Isaac:提供NVIDIA CUDA加速库、框架和AI模型,用一个构建自主机器人,包括ARM、机械臂和人形机器人。 NVIDIA Metropolis:为智慧城市、工业和零售业开发和部署视觉AI应用,并在边缘进行实时视频分析。 JetPack SDK JetPack是NVIDIA Jetson平台官方软件套件,涵盖丰富的工具和库,可用于大招AI赋能边缘应用。目前最新的版本是JetPack7,采用Linux kernel 6.8及ubuntu 24.04 LTS,模块化云原生架构,结合最新的NVIDIA计算堆栈,无缝衔接NVIDIA AI工作流。 JetPack组件由AI计算堆栈、AI框架、Linux组件几个部分组成。 AI计算堆栈:由CUDA、cuDNN、TensorRT组成;用于提供硬件GPU的加速底层接口;CUDA提供NVIDIA GPU 上编写和运行通用计算程序的能力;cuDNN在CUDA之上的深度神经网络算子库,提供高度优化的深度学习核心算子(卷积、池化、激活函数、RNN/LSTM、注意力等)。Pytorch/TensorFlow调用cuDNN中的Conv2d、RNN等。TensorRT推理优化器,只负责推理不负责训练,把训练好的模型转换成高效的 GPU 可执行引擎底层依赖CUDA/cuDNN。与pytorch、TensorFlow不同其即是训练+推理框架。但相对pytorch、TensorFlow的推理,TensorRT性能效率更高。 AI框架:由pytorch、vLLM、SGLang、Triton推理服务器等部分组成。vLLM是便捷、快速的大型语言模型推理与服务库,SGLang 是专为大语言模型及视觉语言模型打造的高效推理框架。 Linux组件:主要是基础系统组件,基于ubuntu系统构建,提供刷机、安全、OTA、图形库(OpenGL、Vulkan、EGL等)、多媒体API、计算机视觉库(OpenCV、VisionWorks)等。 其他组件:Jetson平台服务、云原生设计、Nsight开发工具组成;平台服务提供预构建和可定制的云原生软件服务;云原生设计师提供容器化开发、kubernetes和微服务;Nsight提供强大的分析、调试、性能分析功能,在AI、图形和计算工作负载中优化GPU加速应用。 在JetPack SDK上各种应用SDK,如提供NVIDIA DeepStream SDK、NVIDIA Isaac ROS、NVIDIA Holoscan SDK。 Metropolis VIDIA Metropolis 是一个视觉 AI 应用平台和合作伙伴生态系统,可简化从边缘到云端的视觉 AI 智能体的开发、部署和可扩展性。可以做自动化视觉检查、智能交通系统、工业自动化、智能零售商店等等。 模型:可访问各种先进的AI模型,构建视觉AI应用,支持VLM等;提供TAO工具套件。对模型训练、适应和优化上手简单,不需要专业的AI知识或大型训练数据集,使用自己的数据微调即可完成。 工具:提供AI智能体Blueprints,借助大模型构建智能体,分析、解释和处理大量视频数据,以提供关键见解,帮助各行各业优化流程、提高安全性并降低成本。提供NVIDIA NIM一套易于使用的推理微服务,NIM 支持各种 AI 模型 (包括基础模型、LLM、VLM 等) ,可确保使用行业标准 API 在本地或云端进行无缝、可扩展的 AI 推理。提供DeepStream SDK,是基于 GStreamer 的完整流分析工具包。 数据:Omniverse集成 OpenUSDNVIDIA RTX™ 渲染技术,以及 物理 AI 集成到现有软件工具和仿真工作流中进行开发和测试 。NVIDIA Cosmos™ 是一个先进的生成式AI平台世界基础模型( WFM) 、高级标记器、护栏以及加速数据处理和管护流程,旨在加速物理 AI系统。NVIDIA Isaac SIM开发者在物理精准的虚拟环境中生成合成图像和视频数据,以训练自定义视觉AI模型。 Isaac NVIDIA Isaac AI机器人开发平台有NVIDIA CUDA加速库、应用框架和AI模型组成,可加速自主移动机器人、手臂和操作器以及人形机器人等。 NVIDIA Robotis提供了全栈、加速库和优化的AI模型,能够高效开发、训练、仿真、部署机器人系统。 Isaac ROS:机器人操作系统,是基于开源ROS2构建,包含了NVIDIA CUDA加速计算包的集合,便于简化和加速高级AI机器人应用开发。 Isaac Manipulator:基于Isaac ROS构建,支持开发AI驱动的机械臂,这些机械臂可以无缝感知和理解环境并与环境进行交互。 Isaac Perceptor:基于Isaac ROS构建,支持开发先进的自主移动机器人,能够在仓库货工厂等非结构化环境中进行感知和定位。 Isaac GR00T:用于通用机器人基础模型和数据流水线,以加速人形机器人的开发。 还提供了基于物理的虚拟环境中设计、仿真、测试和训练的框架。NVIDIA Isaac Sim和NVIDIA Isaac Lab。 NVIDIA Isaac Sim:是一款基于 NVIDIA Omniverse 构建的开源参考应用,使开发者能够在基于物理的虚拟环境中模拟和测试 AI 驱动的机器人开发解决方案。 NVIDIA Isaac Lab:Isaac Lab 基于 NVIDIA Isaac Sim™ 开发,使用 NVIDIA®PhysX® 以及基于物理性质的 NVIDIA RTX™ 渲染提供高保真物理仿真。 Holoscan SDK NVIDIA Holoscan 将传感器数据传输到 GPU 进行实时推理,从而加速边缘 AI 开发。 Holoscan 传感器桥接器:可在高吞吐量传感器数据与 GPU 之间提供关键链接,从而无缝集成异构传感器数据。它可标准化并管理从各种传感器接口 (如摄像头输入、超声波或内窥镜视频) 中的数据提取,确保以低延迟、同步和可靠的方式传输数据,从而实现实时 AI 处理。 NVIDIA IGX ORIN:是一个结合了企业级硬件、软件和支持的工业级平台,可在生产就绪型硬件上进行部署。虽然 Holoscan SDK 可在您的目标设备上灵活部署,但 IGX 使公司能够专注于应用开发,并更快地实现 AI 的优势。 Jetson AI Lab Jetson AI Lab 由 NVIDIA 工具和社区项目提供支持,其提供了各种大模型的快速部署示例,如大语言模型LLM/SLM、视觉语言大模型VLM、Web UI等等。 如上图,如果要运行一个模型,就可以通过如上图示例直接获取到运行命令,还可以调整参数。更详细的教程参考:https://www.jetson-ai-lab.com/tutorial-intro.html 参考:https://www.nvidia.cn/autonomous-machines/ -
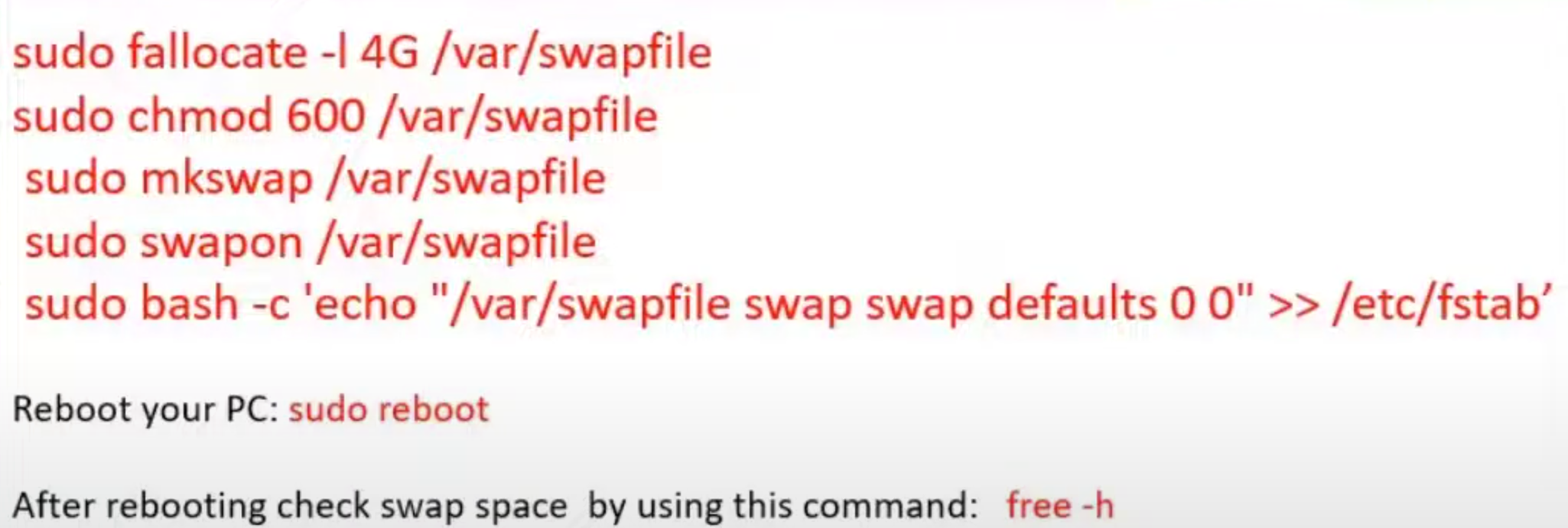
Jetson nano平台随记
环境准备 烧录镜像 下载NVIDIA jetson nano镜像,其镜像是基于ubuntu18.04修改。使用开源的balenaEtcher烧录器写到SD卡上,然后插卡启动 网络准备 买一个无线网卡然后安装好驱动配置好wifi连接。 远程访问 方法1: 在nano上安装xrdp的方式,window就可以远程桌面访问。 方法2:在nano上安装VNC,远程访问设备需要下载VNC客户端,支持ubuntu系统。 pyhton独立环境 类型conda activate的环境 sudo apt-get install python3-pip pip3 install virturalenv 创建一个环境 python3 -m virtualenv -p python3 env --system-site-packages 激活环境 source env/bin/activate 图像和视频 主要是https://github.com/thehapyone/NanoCamera 安装opencv 创建一个swap空间,否则内存可能不够。 在安装opencv前,还要准备一下环境 使用wget下载opencv的包。 wget -O opencv_contrib.zip https://github.com/openc/opencv_corntrib/archive/4.5.1.1.zip 使用cmake进行编译。 使用jtop可以查看系统统计信息,前提是要按照pip install -U jeston-stats 硬件接上CSI的摄像头,接上之后可以在/dev/videox 看到节点。可以使用下面的命令测试就可以看到图像。 nvgstcaptrue-1.0 --orientation=2 --cap-dev-node=1指定节点如/dev/video1 读取显示 import cv2 img = cv2.imread('/assets/a.jpg') cv2.imshow("Output",img) cv2.waitkey(0) 对于平台CSI摄像头需要import nanocamera import nanocamera as nano camera = nano.Camera(flip=2, width=640,height=480,fps=30) -

从零实现 Transformer:中英文翻译实例
概述 在http://www.laumy.tech/2458.html#h37章节中,介绍了transformer的原理,本章用pytorch来实现一个将"我有一个苹果"翻译为英文"I have an apple"的模型,直观体会transformer原理实现。 接下来先上图看看整体的代码流程。 推理 训练 模型 编解码器 到这里就涵盖了整个transformer模型翻译的例子了,下面的章节只是对图中的代码进行展开说明,如果不想陷入细节,可以直接跳转到最后一节获取源码运行实验一下。 数据预处理 数据准备 (1) 准备原始文本对 既然要做翻译那得先有数据用于模型训练,因此需要先准备原始的中文->英文的文本对,下面是使用python列表(List)准备中英匹配语料,List中包含的是元组(Tuple)。 pairs = [ ("我 有 一个 苹果", "i have an apple"), ("我 有 一本 书", "i have a book"), ("你 有 一个 苹果", "you have an apple"), ("他 有 一个 苹果", "he has an apple"), ("她 有 一个 苹果", "she has an apple"), ("我们 有 一个 苹果", "we have an apple"), ("我 喜欢 苹果", "i like apples"), ("我 吃 苹果", "i eat apples"), ("你 喜欢 书", "you like books"), ("我 喜欢 书", "i like books"), ("我 有 两个 苹果", "i have two apples"), ("我 有 红色 苹果", "i have red apples"), ] 为了方便,在构建原始文本对时,中英文的分词就以空格划分,这样接下来就可以根据空格来进行构建词表。 (2)构建词表 因为神经网络不能直接处理文本,模型只能处理数字,比如不能直接处理"我"、"有","I"等中英文词,对于计算机来讲都是数字,所以需要把文字转换为对应的映射表。 所以词表就是一个"字典",把每个词映射到一个唯一的数字ID上,所有的文本都需要转换为数字序列。 如下示例,中英文的编号。 # 中文词表示例 SRC_STOI = { "我": 1, "有": 2, "一个": 3, "苹果": 4, "书": 5, "喜欢": 6, # ... 更多词 } # 英文词表示例 TGT_STOI = { "i": 1, "have": 2, "an": 3, "apple": 4, "a": 5, "book": 6, # ... 更多词 } 如何构建词表了。既然中文、英文都需要各自编号,那么得先把此前准备的原始文本队中文、英文各自拆出来,然后我们使用python的set集合,将中文、英文分别添加到set集合中,使用set集合的好处是可以自动去重,添加了重复元素,set就不会添加,这样就得到了各自的中文、英文词表。最后再对这些词表进行依次编号即可。 下面就看看使用python代码怎么实现,首先是将原始文本对拆解,把中文放一起,英文放一起。 src_texts = [p[0] for p in pairs] tgt_texts = [p[1] for p in pairs] print(src_texts) print(tgt_texts) src_texts ['我 有 一个 苹果', '我 有 一本 书', '你 有 一个 苹果', '他 有 一个 苹果', '她 有 一个 苹果', '我们 有 一个 苹果', '我 喜欢 苹果', '我 吃 苹果', '你 喜欢 书', '我 喜欢 书', '我 有 两个 苹果', '我 有 红色 苹果'] tgt_texts ['i have an apple', 'i have a book', 'you have an apple', 'he has an apple', 'she has an apple', 'we have an apple', 'i like apples', 'i eat apples', 'you like books', 'i like books', 'i have two apples', 'i have red apples'] 接下来实现一个build_vocab函数,主要的思路就是句子先按照空格进行分好词,接着将所有词添加到set集合中,set集合会自动去重,这里需要注意的时,需要再加上3个特殊的词,分别是pad、bos、eos分别表示填充、开始、结束。填充是因为输入句子是不定长的,但是对于transformer来说所有的输入矩阵处理都是固定长度,所以不够的需要补齐,而bos和eos是用于transformer解码的,便于开始和结束翻译过程,最后构建好词表后就按照词表中进行变化,3个特殊词分为为1、2、3其他的词依次编号。 def build_vocab(examples: List[str]): """构建词表(字符串→索引 与 索引→字符串) - 输入示例为用空格分词后的句子列表 - 加入特殊符号 `<pad>`, `<bos>`, `<eos>` 并将其它 token 排序,保证可复现 返回: stoi: dict[token->id] itos: List[id->token] """ tokens = set() # 建立一个集合,用于存储所有的词表(不重复的词) for s in examples: # 依次遍历获得每个句子 for t in s.split(): # 通过空格划分,依次遍历句子中的每个词, tokens.add(t.lower()) # 将词添加到set中,这里为了方便统一转换小写 itos = ["<pad>", "<bos>", "<eos>"] + sorted(tokens) # 加入3个特殊的词,同时对set中的词进行排序。 stoi = {t: i for i, t in enumerate(itos)} # 对词表中的词按照顺序依次编号 return stoi, itos SRC_STOI, SRC_ITOS = build_vocab(src_texts) TGT_STOI, TGT_ITOS = build_vocab(tgt_texts) build_vocab最终返回是一个字典和列表,字典是词:编号的映射,列表是存放的是词表。列表是按照编号顺序依次排布,这样我们可以通过编号定位到时那个词。 为什么要一个字典和列表了?因为transformer输入是词->编号(转换为编码数字给计算机处理),输出是编号->词过程(转化为句子给人看)。通过字典我们可以查询词对应的编号[key:value],而通过列表的索引(编号)我们可以查询到对应的词。 中文和英文分别各自对应一个字典和词表。 SRC_STOI {'<pad>': 0, '<bos>': 1, '<eos>': 2, '一个': 3, '一本': 4, '两个': 5, '书': 6, '他': 7, '你': 8, '吃': 9, '喜欢': 10, '她': 11, '我': 12, '我们': 13, '有': 14, '红色': 15, '苹果': 16} SRC_ITOS ['<pad>', '<bos>', '<eos>', '一个', '一本', '两个', '书', '他', '你', '吃', '喜欢', '她', '我', '我们', '有', '红色', '苹果'] TGT_STOI {'<pad>': 0, '<bos>': 1, '<eos>': 2, 'a': 3, 'an': 4, 'apple': 5, 'apples': 6, 'book': 7, 'books': 8, 'eat': 9, 'has': 10, 'have': 11, 'he': 12, 'i': 13, 'like': 14, 'red': 15, 'she': 16, 'two': 17, 'we': 18, 'you': 19} TGT_ITOS ['<pad>', '<bos>', '<eos>', 'a', 'an', 'apple', 'apples', 'book', 'books', 'eat', 'has', 'have', 'he', 'i', 'like', 'red', 'she', 'two', 'we', 'you'] 这样我们就给中文和英文的所有词都编好号了,同时通过列表也可以通过编号查询到词。 数据加载器 在pytorch中模型训练那必然少不了DataLoader和Dataset,关于这两个类的介绍在http://www.laumy.tech/2491.html#h23中有简要说明,这里就不阐述了。注意本小节说明的数据的批量处理都适用于训练准备,主要是实现Dataset和Dataloader用于pytorch模型的训练,如果只是推理则是不需要的。 (1)Dataset继承类实现 首先要实现DataLoader中关键的输入类Dataset继承类,用于产出“单个样本”,怎么按索引取到一个样本,以及总共有多少个样本。每个样本是中文句子->英文句子。样本集为此前定义pairs,但是要把pairs中句子转换为编号,词表在前面我们已经构建好了,直接查询就行,那这里我们定义一个Example用于定义样本,src是中文句子的编号列表,tgt是对于英文句子的编号列表。 @dataclass class Example: """单条并行样本 - src: 源语言索引序列(不含 BOS/EOS) - tgt: 目标语言索引序列(含 BOS/EOS) """ src: List[int] tgt: List[int] 接下来就是实现Dataset的继承类ToyDataset,返回有多少个样本,以及通过编号获取指定的样本。 class ToyDataset(Dataset): """语料数据集,用于快速过拟合演示。""" def __init__(self, pairs: List[Tuple[str, str]]): self.data = [Example(encode_src(s), encode_tgt(t)) for s, t in pairs] def __len__(self): return len(self.data) def __getitem__(self, idx): return self.data[idx] 需要把pairs句子中词列表编码为数字列表,这里实现encode_src用于将输入(即pairs中的中文)编号为列表,再实现encode_tgt将输出(即pairs中的英文)编号为列表。使用for列表推导式从pairs列表中获取到s(中文句子)和t(英文句子)然后传入encode_src和encoder_tgt进而构建一个新的列表元素Example。这样就组建样本的self.data的样本列表,元素为Example类型,可以通过idx获取到指定的样本。 def encode_src(s: str) -> List[int]: """将原语句(已空格分词)编码为索引序列(不含 BOS/EOS)。""" return [SRC_STOI[w.lower()] for w in s.split()] def encode_tgt(s: str) -> List[int]: """将目标语句编码为索引序列,并在首尾添加 BOS/EOS。""" return [BOS_IDX] + [TGT_STOI[w.lower()] for w in s.split()] + [EOS_IDX] 上面就是输入句子编码为编号向量的实现了,也很简单,通过此前构建的词表字典,通过词就可以搜索到对应编号了。这里需要注意的是编码的源句子(输入)是没有包含BOS和EOS的,因为transformer的编码器不需要BOS和EOS,而编码的目标句子(输出)需要在句子前加上BOS,句子结尾加上EOS,因为transformer的解码器输入需要通过BOS来翻译第一个词,通过EOS来结束一个句子的翻译,要是不明白为什么了可以看看前面transformer原理的文章。 (2)Dataload DataLoader 负责“成批取样”,模型训练输入数据不是一个样本一个样本的送入训练,而是按照批次(多个样本合成一个批次)进行训练,这样训练效率才高。DataLoader决定批大小、是否打乱、多进程加载,返回的是一个可迭代的对象。 DataLoader重点是要实现 collate_fn回调,也就是怎么把一个批里的样本“拼起来”。 loader = DataLoader(dataset, batch_size=8, shuffle=True, collate_fn=collate_fn) 训练transformer,准备数据。我们的目的是要能够返回批量数据,批量数据也有好几个类型。 输入给encoder批量数据:输入矩阵类型(B,S),包含补齐的padding。 输入给decoder的批量数据:输入给decoder的矩阵类型(B,T),包含BOS以及右对齐的padding。不能加EOS,因为EOS是预测的结果,防止模型训练作弊。 decoder输出的批量数据:解码器的监督目标,主要用于预测数据与实际的结果比较计算损失,矩阵类型(B,T),不含BOS但是包含EOS。 encoder输入的pad掩码数据:因为输入给encoder的数据有padding,所以要告诉transformer哪些做了补齐,后续计算的时候要处理。 decoder输入的pad掩码数据:同上。 def collate_fn(batch: List[Example]): """将一个 batch 的样本对齐为等长张量,并构造 teacher forcing 所需的输入/输出。 返回: - src: (B,S) 源序列,已 padding - tgt_in: (B,T) 解码器输入(含 BOS,右对齐 padding) - tgt_out: (B,T) 解码器监督目标(对 tgt_in 右移一位,含 EOS) - src_pad_mask: (B,S) 源端 padding 掩码,True 表示 padding 位置 - tgt_pad_mask: (B,T) 目标端 padding 掩码(针对输入序列) """ # padding to max length in batch src_max = max(len(b.src) for b in batch) tgt_max = max(len(b.tgt) for b in batch) src_batch = [] tgt_in_batch = [] tgt_out_batch = [] for ex in batch: src = ex.src + [PAD_IDX] * (src_max - len(ex.src)) # Teacher forcing: shift-in, shift-out tgt_in = ex.tgt[:-1] + [PAD_IDX] * (tgt_max - 1 - len(ex.tgt[:-1])) tgt_out = ex.tgt[1:] + [PAD_IDX] * (tgt_max - 1 - len(ex.tgt[1:])) src_batch.append(src) tgt_in_batch.append(tgt_in) tgt_out_batch.append(tgt_out) src = torch.tensor(src_batch, dtype=torch.long) # (B, S) tgt_in = torch.tensor(tgt_in_batch, dtype=torch.long) # (B, T_in) tgt_out = torch.tensor(tgt_out_batch, dtype=torch.long) # (B, T_out) src_pad_mask = src.eq(PAD_IDX) # (B, S) tgt_pad_mask = tgt_in.eq(PAD_IDX) # (B, T) return src, tgt_in, tgt_out, src_pad_mask, tgt_pad_mask 上面就是Dataloader回调函数如何获取批量数据的实现了,输入为一个列表(包含所有样本的列表)。输出为5个2维向量,分别对应的就是上面说的5个批量数据。 首先计算样本列表中最长的源序列长度src_max和目标序列长度tgt_max,为后续的不足长度的句子进行padding操作,提供基准的长度。 其次使用for循环遍历每个样本(Example),将源序列src(encoder的输入)使用PAD_IDX填充到相同长度,保持做对齐;将目标序列输入(tgt_in)去掉最后一个token(EOS)作为decoder的输入,目标序列输出比对样本tgb_out去掉第一个tokenBOS作为监督目标,使用的teacher Forcing机制,这样就是实现了输入预测下一个的训练模式数据准备。 最后就是准备src和tgt_in的mask矩阵,形状跟src和tgt_in一样,使用python的eq比对如果对应的位置是padding就是true,不是就是false。 模型架构 数据准备好了,接下来就是设计我们的模型了。我们的模型是一个翻译模型可以分为两个路径,一个是编码路径和解码路径。 编码路径:词嵌入->位置编码->编码器。 解码路径:词嵌入->位置编码->解码器->生成器。 Class Seq2SeqTransformer(nn.Module): def __init__(self, src_vocab_size, tgt_vocab_size, d_model=128, nhead=4, num_encoder_layers=2, num_decoder_layers=2, dim_ff=256, dropout=0.1): super().__init__() self.d_model = d_model # 编码路径 # 1.词嵌入层,将tokenID转换为密集向量 self.src_tok = nn.Embedding(src_vocab_size, d_model, padding_idx=PAD_IDX) self.tgt_tok = nn.Embedding(tgt_vocab_size, d_model, padding_idx=PAD_IDX) # 2. 对输入添加位置信息 self.pos_enc = PositionalEncoding(d_model, dropout=dropout) # 3. 源序列的编码 self.encoder = Encoder(d_model, nhead, dim_ff, num_encoder_layers, dropout) # 解码路径 # 1. 解码生成目标序列 self.decoder = Decoder(d_model, nhead, dim_ff, num_decoder_layers, dropout) # 2. 将解码器输出转换为词表概率 self.generator = nn.Linear(d_model, tgt_vocab_size) 词嵌入直接调用的是神经网络的库nn.Embedding,其他部分都要自己实现,接下来我们会一一展开。下面我们需要先实现模型Seq2SeqTransformer的方法,主要包括如下: make_subsequent_mask:解码器因果掩码,不允许解码器看到未来。 forward: 模型前向传播的方法,pytorch训练的时候自动调用。 greedy_decode:模型推理方法,用于推理的应用。 因果掩码 为什么需要掩码了?主要是让模型不能看到未来的词。 推理阶段虽然是自回归一个一个输入然后一个一个迭代输出,但是在训练阶段,我们解码器的样本是全部一次性输入的。如下的步骤,我们虽然给到模型输入为:"BOS i have an apple ",但是每个步骤给到模型看到的不能是全部,否则给模型都看到输入结果了,那还谈啥预测,模型会偷懒直接就照搬就是一个映射过程了。如当输入BOS i 期望预测输出i have,如果没有掩码模型都看到全部的"BOS i have an apple ",就不是预测了,模型的参数也没法迭代了。 # 步骤1: 输入BOS → 期望输出i # 步骤2: 输入BOS i → 期望输出i have # 步骤3: 输入BOS i have → 期望输出i have an # 步骤4: 输入BOS i have an → 期望输出 i have an apple # 步骤5: 输入BOS i have an apple → 期望输出i have an apple EOS 哪有个问题,为什么我们输入的时候不按照要多少输入多少,为啥要全部一下给到输入?输入倒是可以要多少输入多少,但是要要考虑模型的并行训练,实际上上面的5个步骤在模型训练时是并行进行的,模型训练要的是训练参数,在某个阶段看到什么输入遇到什么输出,都分好类了自然可以并行的,所以这就需要结合掩码了,告诉模型那个步骤你能看到哪些? 总结一下mask的作用就是让模型不能看到未来的词,同时也是让模型不要对padding位进行误预测。 def make_subsequent_mask(self, sz: int) -> torch.Tensor: """构造大小为 (sz, sz) 的下三角因果掩码;True 为屏蔽(不允许看未来)。""" return torch.triu(torch.ones(sz, sz, dtype=torch.bool), diagonal=1) mask是要生成一个下三角形状,示例如下: # 对于序列长度4 mask = make_subsequent_mask(4) # 结果: # [[False, True, True, True], # 位置0: 只能看位置0 # [False, False, True, True], # 位置1: 能看位置0,1 # [False, False, False, True], # 位置2: 能看位置0,1,2 # [False, False, False, False]] # 位置3: 能看所有位置 前向传播 def forward(self, src, tgt_in, src_pad_mask, tgt_pad_mask): """训练/教师强制阶段的前向。 参数: - src: (B, S) 源 token id - tgt_in: (B, T) 目标端输入(以 BOS 开头) - src_pad_mask: (B, S) True 为 padding - tgt_pad_mask: (B, T) True 为 padding(针对 tgt_in) 返回: - logits: (B, T, V) 词表维度的分类分布 """ # 1) 词嵌入 + 位置编码 src_emb = self.pos_enc(self.src_tok(src)) # (B,S,C) tgt_emb = self.pos_enc(self.tgt_tok(tgt_in)) # (B,T,C) # 2) 编码:仅使用 key_padding_mask 屏蔽 padding memory = self.encoder(src_emb, src_key_padding_mask=src_pad_mask) # (B,S,C) # 3) 解码:自注意力需要因果掩码 + padding 掩码;交叉注意力需要 memory 的 padding 掩码 tgt_mask = self.make_subsequent_mask(tgt_in.size(1)).to(src.device) # (T,T) out = self.decoder( tgt_emb, memory, tgt_mask=tgt_mask, tgt_key_padding_mask=tgt_pad_mask, memory_key_padding_mask=src_pad_mask, ) # (B,T,C) logits = self.generator(out) return logits 上面就是模型的训练了,也比较简单,就是对输入词进行词嵌入+位置编码计算,然后送入编码器得到输出特征矩阵memory;给编码器输入的只是padding的掩码,因为不要提取padding的词; 其次生成因果掩码,将编码器的的特征矩阵输出结果memory以及解码器侧自身的输入给到解码器最终得到(B,T,C)的输出矩阵,其包含了最终输出结果词位置的隐藏信息; 最后调用self.generator(out)即线性变化得到输出目标词表的概率分布(B,T,V);后面就可以用其使用交叉熵跟目标结果进行比对计算损失了。 解码推理 @torch.no_grad() def greedy_decode(self, src_ids: List[int], max_len=20, device="cpu"): """在推理阶段进行贪心解码。 参数: - src_ids: 源端 token id 序列(不含 BOS/EOS) - max_len: 最大生成长度(含 BOS/EOS) - device: 运行设备 返回: - 生成的目标端 id 序列(含 BOS/EOS) """ #切换为评估模式,关闭dropout/batchnorm等随机性 self.eval() # 将源端token id序列转换为张量,并添加一个维度,如[1, 2, 3, 4] -> [[1, 2, 3, 4]] # 变为批维度的 (1, S);dtype 为 long 主要是以适配 nn.Embedding的输入格式。 src = torch.tensor(src_ids, dtype=torch.long, device=device).unsqueeze(0) # 生成一个跟src相同形状的mask矩阵,让编码器不要计算提取pandding的位置信息。 #按元素判断 src 是否等于 PAD_IDX,等于的位置为 True,不等的位置为 False。 src_pad_mask = src.eq(PAD_IDX) # 计算src_tok= src 经过词嵌入+位置编码后的结果 src_tok = self.src_tok(src) src_pos = self.pos_enc(src_tok) # 将该结果送入编码器,返回的memory就是编码器提取的特征向量。 # 输入编码器,即使没有填充(pandding)的token,也需要传入src_key_padding_mask。 memory = self.encoder(src_pos, src_key_padding_mask=src_pad_mask) # 初始化目标端token id序列,维度为(1,1),初始值为BOS_IDX # 表示目标端序列的开始,BOS_IDX=1 # 推理时输入是没有PAD,但是仍然需要tgt_pad_mask. ys = torch.tensor([[BOS_IDX]], dtype=torch.long, device=device) for _ in range(max_len - 1): #计算本次解码的Mask,跟ys形状一样。 tgt_pad_mask = ys.eq(PAD_IDX) # 计算本次因果掩码,把未来看到的token都屏蔽。 tgt_mask = self.make_subsequent_mask(ys.size(1)).to(device) # 可以看到当推理模式时,解码器输入token数量依次是1,2,3,4..... out = self.decoder( self.pos_enc(self.tgt_tok(ys)), memory, tgt_key_padding_mask=tgt_pad_mask, memory_key_padding_mask=src_pad_mask, ) # 转化为预测词的概率分布 logits = self.generator(out[:, -1:, :]) # 使用贪心选择概率最大的作为本次预测的目标 next_token = logits.argmax(-1) next_id = next_token.item() # 显示选择的token token_text = TGT_ITOS[next_id] if next_id < len(TGT_ITOS) else f"ID_{next_id}" print(f"选择: {token_text}({next_id})") ys = torch.cat([ys, next_token], dim=1) # 当下一个输出为EOS时表示结束,则退出。 if next_id == EOS_IDX: break return ys.squeeze(0).tolist() 上面代码的设计要点主要为几个部分: 编码信息提取:将要翻译的句子进行词嵌入,位置编码,然后送入编码器计算提出特征信息memory,最终给到解码器作为输入。 自回归生成:最开始使用BOS一个token+编码器此前计算的输出memory、掩码等信息输入给解码器,解码器预测得到一个输出,然后将输出拼接会此前BOS的后面形成解码器新的输入,以此循环进行预测,直至遇到EOS结束。解侧输入序列长度逐步增长:1 → 2 → 3 → 4 → ...,最开始的序列为BOS表示开始。 掩码生成:使用了因果掩码和padding掩码;虽然推理阶段没有对输入数据进行padding操作,但是依旧需要这两个掩码,主要的考量是保持接口的一致性(原来的接口需要传递这个参数)。 贪心策略:解码器的输出进行线性变化得到词表的概率分布后,然后挑选概率最高的token。 结束循环:当判断到模型预测出EOS时,模式则结束,整个预测完成。 位置编码 class PositionalEncoding(nn.Module): """经典正弦/余弦位置编码。 给定嵌入 `x (B,L,C)`,按长度切片并与位置编码相加,再做 dropout。 """ def __init__(self, d_model: int, max_len: int = 5000, dropout: float = 0.1): super().__init__() self.dropout = nn.Dropout(dropout) # 创建一个形状为 (max_len, d_model) 的零张量,用于存储位置编码 pe = torch.zeros(max_len, d_model) # (L, C) # 创建一个形状为 (max_len, 1) 的张量,用于存储位置索引 position = torch.arange(0, max_len, dtype=torch.float).unsqueeze(1) # (L, 1) # 创建一个形状为 (d_model//2,) 的张量,用于存储位置编码的缩放因子 div_term = torch.exp(torch.arange(0, d_model, 2).float() * (-math.log(10000.0) / d_model)) # sin, cos 交错 pe[:, 0::2] = torch.sin(position * div_term) pe[:, 1::2] = torch.cos(position * div_term) pe = pe.unsqueeze(0) # (1, L, C) self.register_buffer("pe", pe) def forward(self, x: torch.Tensor): # (B, L, C) """为输入嵌入添加位置编码并做 dropout。 参数: - x: (B, L, C) 返回: - (B, L, C) """ x = x + self.pe[:, : x.size(1)] return self.dropout(x) # 对于位置 pos 和维度 i: # 偶数维度: PE(pos, 2i) = sin(pos / 10000^(2i/d_model)) # 奇数维度: PE(pos, 2i+1) = cos(pos / 10000^(2i/d_model)) # pe[:, 0::2]: 选择所有行的偶数列 (0, 2, 4, ...) # pe[:, 1::2]: 选择所有行的奇数列 (1, 3, 5, ...) # 计算过程: # 位置0: sin(0 * div_term), cos(0 * div_term), sin(0 * div_term), ... # 位置1: sin(1 * div_term), cos(1 * div_term), sin(1 * div_term), ... # 位置2: sin(2 * div_term), cos(2 * div_term), sin(2 * div_term), ... 位置编码比较简单,就是按照sin和cos按公式计算生成向量,最终返回词嵌入向量+位置编码向量。 编码器 class Encoder(nn.Module): def __init__(self, d_model: int, nhead: int, dim_ff: int, num_layers: int, dropout: float = 0.1): super().__init__() self.layers = nn.ModuleList([ EncoderLayer(d_model, nhead, dim_ff, dropout) for _ in range(num_layers) ]) def forward(self, x: torch.Tensor, src_key_padding_mask: torch.Tensor | None = None) -> torch.Tensor: """堆叠若干编码层。 参数: - x: (B, S, C) - src_key_padding_mask: (B, S) True 为 padding 返回: - (B, S, C) """ for layer in self.layers: x = layer(x, src_key_padding_mask=src_key_padding_mask) return x 编码器框架就是若干个编码层堆叠起来,但是每层的都有自己的参数,主要调用的是nn.ModuleList进行注册子模块,确保参数都能够被优化器找到,num_layers控制了编码器的深度。 前向传播函数也很简单,输入一次通过每一个编码层,得到的输出结果给到下一个编码层,以此循环最终经过最后一层编码器得得到的特征信息,给后续解码器使用。 class EncoderLayer(nn.Module): """Transformer 编码层(后归一化 post-norm 版本) 子层:自注意力 + 前馈;均带残差连接与 LayerNorm。 """ def __init__(self, d_model: int, nhead: int, dim_ff: int, dropout: float = 0.1): super().__init__() self.self_attn = MultiHeadAttention(d_model, nhead, dropout) self.norm1 = nn.LayerNorm(d_model) self.ff = PositionwiseFeedForward(d_model, dim_ff, dropout) self.norm2 = nn.LayerNorm(d_model) def forward(self, x: torch.Tensor, src_key_padding_mask: torch.Tensor | None = None) -> torch.Tensor: """单层编码层前向。 参数: - x: (B, S, C) - src_key_padding_mask: (B, S) True 为 padding 返回: - (B, S, C) """ # 自注意力子层 attn_out = self.self_attn(x, x, x, attn_mask=None, key_padding_mask=src_key_padding_mask) x = self.norm1(x + attn_out) # 前馈子层 ff_out = self.ff(x) x = self.norm2(x + ff_out) return x 编码层的组件为MultiHeadAttention、LayerNorm、PositionwiseFeedForward这与我们此前介绍的transformer原理一致。 其前向传播过程,首先输入X(查询),X(键),X(值),qkv都是一样的;注意力计算时,把attn_mask=None,因为编码器不需要因果掩码,但是需要padding mask。其次进行残差连接计算x+attn_out,再调用norml进行层归一化,最后是计算前馈网络,再进行归一化就得到一层的输出结果了。 class PositionwiseFeedForward(nn.Module): """前馈网络:逐位置的两层 MLP(含激活与 dropout)""" def __init__(self, d_model: int, dim_ff: int, dropout: float = 0.1): super().__init__() self.fc1 = nn.Linear(d_model, dim_ff) self.fc2 = nn.Linear(dim_ff, d_model) self.act = nn.ReLU() self.dropout = nn.Dropout(dropout) def forward(self, x: torch.Tensor) -> torch.Tensor: """两层逐位置前馈网络。 参数: - x: (B, L, C) 返回: - (B, L, C) """ x = self.fc2(self.dropout(self.act(self.fc1(x)))) x = self.dropout(x) return x 前馈网络主要两层: 第一层:d_model → dim_ff (通常 dim_ff = 4 * d_model) 激活函数:ReLU。 第二层:dim_ff → d_model 就是对输入进行升维然后非线性变化再降维,提取更多的信息。两层都使用了dropout,展开就是如下。 # 1. 第一层线性变换 x = self.fc1(x) # (B, L, C) → (B, L, dim_ff) # 2. 激活函数 x = self.act(x) # 应用ReLU # 3. 第一个dropout x = self.dropout(x) # 随机置零部分神经元 # 4. 第二层线性变换 x = self.fc2(x) # (B, L, dim_ff) → (B, L, C) # 5. 第二个dropout x = self.dropout(x) # 最终dropout 解码器 class Decoder(nn.Module): def __init__(self, d_model: int, nhead: int, dim_ff: int, num_layers: int, dropout: float = 0.1): super().__init__() self.layers = nn.ModuleList([ DecoderLayer(d_model, nhead, dim_ff, dropout) for _ in range(num_layers) ]) def forward( self, x: torch.Tensor, memory: torch.Tensor, tgt_mask: torch.Tensor | None = None, tgt_key_padding_mask: torch.Tensor | None = None, memory_key_padding_mask: torch.Tensor | None = None, ) -> torch.Tensor: """堆叠若干解码层。 参数: - x: (B, T, C) 目标端嵌入 - memory: (B, S, C) 编码器输出 - tgt_mask: (T, T) 因果掩码,True 为屏蔽 - tgt_key_padding_mask: (B, T) 目标端 padding 掩码 - memory_key_padding_mask: (B, S) 源端 padding 掩码 返回: - (B, T, C) """ for layer in self.layers: x = layer( x, memory, tgt_mask=tgt_mask, tgt_key_padding_mask=tgt_key_padding_mask, memory_key_padding_mask=memory_key_padding_mask, ) return x 与编码器类似,使用nn.ModuleList创建多个解码层,每个解码层都是独立的DecoderLayer实例;解码器的输入数据有两个,一个是解码器侧自己的输入序列,另外一个是编码器计算得到的特征信息。解码器的每一层都需要输入编码器给的特征序列,但是都是一样的;解码器层计算得到的输出将传递给下一层解码器层,循环得到最后的输出。 Decoder (解码器) ├── DecoderLayer 1 (解码层1) │ ├── MultiHeadAttention (自注意力) │ ├── LayerNorm1 + 残差连接 │ ├── MultiHeadAttention (交叉注意力) │ ├── LayerNorm2 + 残差连接 │ ├── PositionwiseFeedForward (前馈网络) │ └── LayerNorm3 + 残差连接 ├── DecoderLayer 2 (解码层2) │ └── ... (同上结构) └── ... (重复 num_layers 次) 输入: x (B, T, C) + memory (B, S, C) → DecoderLayer 1 → DecoderLayer 2 → ... → DecoderLayer N → 输出: (B, T, C) 其前向传播也大同小异,与编码器不同的是需要传递因果掩码,tgt_mask,防止看到未来信息,同时还传入了源序列的pandding掩码,跟输入给编码器的mask是一样的。 class DecoderLayer(nn.Module): """Transformer 解码层(自注意力 + 交叉注意力 + 前馈)""" def __init__(self, d_model: int, nhead: int, dim_ff: int, dropout: float = 0.1): super().__init__() self.self_attn = MultiHeadAttention(d_model, nhead, dropout) self.norm1 = nn.LayerNorm(d_model) self.cross_attn = MultiHeadAttention(d_model, nhead, dropout) self.norm2 = nn.LayerNorm(d_model) self.ff = PositionwiseFeedForward(d_model, dim_ff, dropout) self.norm3 = nn.LayerNorm(d_model) def forward( self, x: torch.Tensor, memory: torch.Tensor, tgt_mask: torch.Tensor | None = None, tgt_key_padding_mask: torch.Tensor | None = None, memory_key_padding_mask: torch.Tensor | None = None, ) -> torch.Tensor: """单层解码层前向。 参数: - x: (B, T, C) 解码器输入 - memory: (B, S, C) 编码器输出 - tgt_mask: (T, T) 因果掩码,true为屏蔽 - tgt_key_padding_mask: (B, T) - memory_key_padding_mask: (B, S) 返回: - (B, T, C) """ # 1) 解码器自注意力(带因果掩码 tgt_mask) sa = self.self_attn(x, x, x, attn_mask=tgt_mask, key_padding_mask=tgt_key_padding_mask) x = self.norm1(x + sa) # 2) 交叉注意力:Q 来自解码器,K/V 来自编码器 memory ca = self.cross_attn(x, memory, memory, attn_mask=None, key_padding_mask=memory_key_padding_mask) x = self.norm2(x + ca) # 3) 前馈 ff = self.ff(x) x = self.norm3(x + ff) return x 解码器层比编码器层多了一个cross_attn交叉注意力。除了输入数据有些不同,其他都基本类似,下面按前向传播的流程来分析一下。 首先是第一个子层自注意力的计算,输入X(q),X(k),X(v)来自解码器侧路径的输入,推理模式则是由自己预测自回归的输入,训练模式是给定的。自注意力传入了因果掩码attn_mask和屏蔽pandding mask。 其次就是计算残差和层归一化,与编码器类似。 接着就是计算交叉注意力了,核心的注意力类还是MultiHeadAttention,跟编码器和解码器的都来自一个。唯一的区别就是传入的参数不一样,其中查询Q来自于解码器当前的状态X即解码器上一个自注意力的的输出,特征路径是解码器给的信息。而键值K,V则使用的是编码器的输出memory,不使用因果掩码,因为因果掩码前面已经处理了。 最后就是前馈网络的升维和降维处理等了,跟编码器就一样了,就不阐述了。 三个子层的不同作用: 自注意力层:处理目标序列内部的关系,生成"i have an apple"时,"have"应该关注"i","an"应该关注"i have",通过因果掩码确保只能看到历史信息。 交叉注意力层:让解码器"看到"编码器的信息,翻译成英文时,需要参考中文源序列,通过交叉注意力,解码器可以访问编码器的完整表示。 前馈网络则层:增加非线性表达能力,每个位置独立计算,不涉及位置间的关系。 注意力 接下来就是核心MultiHeadAttention。 MultiHeadAttention class MultiHeadAttention(nn.Module): """多头注意力(Batch-first) - 输入输出为 (B, L, C) - 内部将通道 C 切分到 H 个头,每头维度 Dh=C/H - 支持两类掩码: 1) attn_mask: (Lq, Lk) 下三角等自回归掩码 2) key_padding_mask: (B, Lk) 序列 padding 掩码 两者会在内部合并为可广播到 (B,H,Lq,Lk) 的布尔张量。 """ def __init__(self, d_model: int, nhead: int, dropout: float = 0.1): super().__init__() assert d_model % nhead == 0, "d_model 必须能被 nhead 整除" self.d_model = d_model self.nhead = nhead self.d_head = d_model // nhead self.w_q = nn.Linear(d_model, d_model) self.w_k = nn.Linear(d_model, d_model) self.w_v = nn.Linear(d_model, d_model) self.attn = ScaledDotProductAttention(dropout) self.proj = nn.Linear(d_model, d_model) self.dropout = nn.Dropout(dropout) # 将 (B, L, C) 重塑为 (B, L, H, Dh),原来的数据都不会变化,只是形状改变了 # 加了一个维,然后交换了张量维度顺序。 def _shape(self, x: torch.Tensor) -> torch.Tensor: """(B, L, C) 切分重排为 (B, H, L, Dh)。""" B, L, C = x.shape # 第一步:将 (B, L, C) 重塑为 (B, L, H, Dh) x_reshaped = x.view(B, L, self.nhead, self.d_head) #x.view不复制数据,只是改变数据的"视角",数据在内存中存储顺序不变 # 第二步:交换维度 1 和 2,从 (B, L, H, Dh) 变为 (B, H, L, Dh) x_transposed = x_reshaped.transpose(1, 2) return x_transposed def _merge(self, x: torch.Tensor) -> torch.Tensor: """(B, H, L, Dh) 合并重排回 (B, L, C)。""" B, H, L, Dh = x.shape # 第一步:交换维度 1 和 2,从 (B, H, L, Dh) 变为 (B, L, H, Dh) x_transposed = x.transpose(1, 2) # 第二步:确保内存连续,然后重塑为 (B, L, H*Dh) x_contiguous = x_transposed.contiguous() # 第三步:重塑为 (B, L, C) 其中 C = H * Dh x_reshaped = x_contiguous.view(B, L, H * Dh) return x_reshaped # 因为QKV算的是矩阵,在transformer中涉及到两个mask # 一个是attn_mask控制哪些位置可以相互关注,如因果掩码防止看未来 # 一个是key_padding_mask控制哪些位置是有效的,如填充token不应该被关注 # 因为都要计算所以把这两个使用|合并起来,一起跟QKV计算即可,否则得计算两次。 # 对于encode来说传参只会穿key_pandding_mask,另外一个没有 # 对于decoder来说,两个都会传递。 def _build_attn_mask( self, Lq: int, Lk: int, attn_mask: torch.Tensor | None, key_padding_mask: torch.Tensor | None, device: torch.device, ) -> torch.Tensor | None: """将两类掩码合并成 (1/ B, 1/ H, Lq, Lk) 可广播布尔张量。True 表示屏蔽。""" mask = None if attn_mask is not None: # (Lq, Lk) -> (1,1,Lq,Lk) m1 = attn_mask.to(device).unsqueeze(0).unsqueeze(0) mask = m1 if mask is None else (mask | m1) if key_padding_mask is not None: # (B, Lk) -> (B,1,1,Lk) m2 = key_padding_mask.to(device).unsqueeze(1).unsqueeze(1) mask = m2 if mask is None else (mask | m2) return mask (0)网络层定义 self.w_q = nn.Linear(d_model, d_model) # 查询线性变换 self.w_k = nn.Linear(d_model, d_model) # 键线性变换 self.w_v = nn.Linear(d_model, d_model) # 值线性变换 self.attn = ScaledDotProductAttention(dropout) # 缩放点积注意力 self.proj = nn.Linear(d_model, d_model) # 输出投影 self.dropout = nn.Dropout(dropout) # 输出dropout w_q, w_k, w_v: 将输入转换为查询、键、值表示,attn为计算注意力权重和加权求和,proj将多头结果投影会原始维度,dropout是防止过拟合。 (1)将输入分成多个头 对输入按照head划分为多份,所以这里需要注意的是d_model必现要能被nhead整除,确保每个头有相同的维度。如原来的输入为(B,L,C)切分后变成(B, H, L, Dh),Dh=d_model/nhead。 第一步先使用view重塑为(B, H, L, Dh),然后第二步进行重排。举个例子输入为(B, L, C) = (1, 4, 6)重塑为(B, L, H, Dh) = (1, 4, 2, 3),重塑后的内存布局,[word1_head1_3, word1_head2_3, word2_head1_3, word2_head2_3, ...]每个词的头是交错存储的,为了适应多头注意力的并行计算还要重排一下,让每个头的数据连续存储。 (2)掩码合并 将key_padding_mask和attn_mask(因果)进行合并,这样后续计算就不用计算两次了。 # 使用逻辑或运算 | 合并 # True | True = True (屏蔽) # True | False = True (屏蔽) # False | False = False (不屏蔽) # 最终掩码形状: (B, H, Lq, Lk) 或 (1, H, Lq, Lk) # 可以广播到注意力计算的形状 (3)每个头计算注意力 Q = self._shape(self.w_q(query)) # (B,H,Lq,Dh) K = self._shape(self.w_k(key)) # (B,H,Lk,Dh) V = self._shape(self.w_v(value)) # (B,H,Lk,Dh) mask = self._build_attn_mask(Lq, Lk, attn_mask, key_padding_mask, device) out = self.attn(Q, K, V, mask) # (B,H,Lq,Dh) 计算注意力时,首先对输入分别进行计算线性变换(如QxWq,这样就有参数了)然后重排分别得到QKV,对于编码器来说输入的query、key、value都是一样的,计算QKV的方式也是一样的,都是进行线性nn.Linear层然后再进行重排,但是各自有各自参数,这就是要训练的参数。经过线性层的结果后都需要调用_shape进行重排划分为多个头的数据,便于输入给多头注意力;构建好合并后的掩码之后,就传递到attn中计算注意力。计算出的多头的注意力,需要合并为原来的形状,最后再通过一个线性变化得到最后的结果输出。 完整的数据流示例: # 输入: query (1, 4, 6), key (1, 4, 6), value (1, 4, 6) # 参数: d_model=6, nhead=2, d_head=3 # 步骤1: 线性变换 (保持形状) # w_q(query): (1, 4, 6) -> (1, 4, 6) # w_k(key): (1, 4, 6) -> (1, 4, 6) # w_v(value): (1, 4, 6) -> (1, 4, 6) # 每个词从6维变换到6维 # 学习查询、键、值的表示 # 步骤2: 分头 # _shape(w_q(query)): (1, 4, 6) -> (1, 2, 4, 3) # _shape(w_k(key)): (1, 4, 6) -> (1, 2, 4, 3) # _shape(w_v(value)): (1, 4, 6) -> (1, 2, 4, 3) # 将6维分成2个头,每个头3维 # 头1: 3维表示 # 头2: 3维表示 # 步骤3: 注意力计算 # attn(Q, K, V, mask): (1, 2, 4, 3) -> (1, 2, 4, 3) # 每个头独立计算注意力: # 头1: 计算4个位置之间的注意力,每个位置3维 # 头2: 计算4个位置之间的注意力,每个位置3维 # 步骤4: 合并头 # _merge(out): (1, 2, 4, 3) -> (1, 4, 6) # 将2个头的3维表示合并回6维 # 每个位置现在包含所有头的信息 # 步骤5: 输出变换 # proj(out): (1, 4, 6) -> (1, 4, 6) # dropout(out): (1, 4, 6) -> (1, 4, 6) # 最终输出: (1, 4, 6) ScaledDotProductAttention class ScaledDotProductAttention(nn.Module): """缩放点积注意力(单头) 给定 Q(查询)、K(键)、V(值) 与掩码,计算注意力加权输出。 形状约定: - Q: (B, H, Lq, Dh) - K: (B, H, Lk, Dh) - V: (B, H, Lk, Dh) - mask: 可广播到 (B, H, Lq, Lk),True 表示屏蔽。 """ def __init__(self, dropout: float = 0.1): super().__init__() self.dropout = nn.Dropout(dropout) def forward(self, Q: torch.Tensor, K: torch.Tensor, V: torch.Tensor, mask: torch.Tensor | None = None): """计算缩放点积注意力。 参数: - Q: (B, H, Lq, Dh) - K: (B, H, Lk, Dh) - V: (B, H, Lk, Dh) - mask: 可广播到 (B, H, Lq, Lk) 的布尔掩码,True 表示屏蔽 返回: - (B, H, Lq, Dh) """ d_k = Q.size(-1) # 注意力分数 = QK^T / sqrt(dk) scores = torch.matmul(Q, K.transpose(-2, -1)) / math.sqrt(d_k) # (B,H,Lq,Lk) if mask is not None: # 对被屏蔽位置填充一个极小值,softmax 后 ~0 scores = scores.masked_fill(mask, float("-inf")) attn = torch.softmax(scores, dim=-1) # (B,H,Lq,Lk) attn = self.dropout(attn) out = torch.matmul(attn, V) # (B,H,Lq,Dh) return out 这里就是实现缩放点积注意力机制了,Q.transpose(-2, -1)将K的最后两个维度转置,torch.matmul(Q, K^T): 计算Q和K的点积,再math.sqrt(d_k): 缩放因子,防止分数过大。 可以看到会根据传入的mask进行处理,让mask=True的位置会被填充为-inf,这样经过softmax之后,这些位置就接近0,从而实现了屏蔽某位位置的效果。 softmax是将分数转换为概率分布,所有位置的权重和为1,分数越高的位置,权重越大,也就是跟词相关性越大提取的值越丰富,如果是0那基本不相关,掩码为true的位置就是0,也就是基本不提取信息。 总结一下,核心就是公式Attention(Q,K,V) = softmax(QK^T/√d_k)V计算。 应用 接下来就是调用应用了 device = torch.device("cuda" if torch.cuda.is_available() else "cpu") dataset = ToyDataset(pairs) loader = DataLoader(dataset, batch_size=8, shuffle=True, collate_fn=collate_fn) model = Seq2SeqTransformer( src_vocab_size=len(SRC_ITOS), tgt_vocab_size=len(TGT_ITOS), d_model=6, nhead=3, num_encoder_layers=2, num_decoder_layers=2, dim_ff=256, dropout=0.1 ).to(device) criterion = nn.CrossEntropyLoss(ignore_index=PAD_IDX) optimizer = torch.optim.AdamW(model.parameters(), lr=3e-4) 定义dataset、loader准备数据,然后定义模型model,损失函数定义以及优化方法。 def evaluate_sample(sent="我 有 一个 苹果"): """辅助函数:对输入中文句子进行编码→推理→解码并打印结果。""" ids = encode_src(sent) print("ids",ids) pred_ids = model.greedy_decode(ids, device=device) pred_text = decode_tgt(pred_ids) print(f'INPUT : {sent}') print(f'OUTPUT: {pred_text}\n') print("Before training:") evaluate_sample("我 有 一个 苹果") 上面是整个应用翻译应用,在没有训练出参数,自然预测出的结果是不对的。 EPOCHS = 800 # 小步数即可过拟合玩具数据 for epoch in range(1, EPOCHS + 1): model.train() total_loss = 0.0 for src, tgt_in, tgt_out, src_pad_mask, tgt_pad_mask in loader: src = src.to(device) tgt_in = tgt_in.to(device) tgt_out = tgt_out.to(device) src_pad_mask = src_pad_mask.to(device) tgt_pad_mask = tgt_pad_mask.to(device) logits = model(src, tgt_in, src_pad_mask, tgt_pad_mask) # (B, T, V) loss = criterion(logits.reshape(-1, logits.size(-1)), tgt_out.reshape(-1)) optimizer.zero_grad() loss.backward() torch.nn.utils.clip_grad_norm_(model.parameters(), 1.0) optimizer.step() total_loss += loss.item() if epoch % 5 == 0 or epoch == 1: print(f"Epoch {epoch:02d} | loss={total_loss/len(loader):.4f}") evaluate_sample("我 有 一个 苹果") 上面是训练过程。 常见问题 (1) 解码器训练时的输入和推理时的输入有什么不同? 训练模式是固定长度输入,例如(2,5),所有样本都padding到相同长度,批次内所有样本的长度一致。 # 使用教师强制,目标序列已知 tgt_in = [BOS, i, have, an, apple,PAD] # 完整的输入序列 tgt_out = [i, have, an, apple, EOS] # 完整的监督目标 而推理模式序列长度随着时间步逐步增长,例如# 例如: (1, 1) → (1, 2) → (1, 3) → ...,每次生成后长度+1。 # 逐步生成,每次只预测下一个token ys = [[BOS_ID]] # 第1步 ys = [[BOS_ID, i]] # 第2步 ys = [[BOS_ID, i, have]] # 第3步 ys = [[BOS_ID, i, have, an]] # 第4步 ys = [[BOS_ID, i, have, an,apple]] # 第5步 之所以有这样的差异是训练时用的是Teacher Forcing优势,使用了并行计算让所有位置可以同时计算预测,提高效率快速收敛。而推理时是自回归模式,每个token的生成只能基于之前输出的信息。 (2)什么情况下输入数据需要PAD? 通常无论是编码器的输入还是解码器的输入如果不是批量并行计算都可以不用PAD,但如果是批量并行都需要PAD MASK。 在训练模式下,为了提高效率需要批量并行计算,所以无论编码器还是解码器的输入都是需要PAD,在本文中要不要PAD动作是在DataLoader的回调函数中collate_fn进行的,会对编码器和解码器的输入都会pad对齐到一样的长度。 因此最主要的考量是否要批量并行计算,因为并行计算如果长度不同,无法并行处理,无论是自注意力分数、前馈网络、还是残差连接,只有长度一致,才能并行一下处理多个样本。而往往训练模型基本都是批量处理。 总之只处理一个样本时可以不需要PAD,如果要批量都一定需要PAD。而只处理一个样本,往往是推理模式场景。 (3)既然推理模式的编码器和解码器输入没有进行PAD到一定长度,那为什么无论编码器和解码器都依旧还需要传入PAD mask? 需要PAD mask我认为本质上有两点原因:其一用于告知模型输入序列的长度,其二为了接口的一致性,因为transformer最核心的是无论编码器还是解码器最终的核心是Scaled Dot-Product Attetion,可以理解为这是一个共有底层函数,都要调用,做兼容了所以一定要传这个参数。 (3)推理模式的解码器既然是一个一个token往后生成的然后依次拼接回给到输入,未来的词其实根本就没有输入,为什么还需要下三角度的因果mask? 本质上还是保证接口的兼容性,这块都无论是推理还是训练模式都需要传入这个因果mask。 首先在实现层面让训练模式和推理模式代码能够兼容,训练模式使用的是teacher forcing把整个目标序列一次性喂进去,那自然不能让模型看到未来token。推理模式严格上如果一次一个token,每次只输入已经生成的部分,在这种最简单的视线下,确实不需要再加下三角mask,因为未来token不存在,自然无法attend到。但是大多数框架都选择统一接口,无论训练还是推理都传causal mask,避免在不同模式下切换逻辑。 其次从推理模式的多样性考虑,即使是推理阶段,也有可能遇到这种情况,也就是批量生成,一次生成多个序列,每个序列长度不同。 下三角是一个通用的"未来屏蔽"机制,不只是为了防止模型看见未来token,也是为了让实现和训练推理保持一致,并支持批量/并行推理优化。 附:完整源码 # toy_transformer_translation.py # A tiny, runnable Transformer seq2seq example to translate Chinese->English on a toy dataset. # PyTorch >= 2.0 recommended. import math import random from dataclasses import dataclass from typing import List, Tuple import torch import torch.nn as nn from torch.utils.data import DataLoader, Dataset random.seed(0) torch.manual_seed(0) # -------------------------- # 1) Toy parallel corpus # -------------------------- pairs = [ # 基本陈述 ("我 有 一个 苹果", "i have an apple"), ("我 有 一本 书", "i have a book"), ("你 有 一个 苹果", "you have an apple"), ("他 有 一个 苹果", "he has an apple"), ("她 有 一个 苹果", "she has an apple"), ("我们 有 一个 苹果", "we have an apple"), ("我 喜欢 苹果", "i like apples"), ("我 吃 苹果", "i eat apples"), ("你 喜欢 书", "you like books"), ("我 喜欢 书", "i like books"), # 稍作扩展 ("我 有 两个 苹果", "i have two apples"), ("我 有 红色 苹果", "i have red apples"), ] # 中文使用"空格分词(简化)",英文用空格分词 def build_vocab(examples: List[str]): """构建词表(字符串→索引 与 索引→字符串) - 输入示例为用空格分词后的句子列表 - 加入特殊符号 `<pad>`, `<bos>`, `<eos>` 并将其它 token 排序,保证可复现 返回: stoi: dict[token->id] itos: List[id->token] """ tokens = set() # 建立一个集合,用于存储所有不同的token for s in examples: # 遍历所有句子,s是句子,如我 有 一个 苹果 for t in s.split(): # 遍历句子中的每个token,t是token,如我 tokens.add(t.lower()) # 将token添加到集合中,并转换为小写,如我 # 特殊符号 itos = ["<pad>", "<bos>", "<eos>"] + sorted(tokens) # 将特殊符号和所有不同的token排序 # print(itos) stoi = {t: i for i, t in enumerate(itos)} # 将token和索引建立映射关系 # print(stoi) return stoi, itos src_texts = [p[0] for p in pairs] tgt_texts = [p[1] for p in pairs] print("src_texts",src_texts) print("tgt_texts",tgt_texts) SRC_STOI, SRC_ITOS = build_vocab(src_texts) print("SRC_STOI",SRC_STOI) print("SRC_ITOS",SRC_ITOS) TGT_STOI, TGT_ITOS = build_vocab(tgt_texts) print("TGT_STOI",TGT_STOI) print("TGT_ITOS",TGT_ITOS) PAD_IDX, BOS_IDX, EOS_IDX = 0, 1, 2 #将源语句编码为索引序列(不含 BOS/EOS),如我 有 一个 苹果 -> [1, 2, 3, 4] def encode_src(s: str) -> List[int]: """将原语句(已空格分词)编码为索引序列(不含 BOS/EOS)。""" return [SRC_STOI[w.lower()] for w in s.split()] def encode_tgt(s: str) -> List[int]: """将目标语句编码为索引序列,并在首尾添加 BOS/EOS。""" return [BOS_IDX] + [TGT_STOI[w.lower()] for w in s.split()] + [EOS_IDX] def decode_tgt(ids: List[int]) -> str: """将目标端索引序列解码回字符串(忽略 PAD/BOS,遇到 EOS 停止)。""" words = [] for i in ids: if i == EOS_IDX: break if i in (PAD_IDX, BOS_IDX): continue words.append(TGT_ITOS[i]) return " ".join(words) @dataclass class Example: """单条并行样本 - src: 源语言索引序列(不含 BOS/EOS) - tgt: 目标语言索引序列(含 BOS/EOS) """ src: List[int] tgt: List[int] class ToyDataset(Dataset): """极小玩具平行语料数据集,用于快速过拟合演示。""" def __init__(self, pairs: List[Tuple[str, str]]): self.data = [Example(encode_src(s), encode_tgt(t)) for s, t in pairs] def __len__(self): return len(self.data) def __getitem__(self, idx): return self.data[idx] def collate_fn(batch: List[Example]): """将一个 batch 的样本对齐为等长张量,并构造 teacher forcing 所需的输入/输出。 返回: - src: (B,S) 源序列,已 padding - tgt_in: (B,T) 解码器输入(含 BOS,右对齐 padding) - tgt_out: (B,T) 解码器监督目标(对 tgt_in 右移一位,含 EOS) - src_pad_mask: (B,S) 源端 padding 掩码,True 表示 padding 位置 - tgt_pad_mask: (B,T) 目标端 padding 掩码(针对输入序列) """ # padding to max length in batch src_max = max(len(b.src) for b in batch) tgt_max = max(len(b.tgt) for b in batch) src_batch = [] tgt_in_batch = [] tgt_out_batch = [] for ex in batch: src = ex.src + [PAD_IDX] * (src_max - len(ex.src)) # Teacher forcing: shift-in, shift-out tgt_in = ex.tgt[:-1] + [PAD_IDX] * (tgt_max - 1 - len(ex.tgt[:-1])) tgt_out = ex.tgt[1:] + [PAD_IDX] * (tgt_max - 1 - len(ex.tgt[1:])) src_batch.append(src) tgt_in_batch.append(tgt_in) tgt_out_batch.append(tgt_out) src = torch.tensor(src_batch, dtype=torch.long) # (B, S) tgt_in = torch.tensor(tgt_in_batch, dtype=torch.long) # (B, T_in) tgt_out = torch.tensor(tgt_out_batch, dtype=torch.long) # (B, T_out) src_pad_mask = src.eq(PAD_IDX) # (B, S) tgt_pad_mask = tgt_in.eq(PAD_IDX) # (B, T) return src, tgt_in, tgt_out, src_pad_mask, tgt_pad_mask # -------------------------- # 2) Positional encoding # -------------------------- class PositionalEncoding(nn.Module): """经典正弦/余弦位置编码。 给定嵌入 `x (B,L,C)`,按长度切片并与位置编码相加,再做 dropout。 """ def __init__(self, d_model: int, max_len: int = 5000, dropout: float = 0.1): super().__init__() self.dropout = nn.Dropout(dropout) # 创建一个形状为 (max_len, d_model) 的零张量,用于存储位置编码 pe = torch.zeros(max_len, d_model) # (L, C) # 创建一个形状为 (max_len, 1) 的张量,用于存储位置索引 position = torch.arange(0, max_len, dtype=torch.float).unsqueeze(1) # (L, 1) # 创建一个形状为 (d_model//2,) 的张量,用于存储位置编码的缩放因子 div_term = torch.exp(torch.arange(0, d_model, 2).float() * (-math.log(10000.0) / d_model)) # sin, cos 交错 pe[:, 0::2] = torch.sin(position * div_term) pe[:, 1::2] = torch.cos(position * div_term) pe = pe.unsqueeze(0) # (1, L, C) self.register_buffer("pe", pe) def forward(self, x: torch.Tensor): # (B, L, C) """为输入嵌入添加位置编码并做 dropout。 参数: - x: (B, L, C) 返回: - (B, L, C) """ x = x + self.pe[:, : x.size(1)] return self.dropout(x) # -------------------------- # 3) 手写 Transformer 编码/解码层(含详细注释) # -------------------------- class ScaledDotProductAttention(nn.Module): """缩放点积注意力(单头) 给定 Q(查询)、K(键)、V(值) 与掩码,计算注意力加权输出。 形状约定: - Q: (B, H, Lq, Dh) - K: (B, H, Lk, Dh) - V: (B, H, Lk, Dh) - mask: 可广播到 (B, H, Lq, Lk),True 表示屏蔽。 """ def __init__(self, dropout: float = 0.1): super().__init__() self.dropout = nn.Dropout(dropout) def forward(self, Q: torch.Tensor, K: torch.Tensor, V: torch.Tensor, mask: torch.Tensor | None = None): """计算缩放点积注意力。 参数: - Q: (B, H, Lq, Dh) - K: (B, H, Lk, Dh) - V: (B, H, Lk, Dh) - mask: 可广播到 (B, H, Lq, Lk) 的布尔掩码,True 表示屏蔽 返回: - (B, H, Lq, Dh) """ d_k = Q.size(-1) # 注意力分数 = QK^T / sqrt(dk) scores = torch.matmul(Q, K.transpose(-2, -1)) / math.sqrt(d_k) # (B,H,Lq,Lk) if mask is not None: # 对被屏蔽位置填充一个极小值,softmax 后 ~0 scores = scores.masked_fill(mask, float("-inf")) attn = torch.softmax(scores, dim=-1) # (B,H,Lq,Lk) attn = self.dropout(attn) out = torch.matmul(attn, V) # (B,H,Lq,Dh) return out class MultiHeadAttention(nn.Module): """多头注意力(Batch-first) - 输入输出为 (B, L, C) - 内部将通道 C 切分到 H 个头,每头维度 Dh=C/H - 支持两类掩码: 1) attn_mask: (Lq, Lk) 下三角等自回归掩码 2) key_padding_mask: (B, Lk) 序列 padding 掩码 两者会在内部合并为可广播到 (B,H,Lq,Lk) 的布尔张量。 """ def __init__(self, d_model: int, nhead: int, dropout: float = 0.1): super().__init__() assert d_model % nhead == 0, "d_model 必须能被 nhead 整除" self.d_model = d_model self.nhead = nhead self.d_head = d_model // nhead self.w_q = nn.Linear(d_model, d_model) self.w_k = nn.Linear(d_model, d_model) self.w_v = nn.Linear(d_model, d_model) self.attn = ScaledDotProductAttention(dropout) self.proj = nn.Linear(d_model, d_model) self.dropout = nn.Dropout(dropout) # 将 (B, L, C) 重塑为 (B, L, H, Dh),原来的数据都不会变化,只是形状改变了 # 加了一个维,然后交换了张量维度顺序。 def _shape(self, x: torch.Tensor) -> torch.Tensor: """(B, L, C) 切分重排为 (B, H, L, Dh)。""" B, L, C = x.shape # 第一步:将 (B, L, C) 重塑为 (B, L, H, Dh) x_reshaped = x.view(B, L, self.nhead, self.d_head) #x.view不复制数据,只是改变数据的"视角",数据在内存中存储顺序不变 # 第二步:交换维度 1 和 2,从 (B, L, H, Dh) 变为 (B, H, L, Dh) x_transposed = x_reshaped.transpose(1, 2) return x_transposed def _merge(self, x: torch.Tensor) -> torch.Tensor: """(B, H, L, Dh) 合并重排回 (B, L, C)。""" B, H, L, Dh = x.shape # 第一步:交换维度 1 和 2,从 (B, H, L, Dh) 变为 (B, L, H, Dh) x_transposed = x.transpose(1, 2) # 第二步:确保内存连续,然后重塑为 (B, L, H*Dh) x_contiguous = x_transposed.contiguous() # 第三步:重塑为 (B, L, C) 其中 C = H * Dh x_reshaped = x_contiguous.view(B, L, H * Dh) return x_reshaped # 因为QKV算的是矩阵,在transformer中涉及到两个mask # 一个是attn_mask控制哪些位置可以相互关注,如因果掩码防止看未来 # 一个是key_padding_mask控制哪些位置是有效的,如填充token不应该被关注 # 因为都要计算所以把这两个使用|合并起来,一起跟QKV计算即可,否则得计算两次。 # 对于encode来说传参只会穿key_pandding_mask,另外一个没有 # 对于decoder来说,两个都会传递。 def _build_attn_mask( self, Lq: int, Lk: int, attn_mask: torch.Tensor | None, key_padding_mask: torch.Tensor | None, device: torch.device, ) -> torch.Tensor | None: """将两类掩码合并成 (1/ B, 1/ H, Lq, Lk) 可广播布尔张量。True 表示屏蔽。""" mask = None if attn_mask is not None: # (Lq, Lk) -> (1,1,Lq,Lk) m1 = attn_mask.to(device).unsqueeze(0).unsqueeze(0) mask = m1 if mask is None else (mask | m1) if key_padding_mask is not None: # (B, Lk) -> (B,1,1,Lk) m2 = key_padding_mask.to(device).unsqueeze(1).unsqueeze(1) mask = m2 if mask is None else (mask | m2) return mask def forward( self, query: torch.Tensor, key: torch.Tensor, value: torch.Tensor, attn_mask: torch.Tensor | None = None, key_padding_mask: torch.Tensor | None = None, ) -> torch.Tensor: """多头注意力前向。 参数: - query, key, value: (B, L, C) - attn_mask: (Lq, Lk) 因果/结构掩码,True 为屏蔽 - key_padding_mask: (B, Lk) padding 掩码,True 为 padding 返回: - (B, Lq, C) """ # 输入均为 (B, L, C) B, Lq, _ = query.shape _, Lk, _ = key.shape device = query.device Q = self._shape(self.w_q(query)) # (B,H,Lq,Dh) K = self._shape(self.w_k(key)) # (B,H,Lk,Dh) V = self._shape(self.w_v(value)) # (B,H,Lk,Dh) mask = self._build_attn_mask(Lq, Lk, attn_mask, key_padding_mask, device) out = self.attn(Q, K, V, mask) # (B,H,Lq,Dh) out = self._merge(out) # (B,Lq,C) out = self.proj(out) out = self.dropout(out) return out class PositionwiseFeedForward(nn.Module): """前馈网络:逐位置的两层 MLP(含激活与 dropout)""" def __init__(self, d_model: int, dim_ff: int, dropout: float = 0.1): super().__init__() self.fc1 = nn.Linear(d_model, dim_ff) self.fc2 = nn.Linear(dim_ff, d_model) self.act = nn.ReLU() self.dropout = nn.Dropout(dropout) def forward(self, x: torch.Tensor) -> torch.Tensor: """两层逐位置前馈网络。 参数: - x: (B, L, C) 返回: - (B, L, C) """ x = self.fc2(self.dropout(self.act(self.fc1(x)))) x = self.dropout(x) return x class EncoderLayer(nn.Module): """Transformer 编码层(后归一化 post-norm 版本) 子层:自注意力 + 前馈;均带残差连接与 LayerNorm。 """ def __init__(self, d_model: int, nhead: int, dim_ff: int, dropout: float = 0.1): super().__init__() self.self_attn = MultiHeadAttention(d_model, nhead, dropout) self.norm1 = nn.LayerNorm(d_model) self.ff = PositionwiseFeedForward(d_model, dim_ff, dropout) self.norm2 = nn.LayerNorm(d_model) def forward(self, x: torch.Tensor, src_key_padding_mask: torch.Tensor | None = None) -> torch.Tensor: """单层编码层前向。 参数: - x: (B, S, C) - src_key_padding_mask: (B, S) True 为 padding 返回: - (B, S, C) """ # 自注意力子层 attn_out = self.self_attn(x, x, x, attn_mask=None, key_padding_mask=src_key_padding_mask) x = self.norm1(x + attn_out) # 前馈子层 ff_out = self.ff(x) x = self.norm2(x + ff_out) return x class DecoderLayer(nn.Module): """Transformer 解码层(自注意力 + 交叉注意力 + 前馈)""" def __init__(self, d_model: int, nhead: int, dim_ff: int, dropout: float = 0.1): super().__init__() self.self_attn = MultiHeadAttention(d_model, nhead, dropout) self.norm1 = nn.LayerNorm(d_model) self.cross_attn = MultiHeadAttention(d_model, nhead, dropout) self.norm2 = nn.LayerNorm(d_model) self.ff = PositionwiseFeedForward(d_model, dim_ff, dropout) self.norm3 = nn.LayerNorm(d_model) def forward( self, x: torch.Tensor, memory: torch.Tensor, tgt_mask: torch.Tensor | None = None, tgt_key_padding_mask: torch.Tensor | None = None, memory_key_padding_mask: torch.Tensor | None = None, ) -> torch.Tensor: """单层解码层前向。 参数: - x: (B, T, C) 解码器输入 - memory: (B, S, C) 编码器输出 - tgt_mask: (T, T) 因果掩码,true为屏蔽 - tgt_key_padding_mask: (B, T) - memory_key_padding_mask: (B, S) 返回: - (B, T, C) """ # 1) 解码器自注意力(带因果掩码 tgt_mask) sa = self.self_attn(x, x, x, attn_mask=tgt_mask, key_padding_mask=tgt_key_padding_mask) x = self.norm1(x + sa) # 2) 交叉注意力:Q 来自解码器,K/V 来自编码器 memory ca = self.cross_attn(x, memory, memory, attn_mask=None, key_padding_mask=memory_key_padding_mask) x = self.norm2(x + ca) # 3) 前馈 ff = self.ff(x) x = self.norm3(x + ff) return x class Encoder(nn.Module): def __init__(self, d_model: int, nhead: int, dim_ff: int, num_layers: int, dropout: float = 0.1): super().__init__() self.layers = nn.ModuleList([ EncoderLayer(d_model, nhead, dim_ff, dropout) for _ in range(num_layers) ]) def forward(self, x: torch.Tensor, src_key_padding_mask: torch.Tensor | None = None) -> torch.Tensor: """堆叠若干编码层。 参数: - x: (B, S, C) - src_key_padding_mask: (B, S) True 为 padding 返回: - (B, S, C) """ for layer in self.layers: x = layer(x, src_key_padding_mask=src_key_padding_mask) return x class Decoder(nn.Module): def __init__(self, d_model: int, nhead: int, dim_ff: int, num_layers: int, dropout: float = 0.1): super().__init__() self.layers = nn.ModuleList([ DecoderLayer(d_model, nhead, dim_ff, dropout) for _ in range(num_layers) ]) def forward( self, x: torch.Tensor, memory: torch.Tensor, tgt_mask: torch.Tensor | None = None, tgt_key_padding_mask: torch.Tensor | None = None, memory_key_padding_mask: torch.Tensor | None = None, ) -> torch.Tensor: """堆叠若干解码层。 参数: - x: (B, T, C) 目标端嵌入 - memory: (B, S, C) 编码器输出 - tgt_mask: (T, T) 因果掩码,True 为屏蔽 - tgt_key_padding_mask: (B, T) 目标端 padding 掩码 - memory_key_padding_mask: (B, S) 源端 padding 掩码 返回: - (B, T, C) """ for layer in self.layers: x = layer( x, memory, tgt_mask=tgt_mask, tgt_key_padding_mask=tgt_key_padding_mask, memory_key_padding_mask=memory_key_padding_mask, ) return x class Seq2SeqTransformer(nn.Module): """最小可运行的手写 Transformer 序列到序列模型 - 使用我们实现的 Encoder/Decoder/MHA/FFN - 仍保持与上文训练/解码接口一致 """ def __init__(self, src_vocab_size, tgt_vocab_size, d_model=128, nhead=4, num_encoder_layers=2, num_decoder_layers=2, dim_ff=256, dropout=0.1): super().__init__() self.d_model = d_model self.src_tok = nn.Embedding(src_vocab_size, d_model, padding_idx=PAD_IDX) self.tgt_tok = nn.Embedding(tgt_vocab_size, d_model, padding_idx=PAD_IDX) self.pos_enc = PositionalEncoding(d_model, dropout=dropout) self.encoder = Encoder(d_model, nhead, dim_ff, num_encoder_layers, dropout) self.decoder = Decoder(d_model, nhead, dim_ff, num_decoder_layers, dropout) self.generator = nn.Linear(d_model, tgt_vocab_size) def make_subsequent_mask(self, sz: int) -> torch.Tensor: """构造大小为 (sz, sz) 的下三角因果掩码;True 为屏蔽(不允许看未来)。""" return torch.triu(torch.ones(sz, sz, dtype=torch.bool), diagonal=1) def forward(self, src, tgt_in, src_pad_mask, tgt_pad_mask): """训练/教师强制阶段的前向。 参数: - src: (B, S) 源 token id - tgt_in: (B, T) 目标端输入(以 BOS 开头) - src_pad_mask: (B, S) True 为 padding - tgt_pad_mask: (B, T) True 为 padding(针对 tgt_in) 返回: - logits: (B, T, V) 词表维度的分类分布 """ # 1) 词嵌入 + 位置编码 src_emb = self.pos_enc(self.src_tok(src)) # (B,S,C) tgt_emb = self.pos_enc(self.tgt_tok(tgt_in)) # (B,T,C) # 2) 编码:仅使用 key_padding_mask 屏蔽 padding memory = self.encoder(src_emb, src_key_padding_mask=src_pad_mask) # (B,S,C) # 3) 解码:自注意力需要因果掩码 + padding 掩码;交叉注意力需要 memory 的 padding 掩码 tgt_mask = self.make_subsequent_mask(tgt_in.size(1)).to(src.device) # (T,T) out = self.decoder( tgt_emb, memory, tgt_mask=tgt_mask, tgt_key_padding_mask=tgt_pad_mask, memory_key_padding_mask=src_pad_mask, ) # (B,T,C) logits = self.generator(out) return logits @torch.no_grad() def greedy_decode(self, src_ids: List[int], max_len=20, device="cpu"): """在推理阶段进行贪心解码。 参数: - src_ids: 源端 token id 序列(不含 BOS/EOS) - max_len: 最大生成长度(含 BOS/EOS) - device: 运行设备 返回: - 生成的目标端 id 序列(含 BOS/EOS) """ #切换为评估模式,关闭dropout/batchnorm等随机性 self.eval() # 将源端token id序列转换为张量,并添加一个维度,如[1, 2, 3, 4] -> [[1, 2, 3, 4]] # 变为批维度的 (1, S);dtype 为 long 主要是以适配 nn.Embedding的输入格式。 src = torch.tensor(src_ids, dtype=torch.long, device=device).unsqueeze(0) # 生成一个跟src相同形状的mask矩阵,让编码器不要计算提取pandding的位置信息。 #按元素判断 src 是否等于 PAD_IDX,等于的位置为 True,不等的位置为 False。 src_pad_mask = src.eq(PAD_IDX) # 计算src_tok= src 经过词嵌入+位置编码后的结果 src_tok = self.src_tok(src) src_pos = self.pos_enc(src_tok) # 将该结果送入编码器,返回的memory就是编码器提取的特征向量。 # 输入编码器,即使没有填充(pandding)的token,也需要传入src_key_padding_mask。 memory = self.encoder(src_pos, src_key_padding_mask=src_pad_mask) # 初始化目标端token id序列,维度为(1,1),初始值为BOS_IDX # 表示目标端序列的开始,BOS_IDX=1 # 推理时输入是没有PAD,但是仍然需要tgt_pad_mask. ys = torch.tensor([[BOS_IDX]], dtype=torch.long, device=device) for _ in range(max_len - 1): #计算本次解码的Mask,跟ys形状一样。 tgt_pad_mask = ys.eq(PAD_IDX) # 计算本次因果掩码,把未来看到的token都屏蔽。 tgt_mask = self.make_subsequent_mask(ys.size(1)).to(device) # 可以看到当推理模式时,解码器输入token数量依次是1,2,3,4..... out = self.decoder( self.pos_enc(self.tgt_tok(ys)), memory, tgt_key_padding_mask=tgt_pad_mask, memory_key_padding_mask=src_pad_mask, ) # 转化为预测词的概率分布 logits = self.generator(out[:, -1:, :]) # 使用贪心选择概率最大的作为本次预测的目标 next_token = logits.argmax(-1) next_id = next_token.item() # 显示选择的token token_text = TGT_ITOS[next_id] if next_id < len(TGT_ITOS) else f"ID_{next_id}" print(f"选择: {token_text}({next_id})") ys = torch.cat([ys, next_token], dim=1) if next_id == EOS_IDX: break return ys.squeeze(0).tolist() # -------------------------- # 4) Train # -------------------------- device = torch.device("cuda" if torch.cuda.is_available() else "cpu") dataset = ToyDataset(pairs) loader = DataLoader(dataset, batch_size=8, shuffle=True, collate_fn=collate_fn) model = Seq2SeqTransformer( src_vocab_size=len(SRC_ITOS), tgt_vocab_size=len(TGT_ITOS), d_model=6, nhead=3, num_encoder_layers=2, num_decoder_layers=2, dim_ff=256, dropout=0.1 ).to(device) criterion = nn.CrossEntropyLoss(ignore_index=PAD_IDX) optimizer = torch.optim.AdamW(model.parameters(), lr=3e-4) def evaluate_sample(sent="我 有 一个 苹果"): """辅助函数:对输入中文句子进行编码→推理→解码并打印结果。""" ids = encode_src(sent) print("ids",ids) pred_ids = model.greedy_decode(ids, device=device) pred_text = decode_tgt(pred_ids) print(f'INPUT : {sent}') print(f'OUTPUT: {pred_text}\n') print("Before training:") evaluate_sample("我 有 一个 苹果") EPOCHS = 80 # 小步数即可过拟合玩具数据 for epoch in range(1, EPOCHS + 1): model.train() total_loss = 0.0 for src, tgt_in, tgt_out, src_pad_mask, tgt_pad_mask in loader: src = src.to(device) tgt_in = tgt_in.to(device) tgt_out = tgt_out.to(device) src_pad_mask = src_pad_mask.to(device) tgt_pad_mask = tgt_pad_mask.to(device) logits = model(src, tgt_in, src_pad_mask, tgt_pad_mask) # (B, T, V) loss = criterion(logits.reshape(-1, logits.size(-1)), tgt_out.reshape(-1)) optimizer.zero_grad() loss.backward() torch.nn.utils.clip_grad_norm_(model.parameters(), 1.0) optimizer.step() total_loss += loss.item() if epoch % 5 == 0 or epoch == 1: print(f"Epoch {epoch:02d} | loss={total_loss/len(loader):.4f}") evaluate_sample("我 有 一个 苹果") print("After training:") evaluate_sample("我 有 一个 苹果") evaluate_sample("我 有 一本 书") evaluate_sample("你 有 一个 苹果") -
dataset和DataLoader
简介 Dataset和DataLoader在pytorch中主要用于数据的组织。这两个类通常一起搭配处理深度学习中的数据流。 Dataset 用于产出“单个样本”:定义怎么按索引取到一个样本,以及总共有多少个样本。 DataLoader 负责“成批取样”:决定批大小、是否打乱、多进程加载、并用 collate_fn 把一个批里的样本“拼起来”(对齐、padding、mask、teacher forcing 等)。 一句话记忆:Dataset 只管“单条样本”;DataLoader 负责“多条怎么一起、怎么并行、怎么对齐”。变长就写 collate_fn,性能就调 workers/pin_memory/分桶。 Dataset Dataset类作用:定义数据集的统一接口,支持自定义数据加载逻辑。 关键方法: init:初始化数据路径、预处理函数等。 len:返回数据集样本总数。 getitem:根据索引返回单个样本(数据+标签)。 通常情况下用户都会有自己的数据集,所以定义的数据集类继承dataset。 #准备一个数据集 pairs: List[Tuple[str, str]] = [ ("我 有 一个 苹果", "i have an apple"), ("我 有 一本 书", "i have a book"), ("你 喜欢 书", "you like books"), ("我 吃 苹果", "i eat apples"), ] def build_vocab(texts: List[str]): tokens = set() for s in texts: tokens.update([w.lower() for w in s.split()]) itos = ["<pad>", "<bos>", "<eos>"] + sorted(tokens) stoi = {t: i for i, t in enumerate(itos)} return stoi, itos src_texts = [s for s, _ in pairs] tgt_texts = [t for _, t in pairs] SRC_STOI, SRC_ITOS = build_vocab(src_texts) TGT_STOI, TGT_ITOS = build_vocab(tgt_texts) PAD_IDX, BOS_IDX, EOS_IDX = 0, 1, 2 def encode_src(s: str) -> List[int]: return [SRC_STOI[w.lower()] for w in s.split()] def encode_tgt(s: str) -> List[int]: return [BOS_IDX] + [TGT_STOI[w.lower()] for w in s.split()] + [EOS_IDX] # Dataset:定义“单样本怎么取” @dataclass class Example: src: List[int] tgt: List[int] class ToyDataset(Dataset): def __init__(self, pairs: List[Tuple[str, str]]): for s, t in pairs: print("encode_src(s)",encode_src(s)) print("encode_tgt(t)",encode_tgt(t)) self.data = [Example(encode_src(s), encode_tgt(t)) for s, t in pairs] def __len__(self) -> int: return len(self.data) def __getitem__(self, idx: int) -> Example: return self.data[idx] 样本结构:用 Example(src: List[int], tgt: List[int]) 表示一条样本的源序列与目标序列(都是 token id 列表)。 词表与编码:源序列仅分词并映射到 id。目标序列前加 bos、后加 eos,便于自回归训练。 协议:实现 len 和 getitem 两个方法即可被 DataLoader 使用。 DataLoader class torch.utils.data.DataLoader(Data[T_co]): def __init__( self, dataset, batch_size: int = 1, shuffle: bool | None = None, sampler = None, batch_sampler = None, num_workers: int = 0, collate_fn = None, pin_memory: bool = False, drop_last: bool = False, timeout: float = 0, worker_init_fn = None, multiprocessing_context = None, generator = None, prefetch_factor: int = 2, persistent_workers: bool = False, pin_memory_device: str = "" ): ... dataset: Dataset 或 IterableDataset 实例。 batch_size: 每批样本数。 shuffle: 是否在每个 epoch 打乱索引(Map-style 且未显式传 sampler 时有效)。 sampler: 自定义样本采样器(与 shuffle 互斥;指定它就不要再用 shuffle)。 batch_sampler: 一次直接产出“一个 batch 的索引列表”(与 batch_size、shuffle、sampler 互斥)。 num_workers: 进程数(0 为主进程;>0 开多进程并行加载)。 collate_fn(samples_list) -> batch: 批内拼接函数;变长序列需要自定义(默认会尝试堆叠等长 tensor)。 pin_memory: 将 batch 固定到页锁内存,配合 CUDA 加速 H2D 拷贝。 drop_last: 数据量不是 batch_size 整数倍时,是否丢弃最后不满的一批。 timeout: 从 worker 等待数据的秒数(>0 时生效)。 worker_init_fn(worker_id): 每个 worker 的初始化回调(设随机种子、打开文件等)。 multiprocessing_context: 指定多进程上下文(spawn/forkserver 等)。 generator: 控制随机性(打乱、采样)用的随机数生成器。 prefetch_factor: 每个 worker 预取多少个 batch(num_workers > 0 时有效)。 persistent_workers: True 时 DataLoader 第一次迭代后保持 worker 不销毁,提高多轮迭代性能。 pin_memory_device: 当 pin_memory=True 时,指定固定内存的设备标签(一般留空即可)。 DataLoader返回是一个可迭代的对象,每次迭代产出一个批次的样本。一个批次的内容就是把当批样本列表交给 collate_fn 的返回值(若未自定义,则用 PyTorch 的默认 default_collate)。而类型取决于两点Dataset.getitem 返回什么(tensor/数值/dict/tuple…)和collate_fn 如何把一批“样本列表”拼成“批次”。 这里重点阐述一下collate_fn是一个用户需要注册的回调函数,目的是要把一个批的样本拼接起来。同时对于输入样本如果张量的形状不一致如变长序列,进行padding、对齐、mask等动作。 def collate_fn(batch: List[Example]): src_max = max(len(b.src) for b in batch) tgt_max = max(len(b.tgt) for b in batch) src_batch: List[List[int]] = [] tgt_in_batch: List[List[int]] = [] tgt_out_batch: List[List[int]] = [] for ex in batch: src = ex.src + [PAD_IDX] * (src_max - len(ex.src)) # teacher forcing:输入去掉最后一个、输出去掉第一个 tgt_in = ex.tgt[:-1] + [PAD_IDX] * (tgt_max - 1 - len(ex.tgt[:-1])) tgt_out = ex.tgt[1:] + [PAD_IDX] * (tgt_max - 1 - len(ex.tgt[1:])) src_batch.append(src) tgt_in_batch.append(tgt_in) tgt_out_batch.append(tgt_out) src = torch.tensor(src_batch, dtype=torch.long) # (B,S) tgt_in = torch.tensor(tgt_in_batch, dtype=torch.long) # (B,T) tgt_out = torch.tensor(tgt_out_batch, dtype=torch.long) # (B,T) src_pad_mask = src.eq(PAD_IDX) # (B,S) True=PAD tgt_pad_mask = tgt_in.eq(PAD_IDX) # (B,T) True=PAD return src, tgt_in, tgt_out, src_pad_mask, tgt_pad_mask 输入:batch 是若干个 Example,每个包含 src: List[int] 与 tgt: List[int](目标序列已含 bos/eos)。 核心:对齐变长序列(右侧 padding),构造 teacher forcing 的 (tgt_in, tgt_out),并生成 padding 掩码。 输出: src: (B, S) tgt_in: (B, T) tgt_out: (B, T) src_pad_mask: (B, S);True=PAD tgt_pad_mask: (B, T);True=PAD 首先使用src_max/tgt_max计算批内最长长度,这样能够将所有样本右侧补到同一长度,方便堆叠为矩阵。 接着定义批内累积的容器src_batch,tgt_in_batch,tgt_out_batch。 src_batch: 编码器输入样本的批次。 tgt_in_batch:解码器输入样本的批次。 tgt_out_batch:解码器输出样本的批次。 其次使用for循环对每个样本进行补齐,使其跟src_max、tgt_max长度一致,[PAD_IDX] * (src_max - len(ex.src))的意思是将[PAD_IDX]的单元素列表重复src_max - len(ex.src)用于拼接追加到ex.src后,使其对齐。tgt_in和tgt_out同理。 在对tgt_in和tgt_out做样本补齐时,因为输入ex.tgt是包含了bos和eos目标序列,对于tgt_in输入需要去掉最后一个token bos,tgt_out输出需要去掉第一个token eos。 然后就是将补齐的序列依次添加到src_batch,tgt_in_batch,tgt_out_batch。这样就对输入的数据进行了分类,把编码器的输入整合了在一起,解码器的输入和输出整合了一起。 最后就是将批内对齐后的源序列列表转换为张量,同时计算src和tag_in的mask,也就是说对数据哪些位置添加了pad。 下面是collate_fn相关的打印数据,便于理解。 batch [Example(src=[9, 10, 3, 11], tgt=[1, 11, 10, 4, 5, 2]), Example(src=[6, 8, 5], tgt=[1, 13, 12, 8, 2])] src [9, 10, 3, 11] tgt_in [1, 11, 10, 4, 5] tgt_out [11, 10, 4, 5, 2] src [6, 8, 5, 0] tgt_in [1, 13, 12, 8, 0] tgt_out [13, 12, 8, 2, 0] src_batch [[9, 10, 3, 11], [6, 8, 5, 0]] tgt_in_batch [[1, 11, 10, 4, 5], [1, 13, 12, 8, 0]] tgt_out_batch [[11, 10, 4, 5, 2], [13, 12, 8, 2, 0]] src tensor([[ 9, 10, 3, 11], [ 6, 8, 5, 0]]) tgt_in tensor([[ 1, 11, 10, 4, 5], [ 1, 13, 12, 8, 0]]) tgt_out tensor([[11, 10, 4, 5, 2], [13, 12, 8, 2, 0]]) src_pad_mask tensor([[False, False, False, False], [False, False, False, True]]) tgt_pad_mask tensor([[False, False, False, False, False], [False, False, False, False, True]]) src tensor([[ 9, 10, 3, 11], [ 6, 8, 5, 0]]) tgt_in tensor([[ 1, 11, 10, 4, 5], [ 1, 13, 12, 8, 0]]) tgt_out tensor([[11, 10, 4, 5, 2], [13, 12, 8, 2, 0]]) src_mask tensor([[False, False, False, False], [False, False, False, True]]) tgt_mask tensor([[False, False, False, False, False], [False, False, False, False, True]]) 最后完整的示例代码 #!/usr/bin/env python3 """ 最小可运行示例:用 Dataset + DataLoader(含 collate_fn)演示变长序列如何拼批并生成 padding 掩码。 运行: python3 dataloader_demo.py """ from dataclasses import dataclass from typing import List, Tuple import torch from torch.utils.data import Dataset, DataLoader # -------------------------- # 1) 准备一点语料(空格分词) # -------------------------- pairs: List[Tuple[str, str]] = [ ("我 有 一个 苹果", "i have an apple"), ("我 有 一本 书", "i have a book"), ("你 喜欢 书", "you like books"), ("我 吃 苹果", "i eat apples"), ] def build_vocab(texts: List[str]): tokens = set() for s in texts: tokens.update([w.lower() for w in s.split()]) itos = ["<pad>", "<bos>", "<eos>"] + sorted(tokens) stoi = {t: i for i, t in enumerate(itos)} return stoi, itos src_texts = [s for s, _ in pairs] tgt_texts = [t for _, t in pairs] SRC_STOI, SRC_ITOS = build_vocab(src_texts) TGT_STOI, TGT_ITOS = build_vocab(tgt_texts) PAD_IDX, BOS_IDX, EOS_IDX = 0, 1, 2 def encode_src(s: str) -> List[int]: return [SRC_STOI[w.lower()] for w in s.split()] def encode_tgt(s: str) -> List[int]: return [BOS_IDX] + [TGT_STOI[w.lower()] for w in s.split()] + [EOS_IDX] # -------------------------- # 2) Dataset:定义“单样本怎么取” # -------------------------- @dataclass class Example: src: List[int] tgt: List[int] class ToyDataset(Dataset): def __init__(self, pairs: List[Tuple[str, str]]): for s, t in pairs: print("encode_src(s)",encode_src(s)) print("encode_tgt(t)",encode_tgt(t)) self.data = [Example(encode_src(s), encode_tgt(t)) for s, t in pairs] def __len__(self) -> int: return len(self.data) def __getitem__(self, idx: int) -> Example: return self.data[idx] # -------------------------- # 3) collate_fn:把“样本列表”拼成一批(对齐 padding + 生成 mask + teacher forcing) # -------------------------- def collate_fn(batch: List[Example]): src_max = max(len(b.src) for b in batch) #计算批次内最长长度,这样能将样本右侧补齐到同一长度,方便堆叠矩阵 tgt_max = max(len(b.tgt) for b in batch) src_batch: List[List[int]] = [] tgt_in_batch: List[List[int]] = [] tgt_out_batch: List[List[int]] = [] print("batch",batch) for ex in batch: src = ex.src + [PAD_IDX] * (src_max - len(ex.src)) # teacher forcing:输入去掉最后一个、输出去掉第一个 tgt_in = ex.tgt[:-1] + [PAD_IDX] * (tgt_max - 1 - len(ex.tgt[:-1])) tgt_out = ex.tgt[1:] + [PAD_IDX] * (tgt_max - 1 - len(ex.tgt[1:])) print("src",src) print("tgt_in",tgt_in) print("tgt_out",tgt_out) src_batch.append(src) tgt_in_batch.append(tgt_in) tgt_out_batch.append(tgt_out) print("src_batch",src_batch) print("tgt_in_batch",tgt_in_batch) print("tgt_out_batch",tgt_out_batch) src = torch.tensor(src_batch, dtype=torch.long) # (B,S) tgt_in = torch.tensor(tgt_in_batch, dtype=torch.long) # (B,T) tgt_out = torch.tensor(tgt_out_batch, dtype=torch.long) # (B,T) src_pad_mask = src.eq(PAD_IDX) # (B,S) True=PAD tgt_pad_mask = tgt_in.eq(PAD_IDX) # (B,T) True=PAD print("src",src) print("tgt_in",tgt_in) print("tgt_out",tgt_out) print("src_pad_mask",src_pad_mask) print("tgt_pad_mask",tgt_pad_mask) return src, tgt_in, tgt_out, src_pad_mask, tgt_pad_mask # -------------------------- # 4) DataLoader:定义“如何按批取样本”并演示输出 # -------------------------- def main(): dataset = ToyDataset(pairs) for i in range(len(dataset)): print("dataset",dataset.__getitem__(i)) loader = DataLoader( dataset, batch_size=2, shuffle=True, num_workers=0, # 跨平台演示,用 0;Linux 可调大 collate_fn=collate_fn, pin_memory=False, ) # EPOCH=40 # for epoch in range(EPOCH): # for src, tgt_in, tgt_out, src_mask, tgt_mask in loader: # 前向、loss、反传、优化 total_steps = 1000 data_iter = iter(loader) for step in range(total_steps): try: src, tgt_in, tgt_out, src_mask, tgt_mask = next(data_iter) except StopIteration: # 当前迭代器用尽,重建一个新的(相当于进入新一轮) data_iter = iter(loader) src, tgt_in, tgt_out, src_mask, tgt_mask = next(data_iter) print("src",src) print("tgt_in",tgt_in) print("tgt_out",tgt_out) print("src_mask",src_mask) print("tgt_mask",tgt_mask) if __name__ == "__main__": main() iter(loader): 把可迭代的 DataLoader 变成“批次迭代器”。 next(iterator): 从该迭代器中取“下一个批次”。第一次调用就是“第一个 batch”。 it = iter(loader) batch1 = next(it) batch2 = next(it) 在 shuffle=True 时,每次 iter(loader) 相当于开始“新的一轮遍历”,顺序会重新洗牌;drop_last、num_workers、pin_memory 等参数会影响批次数量、并行加载与传输性能。 当然除了用next迭代,还是用for循环的方式,如下: for epoch in range(EPOCH): for src, tgt_in, tgt_out, src_mask, tgt_mask in loader: print("src", src) print("tgt_in", tgt_in) print("tgt_out", tgt_out) print("src_mask", src_mask) print("tgt_mask", tgt_mask) -
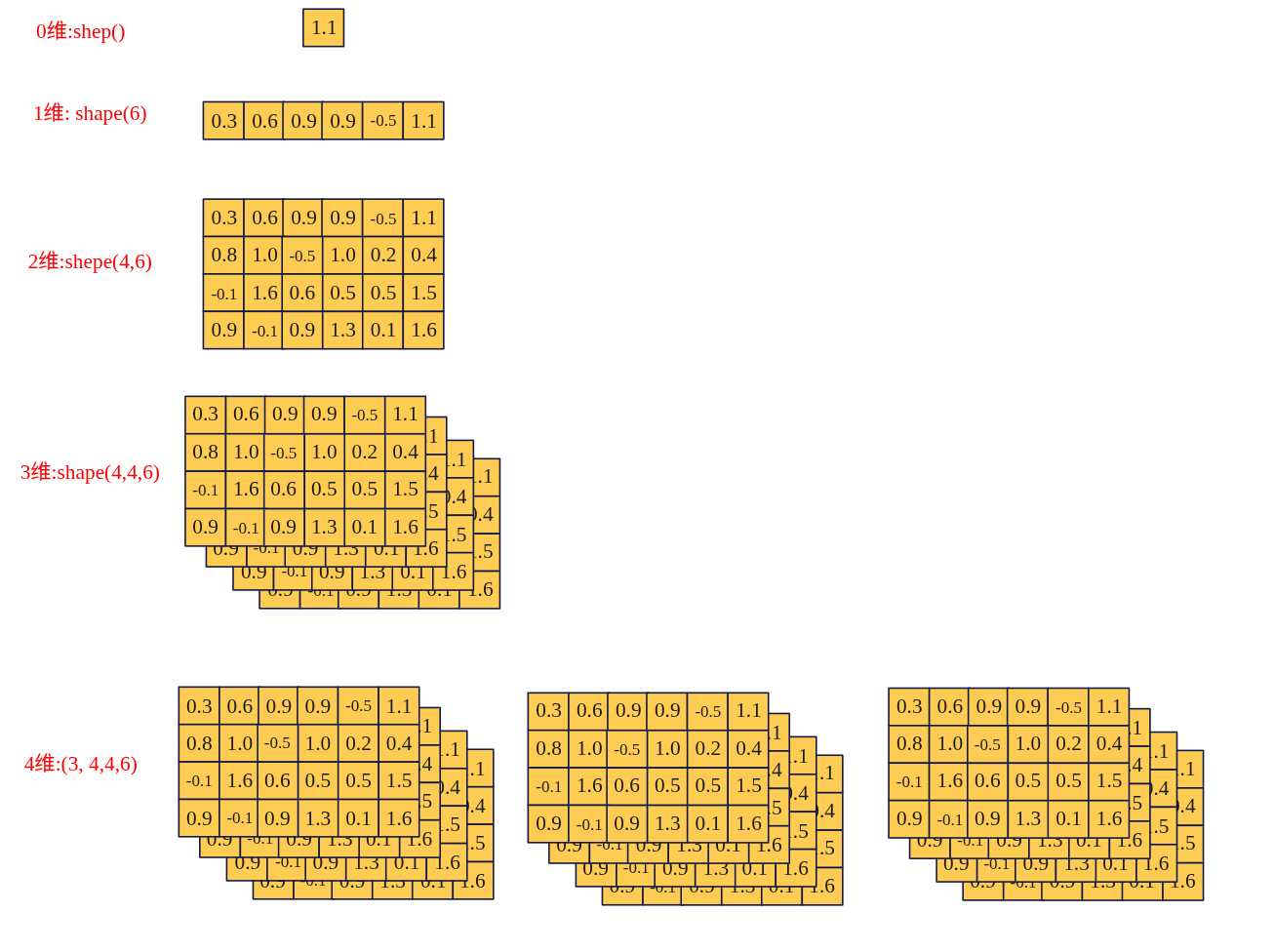
数据维度
维度是什么 维度=数据需要“几个”索引才能定位到一个元素,也叫做轴数(axis)或阶(rank)。 可以看成"套盒子"的层数,盒子里面装盒子,再装数字。每多一层外括号/分类,就多一维。 0维=一个数;1维=一排数;2维=表格;3维=一摞表格;更高维=外面再套一层一层分类; 判断有几个维度的方法: 获取一个元素需要几个索引才能定位到。 多一层外括号=多一维;形状从外到内写“有多少个”。(外层是更粗粒度的分类,写在前面,如小批量彩色图像 (B, C, H, W);批次B、通道C、高H、宽W) 1D: ──●──●──●── 一条线 2D: 行×列 一张表 ┌───────┐ │● ● ● │ │● ● ● │ └───────┘ 3D: 多张2D表叠成“砖块” 从0到多维的例子 0维(标量):单个数 42 标量 shape:(), 只要“指它自己”就能找到,例:体温36.5。 1维(向量):一排数 [3, 5, 8] 向量shape:(N),需要1个索引(第几个)才能定位。 2维(矩阵/表格):多排多列 [ [1, 2, 3], [4, 5, 6] [7, 8, 9]] 矩阵shape:(R,C),需要2个索引(第几行,第几列)才能定位到。 3维度(立体):多张矩阵堆叠 [ [[1,2,3], [4,5,6]], [[7,8,9], [11,12,13]] ] 或 层0: [ [...], [...], ... ] 层1: [ [...], [...], ... ] ... 立体shape:(D,R,C),需要3个索引(第几层、第几行、第几列)才能定位到。 n维(张量):继续外面套一层索引 如4维度,小批量彩色图像 (B, C, H, W);批次B、通道C、高H、宽W 深度学习场景维度含义 图像/CNN:(B,C,H,W),B为batch个数,C为图像通道,H为图像高度,W为图像宽度。 文本/transformer:(B,S,C),Batch size,批大小。一次前向里同时处理的样本数。S有时也写作L,Sequence length,序列长度/时间步数(NLP 的 token 数、语音/时序的帧数)。在图像等场景里,若把二维特征展平成序列,也可表示展平后的步数。Channels/Features,特征维度。NLP 里常指 embedding 或 d_model;CV 里指通道数;时序里指每步的特征维度。[B, S, C] 通常表示“B 个样本,每个样本有 S 个时间步/位置,每个时间步有 C 维特征”。 怎么理解C(特征维/通道数)? 在一个张量形状 [B, S, C] 中,C 表示“每个位置(序列中的每个 token/时间步)所携带的特征向量维度”。也就是“描述一个位置所需的数值属性个数”。 表达能力上限: C 越大,单个位置能承载的信息越丰富(更“宽”的向量空间),可拟合更复杂的模式。 稳定性与信息瓶颈: 太小的 C 可能造成信息瓶颈,难以表达远距离依赖或复杂结构。 计算与显存代价: 层内线性/注意力的主计算大多与 C^2 成正比,激活占用与 BLC 成正比。增大 C 会显著提高计算/显存成本。 x.dim() # 轴数,也就是多少个维度。 x.shape # 形状,如 (B,L,C) x.size(-1) # 最后一维长度 -
ONNX Runtime C++端侧模型部署YOLOv5
加载准备 初始化ONNXRuntime环境 Ort::Env env(ORT_LOGGING_LEVEL_WARNING, "YOLOv5Inference"); Ort::Env 是 ONNX Runtime C++ API 中用于初始化运行环境的类,有多个重载的构造函数,下面是一个构造函数原型及参数作用如下。 Ort::Env( OrtLoggingLevel logging_level, const char* logid, OrtLoggingFunction logging_fn = nullptr, void* logger_param = nullptr ); logging_level:控制日志输出级别 logid: 自定义日志标签,用于区分不同模块的日志来源 logging_fn:自定义日志回调函数,若为 nullptr 则使用默认日志输出到控制台。 logger_param:传递给自定义日志函数的用户参数(如上下文对象) 设置会话参数 Ort::SessionOptions session_options; session_options.SetIntraOpNumThreads(1); session_options.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_ALL); 初始化一个空的会话配置对象session_options,SetIntraOpNumThreads限制单个算子(Intra-op)内部使用的线程数为 1,适用于轻量级任务或避免多线程竞争,SetGraphOptimizationLevel启用所有图优化策略(如算子融合、常量折叠),提升推理性能。 模型加载 Ort::Session session_(env, modelPath.c_str(), session_options); Ort::Session 是 ONNX Runtime C++ API 中用于加载 ONNX 模型并创建推理会话的核心类,其功能分解如下。 Ort::Session( const Ort::Env& env, const char* model_path, const Ort::SessionOptions& options ); env:全局运行环境对象,管理线程池和内存分配等资源,需优先初始化。 model_path:ONNX 模型文件的路径,c语言的字符串类型。 options:会话参数,配置会话行为,如线程数、优化级别、硬件后端等。 获取输入和输出信息 输入名称 Ort::AllocatorWithDefaultOptions allocator; //创建默认内存分配器对象,用于管理 ONNX Runtime 中的内存分配(如节点名称字符串的内存 std::vector<const char*> input_node_names_; //存储 C 风格字符串指针,用于直接传递给 ONNX Runtime 的推理接口 std::vector<std::string> input_names_; //存储标准字符串对象的vector,用于长期维护字符串内存 size_t num_inputs_; num_inputs_ = session_.GetInputCount(); //获取输入节点的个数,有多少个节点就决定了多个个name,一般都是1个。 input_node_names_.resize(num_inputs_); input_names_.resize(num_inputs_, ""); //预分配容器空间,避免动态扩容的开销 std::cout << "num_inputs = "<< num_inputs_<<std::endl; for (size_t i = 0; i < num_inputs_; ++i) { auto input_name = session_.GetInputNameAllocated(i, allocator); //通过分配器安全获取第 i 个输入节点的名称(返回 Ort::AllocatedStringPtr 对象) input_names_[i].append(input_name.get()); //获取名称的原始指针,存入 input_names_ 的字符串中 input_node_names_[i] = input_names_[i].c_str(); //将 std::string 转换为 C 风格指针,供 input_node_names_ 使用 } 上面函数示例了如何获取输入节点name,首先通过session_.GetInputCount()获取到输入的节点,然后使用for循环进行遍历每个节点,通过session_.GetInputNameAllocated(i, allocator)获取每个节点的名称,返回一个Ort::AllocatedStringPtr智能指针,需要通过.get方法返回c字符串,由于智能指针指向的存储空间退出for后会销毁,所以上述代码将其复制到input_names_中。 输入张量维度 Ort::TypeInfo input_type_info = session_.GetInputTypeInfo(0); //获取模型第0个输入节点的类型信息对象,返回Ort::TypeInfo类型 auto input_tensor_info = input_type_info.GetTensorTypeAndShapeInfo(); //从类型信息中提取张量相关的形状和数据类型信息,返回Ort::TensorTypeAndShapeInfo对象 std::vector<int64_t> input_dims = input_tensor_info.GetShape(); //获取输入张量的维度信息,返回std::vector<int64_t>容器,存储各维度大小 //典型YOLO模型的输入维度为[batch, channel, height, width] int inputWidth = input_dims[3]; int inputHeight = input_dims[2]; 上面函数示例获取输入张量形状,最终通过张量的形状获取到了输入图像的宽和高。实际上可以简化一下,按照下面的方式。 auto inputShapeInfo = session_.GetInputTypeInfo(0).GetTensorTypeAndShapeInfo().GetShape(); int ch = inputShapeInfo[1]; inputWidth = inputShapeInfo[2]; inputHeight = inputShapeInfo[3]; 输出名称 std::vector<const char*> output_node_names_; //存储C风格字符串指针的vector,用于兼容需要const char*的ONNX Runtime API调用 std::vector<std::string> output_names_; //存储标准字符串对象的vector,用于长期维护字符串内存 size_t num_outputs_; num_outputs_ = session_.GetOutputCount(); //获取模型输出节点数量 output_node_names_.resize(num_outputs_); output_names_.resize(num_outputs_, ""); //预分配两个vector的空间 for (size_t i = 0; i < num_outputs_; ++i) { auto output_name = session_.GetOutputNameAllocated(i, allocator); output_names_[i].append(output_name.get()); //将名称存入std::string保证生命周期 output_node_names_[i] = output_names_[i].c_str(); } //循环获取每个输出节点名称 上面示例了获取输出名称,与输入方法类似。 输入预处理 cv::Mat image = cv::imread(imagePath); if (image.empty()) { std::cerr << "Error: Could not read image." << std::endl; return -1; } cv::Mat originalImage = image.clone(); cv::Size image_shape = originalImage.size(); // 图像预处理 std::vector<float> inputTensor = preprocess(image, inputWidth, inputHeight); 使用opencv读取图像,调用preprocess进行预处理。 std::vector<float> preprocess(const cv::Mat& image, int inputWidth = 320, int inputHeight = 320) { cv::Mat resizedImage; cv::resize(image, resizedImage, cv::Size(inputWidth, inputHeight)); //图像缩放:使用OpenCV的resize函数将图像调整为指定尺寸(默认320x320) cv::cvtColor(resizedImage, resizedImage, cv::COLOR_BGR2RGB); //颜色空间转换:从BGR转换为RGB格式(多数深度学习模型使用RGB输入) resizedImage.convertTo(resizedImage, CV_32F, 1.0 / 255.0); //数值归一化:通过convertTo将像素值从[0,255]归一化到[0,1]范围 std::vector<float> inputTensor; for (int c = 0; c < 3; ++c) { for (int h = 0; h < inputHeight; ++h) { for (int w = 0; w < inputWidth; ++w) { inputTensor.push_back(resizedImage.at<cv::Vec3f>(h, w)[c]); } } } //通过三重循环将OpenCV的HWC格式(Height-Width-Channel)转换为CHW格式 //内存布局变为连续通道数据:RRR...GGG...BBB,最终输出std::vector<float> return inputTensor; } 上面的代码实现了模型对输入数据的部分预处理,包括输入图片缩放固定尺寸,数值归一化,以及将格式转换为CHW张量格式,但是对于输入模型,需要的数据格式为Ort::Value类型。 std::vector<int64_t> input_shape = {1, 3, inputHeight, inputWidth}; //input_shape采用NCHW格式(批次数-通道-高度-宽度),这是深度学习模型的通用输入布局 auto memory_info = Ort::MemoryInfo::CreateCpu(OrtArenaAllocator, OrtMemTypeDefault); //描述用于描述内存分配的信息,包括内存的位置(CPU 或 GPU)以及内存的具体类型(固定内存或常规内存) Ort::Value input_tensor = Ort::Value::CreateTensor<float>(memory_info, inputTensor.data(), inputTensor.size(), input_shape.data(), input_shape.size()); 关于CreateTensor对象解析如下。 static Ort::Value CreateTensor<float>( const MemoryInfo& memory_info, // 内存管理策略 float* p_data, // 输入数据指针 size_t p_data_length, // 输入的大小 const int64_t* shape, // 维度数组指针 size_t shape_length // 维度数量 ); memory_info:指定张量内存分配策略,通常由Ort::MemoryInfo::CreateCpu创建。 inputTensor.data():输入数据的地址(需确保内存连续)。 inputTensor.size():输入数据的大小。 input_shape.data():输入张量的形状数组信息(如NCHW格式的{1,3,640,640})。 shape_length: 输入张量的形状信息维度数 模型推理 std::vector<Ort::Value> outputs = session_.Run( Ort::RunOptions{nullptr}, input_node_names_.data(), &input_tensor, 1, output_node_names_.data(), output_node_names_.size()); 下面是函数的参数 OrtStatus * OrtApi::Run( const OrtRunOptions * run_options, const char *const *input_names, //输入节点名称的数组 const OrtValue *const *inputs, //模型输入的数据Ort::Value类型 size_t input_len, //输入张量数量,需与input_names数组长度一致 const char *const *output_names,//输出节点名称数组 size_t output_names_len,//输出节点名称的数量,与output_names数组数量保持一致。 ) 输出后处理 //张量信息提取,outputs[0]指向坐标、分数张量指针,outputs[1]指向类别张量的指针 float* dets_data = outputs[0].GetTensorMutableData<float>(); //坐标(格式为[x1,y1,x2,y2,score]) float* labels_pred_data = outputs[1].GetTensorMutableData<float>(); //类别 //张量维度的解析,用于获取检测框的数量 auto dets_tensor_info = outputs[0].GetTensorTypeAndShapeInfo(); std::vector<int64_t> dets_dims = dets_tensor_info.GetShape(); size_t num_detections = dets_dims[1]; //结构化重组,解析输出的张量将其存储dets、scores、lables_pred std::vector<std::vector<float>> dets(num_detections, std::vector<float>(4)); std::vector<float> scores(num_detections); std::vector<int> labels_pred(num_detections); //遍历解析存储坐标dets、分数scores、标签类别lables_pred for (size_t i = 0; i < num_detections; ++i) { for (int j = 0; j < 4; ++j) { dets[i][j] = dets_data[i * 5 + j]; } scores[i] = dets_data[i * 5 + 4]; labels_pred[i] = static_cast<int>(labels_pred_data[i]); } //将坐标信息进行缩放以适应正常的图片大小。 float scale_x = static_cast<float>(image_shape.width) / inputWidth; float scale_y = static_cast<float>(image_shape.height) / inputHeight; for (auto& det : dets) { det[0] *= scale_x; det[1] *= scale_y; det[2] *= scale_x; det[3] *= scale_y; } 上面的代码从输出张量信息中进行解析,将坐标、分数、标签类别依次存储到dets、scores、lables_pred中。 void visualizeResults(cv::Mat& image, const std::vector<std::vector<float>>& dets, const std::vector<float>& scores, const std::vector<int>& labels_pred, const std::vector<std::string>& labels, float conf_threshold = 0.4) { for (size_t i = 0; i < dets.size(); ++i) { const auto& det = dets[i]; float score = scores[i]; if (score > conf_threshold) { int class_id = labels_pred[i]; int x1 = static_cast<int>(det[0]); int y1 = static_cast<int>(det[1]); int x2 = static_cast<int>(det[2]); int y2 = static_cast<int>(det[3]); std::string label = labels[class_id]; cv::rectangle(image, cv::Point(x1, y1), cv::Point(x2, y2), cv::Scalar(0, 255, 0), 2); cv::putText(image, label + ": " + std::to_string(score), cv::Point(x1, y1 - 10), cv::FONT_HERSHEY_SIMPLEX, 0.9, cv::Scalar(0, 255, 0), 2); } } } 最终将获取到的将坐标、分数、标签类别传入到visualizeResults进行绘制。 发现一个开源的ai toolkit,相对比较全。https://github.com/xlite-dev/lite.ai.toolkit/tree/main -
pip install
是什么 pip install 是python包管理器,用于python软件包的下载、安装、卸载等功能。 怎么用 在线安装 pip install 软件包名 pip install 软件包名==版本号 例如pip install requests,或pip install requests==1.1。 也可以从文件列表中获取安装 pip install -r requirements.txt 从requirements.txt文件安装依赖,通常用于项目的依赖管理。 pip的软件包一般有两种格式: whl (Wheel) 格式: 文件是一种预编译的Python包格式,类似于Windows的.exe安装文件,但专门用于Python。 tar.gz:包含了Python包的源代码,需要先解压,然后pip会根据其中的setup.py文件进行编译和安装。 whl文件是pip推荐的安装包格式,因为它更快,而.tar.gz文件则用于源代码分发和离线安装。 torchvision-0.17.1-cp311-cp311-macosx_10_13_x86_64.whl 这个命名规则是什么?第一个cp311是编译是python版本为3.11,第二个cp311表示ABI(应用二进制接口)兼容 Python 3.1,确保与 Python 3.11 环境完全适;操作系统架构为macos 10.13以上,x86_64 intel/AMD 64位。 离线升级 pip install --no-index --find-links=./offline_packages -r requirements.txt no-index:表示不从网上获取安装。 find-links:选择本地包的路径 r:下载所有依赖,可省略。 获取软件包可以通过u盘或者下载的方式,看看怎么下载。 pip download -d ./offline_packages -r requirements.txt 升级 pip install --upgrade 软件包名 或简写方式: pip install -U 软件包 用于升级软件包名称。包括升级pip。 软件包源 查看源 pip config list 安装软件时不指定源就会默认从当前的源获取,对应的配置文件路径:~/.config/pip/pip.conf 设置源 pip config set global.index-url <源地址> 示例:pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple 永久设置源,将会写到配置文件。 pip config unset global.index-url 删除全局配置的源。 指定源 pip install xxx -i https:xxx 或者pip install xxx --index-url https:xxx 也可以从github中获取 pip install git+<仓库地址> 常用源 清华大学:https://pypi.tuna.tsinghua.edu.cn/simple 阿里云:https://mirrors.aliyun.com/pypi/simple/ 中国科学技术大学:https://pypi.mirrors.ustc.edu.cn/simple/ 卸载 pip uninstall 软件包名 卸载对应的软件包。 查看 pip --version 查看pip的版本。 pip list 列出安装了那些包 -

ONNX Runtime Python端侧模型部署YOLOv5
ONNX Runtime介绍 ONNX Runtime不依赖于Pytorch、tensorflow等机器学习训练模型框架。他提供了一种简单的方法,可以在CPU、GPU、NPU上运行模型。通常ONNX Runtime用于端侧设备模型的运行推理。要使用ONNX Runtime运行模型,一般的步骤如下: 用你最喜欢的框架(如pytorch、tensorflow、paddle等)训练一个模型。 将模型转换或导出为ONNX格式。 在端侧使用ONNX Runtime加载并运行模型。 模型的训练和导出为ONNX格式这里就不再阐述了。下面基于python在端侧运行模型的示例: import numpy # 导入numpy模块 import onnxruntime as rt # 导入onnxruntime模块 sess = rt.InferenceSession( "logreg_iris.onnx", providers=rt.get_available_providers()) # 加载模型logreg_iris.onnx input_name = sess.get_inputs()[0].name # 获取模型的输入名称,对应的是使用https://netron.app/中intput name。 pred_onx = sess.run(None, {input_name: X_test.astype(numpy.float32)})[0] # 运行模型推理,返回结果到pred_onx中 print(pred_onx) 上面给出的python示例中,端侧运行模型可以总结为2个步骤。加载模型,模型推理。 加载模型 class onnxruntime.InferenceSession( path_or_bytes: str | bytes | os.PathLike, sess_options: onnxruntime.SessionOptions | None = None, providers: Sequence[str | tuple[str, dict[Any, Any]]] | None = None, provider_options: Sequence[dict[Any, Any]] | None = None, **kwargs) path_or_bytes: 模型文件名或者ONNX、ORT格式二进制。 sess_options: 会话选项,比如配置线程数、优先级。 providers: 指定执行提供者优先级(['CUDAExecutionProvider','CPUExecutionProvider']) provider_options: 字典序列,为每个提供者配置专属参数(如CUDA设备ID) options = onnxruntime.SessionOptions() options.SetIntraOpNumThreads(4) # 多设备优先级配置 session = InferenceSession( "model.onnx", sess_options=options, providers=[ ('CUDAExecutionProvider', {'device_id': 0}), 'CPUExecutionProvider' ] ) 模型推理 outputs = senssion.run(output_names, input_feed, run_options=None) output_names:输出节点名称,字符串列表,指定需要获取的输出节点名称,若为None则返回所有输出 input_feed:输入数据,字典类型,结构为{"输入节点名": numpy数组/ORTValue},建议使用ORTValue封装输入数据以减少CPU-GPU拷贝开销。 run_options:运行参数,如日志级别。 import numpy as np import onnxruntime as ort # 创建示例数据 cpu_data = np.random.rand(1, 3, 224, 224).astype(np.float32) # 转换为GPU上的ORTValue gpu_ort_value = ort.OrtValue.ortvalue_from_numpy( cpu_data, device_type='cuda', # 关键参数:指定GPU设备 device_id=0 # GPU设备ID(多卡时指定) ) print(gpu_ort_value.device_name()) # 输出: 'Cuda' results = session.run( ["output_name"], {"input_name": gpu_ort_value} # 避免CPU->GPU拷贝 ) 在运行模型是,需要获取模型的输入和输出名称,可以通过调用对应的函数session.get_inputs(),session.get_outputs()来获取。inputs和outputs函数返回的是onnxruntime.NodeArg类,该类是ONNX Runtime中表示计算图节点输入/输出参数的核心类,该类有3个成员变量,如下: property name: 参数唯一标识符,对应计算图中的节点名称。 property shape: 张量形状。 property type:数据类型(如tensor(float32)/tensor(int64)) 以下是获取输入名称和输出名称的示例。 input_name = session.get_inputs()[0].name output_names = [output.name for output in session.get_outputs()] 详细请参考:https://onnxruntime.ai/docs/api/python/api_summary.html YOLOv5运行示例 加载模型 session_options = ort.SessionOptions() session_options.intra_op_num_threads = 1 # 加载 ONNX 模型 session = ort.InferenceSession( "yolov5_n.q.onnx", sess_options=session_options, providers=["XXXExecutionProvider"]) 创建SessionOptions对象用于定制化会话行为,限制算子内部并行线程数为1,加载名为yolov5_n.q.onnx的量化版YOLOv5模型,指定自定义执行提供者XXXExecutionProvider。 图像预处理 image = cv2.imread(args.image) #image shape (375, 500, 3) image_shape = image.shape[:2] #image_shape的值(375, 500),取前面2个值为图像的宽高 # 获取图像的尺寸大小高和宽。 input_tensor = preprocess(image) # 图像预处理函数 def preprocess(image, input_size=(640, 640)): # 调整图像大小为640*640, image = cv2.resize(image, input_size) # 转换颜色空间RGB image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) # 归一化处理 #astype(np.float32)将图像像素值从整数类型(如uint8)转换为32位浮点数, #避免后续除法运算的精度损失,/ 255.0将像素值从[0,255]的原始范围线性映射到[0,1]区间, #符合神经网络输入的典型数值范围要求 image = image.astype(np.float32) / 255.0 # 转置模型为CHW格式,原输入是HWC格式。 # 输入的数据是(640,640,3),需要调整为NCHW模型格式 [batch, channel, height, width] # 使用np.transpose进行转置,变换成(3,640,640) image = np.transpose(image, (2, 0, 1)) image = np.expand_dims(image, axis=0) # 接着再加上一个轴变化成(1,3,640,640)tensor。 return image 如何理解深度学习中的轴了? 在深度学习中,轴可以理解为维度。如上图是一个NCHW排布的格式,把N当成第一个维度即位轴0,C第二维度即为轴1,H第三维度即为轴2,W为第四维度即为轴3。np.expand_dims(image, axis=0)即拓展了轴0,原来只有3个维度现在变成4个维度了,N为1。还可以按照指定的轴进行求和,即做压缩。执行np.sum(data, axis=0)时,也就是沿着N的维度就行压缩求和,就变成如上图。由原来的(N,C,W,H)变成了(C',W',H'),即N个CWH中的各自相加。如果是np.sum(data,axis=1),那就是按照C维度方向进行相加,结果就是(N,W,H),即如RGB格式就是每个图像RGB 3通道的像素相加,如下图所示。 模型推理 模型推理前,需要获取计算图输入和输入的名称 input_name = session.get_inputs()[0].name output_names = [output.name for output in session.get_outputs()] print('input name', input_name) print('output name', output_names) 输出结果与下图对应。 input name input output name ['dets', 'labels'] 获取到intput_name和ouput_names后,即可调用运行推理。 outputs = session.run(output_names, {input_name: input_tensor}) 模型后处理 # 把batch这个维度去掉 dets = outputs[0].squeeze() labels_pred = outputs[1].squeeze() #将坐标进行缩放以适应实际图片的大小。 input_size = (640, 640) scale_x = image_shape[1] / input_size[0] scale_y = image_shape[0] / input_size[1] dets[:, 0] *= scale_x dets[:, 1] *= scale_y dets[:, 2] *= scale_x dets[:, 3] *= scale_y 模型outputs有两个输出,一个是dets,这是一个二位数组dets[n][5],其中det[5]包含了坐标x1, y1, x2, y2,score,前面4个预选框的坐标,后面一个为预选框的分数。 def visualize_results(image, dets, labels_pred, labels, conf_threshold): for i in range(len(dets)): det = dets[i] score = det[4] #每个框的分数 if score > conf_threshold: #小于分数的剔除 class_id = int(labels_pred[i]) x1, y1, x2, y2 = map(int, det[:4]) label = labels[class_id] cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2) cv2.putText(image, f'{label}: {score:.2f}', (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 255, 0), 2) return image 根据阈值分数进行画框,最终完成结果的后处理,注意上面并没有进行极大值抑制。