进程调度简介
调度类别

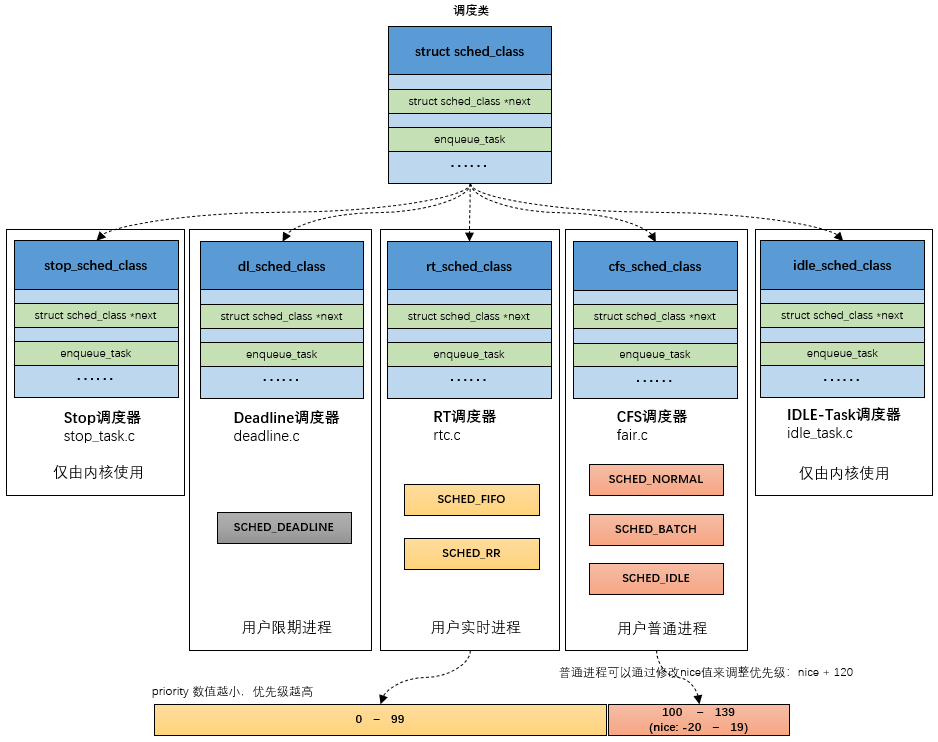
进程调度依赖于调度策略(schedule policy),linux内核把相同的调度策略抽象成调度类(schedule class)。不同类型的进程采用不同的调度策略,目前Linux内核中默认采用5种调度类,分别是stop、deadline、realtime、CFS和idle。
- Stop:最高优先级的进程,只在多核场景下启用,用于热插拔等场景下停止CPU。
- Dealine:用于有严格时间要求的实时进程,优先级为-1。
- Realtime:用于普通的实时进程,优先级为0~99。
- CFS:完全公平调度,非实时类进程,优先级100~139。
- Idle:最低优先级进程,当所有进程都没运行之后运行idle,仅供内核使用。
实际上STOP、IDLE不算是真正意义上的调度类,因为其需要在比较特殊的场景下由内核去执行,因此重点的调度主要分为三个DL,RT,CFS。
Linux用户空间程序可以使用如sched_setscheduler来设定用进程的调度策略,SCHED_NORMAL、SCHED_BATCH、SCHED_IDLE使用CFS。SCHED_FIFO和SCHED_RR用于Realtime。SCHED_DEADLINE用于DL调度。
SCHED_FIFO和SCHED_RR使用Realtime。SCHED_FIFO和SCHED_RR的区别是,SCHED_RR按时间片循环运行,如优先级相同的进程,轮流运行固定长度时间片,而SCHED_FIFO先到先得,会一直运行直到自愿放弃或被更高优先级抢占为止。
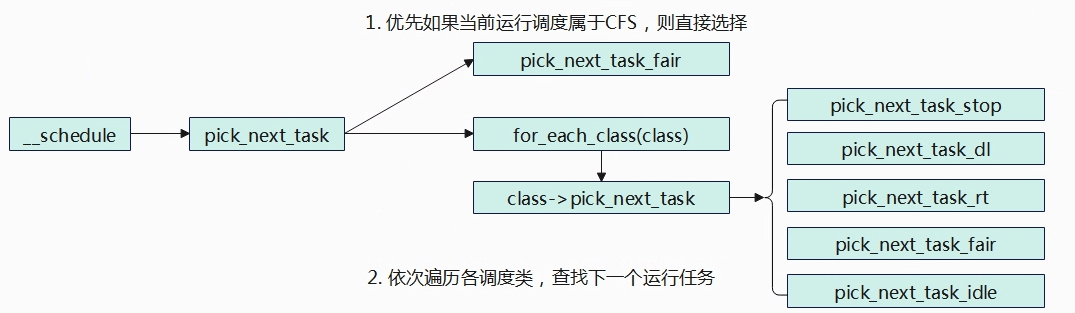
Linux系统中,按照优先级顺序从高到低顺序遍历各个调度器,如果某个调度器成功取出了任务,则选择任务进行调度。
kernel/sched/core.c
for_each_class(class) {
p = class->pick_next_task(rq);
if (p)
return p;
}
chrt -p 1234 # 可以查看 pid=1234 的进程的 调度策略
chrt -p -f 10 1234 # 修改调度策略为 SCHED_FIFO, 并且优先级为10
调度时机
调度队列
在linux系统中,定义了一个全局的struct rq类型的数组runqueues,每个CPU对应一个数组成员,定义如下:
kernel/sched/core.c
static DEFINE_PER_CPU_SHARED_ALIGNED(struct rq, runqueues);
kernel/sched/sched.h
#define cpu_rq(cpu) (&per_cpu(runqueues, (cpu))) 根据CPU编号获取rq
#define this_rq() this_cpu_ptr(&runqueues) 获取当前进程的rq
#define task_rq(p) cpu_rq(task_cpu(p)) 获取进程p所在的rq
#define cpu_curr(cpu) (cpu_rq(cpu)->curr) 根据CPU编号获取正在运行的进程
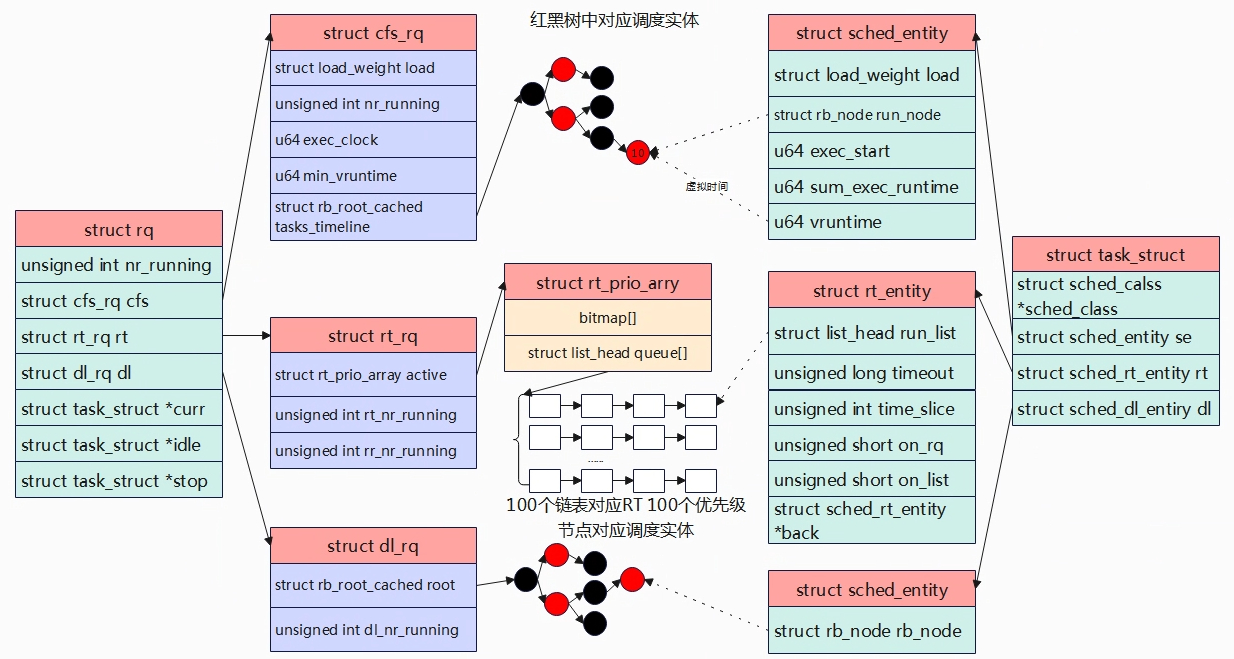
上 图列出了struct rq与struct task_struct之间的关系。每个CPU都对应一个struct rq实体。rq中分别对应3个调度队列(暂不考虑stop、idle类,从数据结构也可以看出stop、idle属于特殊调度类)。
cfs_rq对应的是CFS调度,CFS就绪进程通过红黑树来组织,调度优先选择vruntime最小的进行。
rt_rq对应的是RT调度,RT就绪进程通过链表来组织,每个优先级对应一条链表,相同优先级的进程挂载到同一条链表上;每个链表对应一个bitmap,系统通过查询bitmap的位0或1来判断当前链表中是否有进程就绪。系统调度是一次从高优先级开始遍历查询对应的bitmap,进而选择对应进程运行。
dl_rq对应的是DL调度,后续再阐述。
触发调度
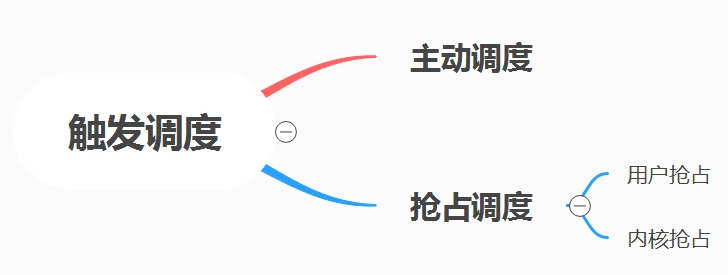
调度顾名思义就是选择一个进程运行,包括系统启动运行的第一个进程,以及运行过程中从当前运行进行切换到另外一个进程。在Linux系统中触发调度的可以分为两类:主动让出调度与抢占式调度(与FreeRTOS的区别,就是抢占式调度这里,FreeRTOS是systick来进行调度,有时间片的概念,而Linux不在有时间片的概念)。
主动调度是CPU主动放弃CPU,包括主动Sleep,读写IO,Mutex等。
抢占调度在Linux系统中并不是立即得到调度权,而是在需要抢占调度时设置一个标志(TIF_NEED_RESCHED),Linux系统在合适时机检测到这个标志会进行调度,因此抢占调度可以分为三个阶段设置抢占调度标志、检测抢占调度标志、选择任务调度。
无论是主动调度还是抢占调度,最终调用的都是函数schedule。
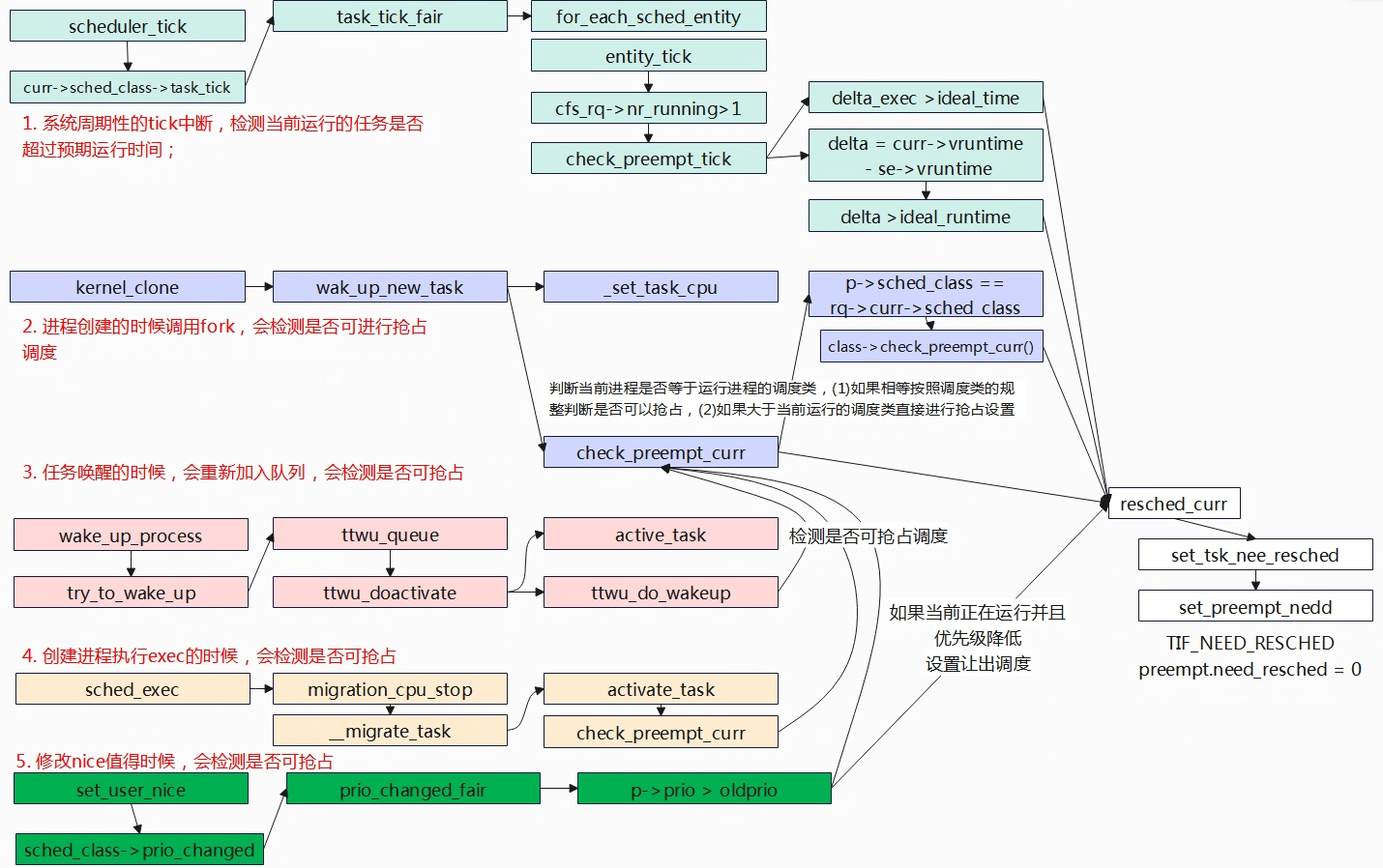
设置抢占调度标志
设置抢占调度的标志一般有以下场景:
– Tick调度:Linux系统中有周期性的时钟,会周期性的检测当前的进程是否运行idle_runtime超期。
– 任务创建:新创建任务的时候,会将任务加入到就绪队列中,会根据优先级判定是否需要抢占。
– 任务唤醒:任务在获取到等待的资源从睡眠中唤醒,判定是否需要抢占。
– 任务切换:调整调度类、优先级等。
– 带宽控制:分配给当前运行的任务带宽用尽。
以上只是列出了部分设置抢占调度标志的代码流程,并未全部列出,并且代码流程做了简化。
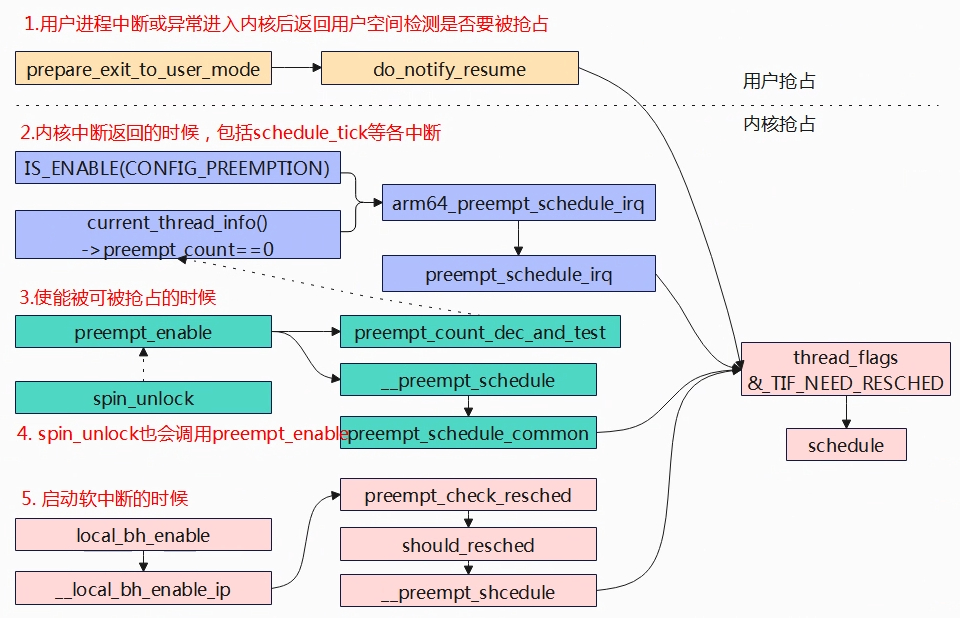
检测抢占标志
选择任务调度